低负载工业机器人腕部传动装置
本技术属于机器传动,尤其涉及低负载工业机器人腕部传动装置。
背景技术:
1、工业机器人,一般采用多个关节的机械手臂,以实现工作空间内任意位置和姿态的调整。从方便机器人运动控制算法和操作灵活性的目标考虑,机器人腕部三关节轴线汇交于一点,且机构尺寸尽量小、传递载荷尽量大。在机器人本体研发过程中,腕部传动方案的设计是一个非常关键的环节,是整个机器人机械部分研发的技术核心之一。
2、但是,现有技术中机器人腕部的操作爪一般是通过螺栓固定安装,不易对操作爪进行更换。
技术实现思路
1、本实用新型的目的在于提供低负载工业机器人腕部传动装置,用于解决现有技术中机器人腕部的操作爪一般是通过螺栓固定安装,不易对操作爪进行更换的技术问题。
2、为了实现上述目的,本实用新型采用了如下技术方案:
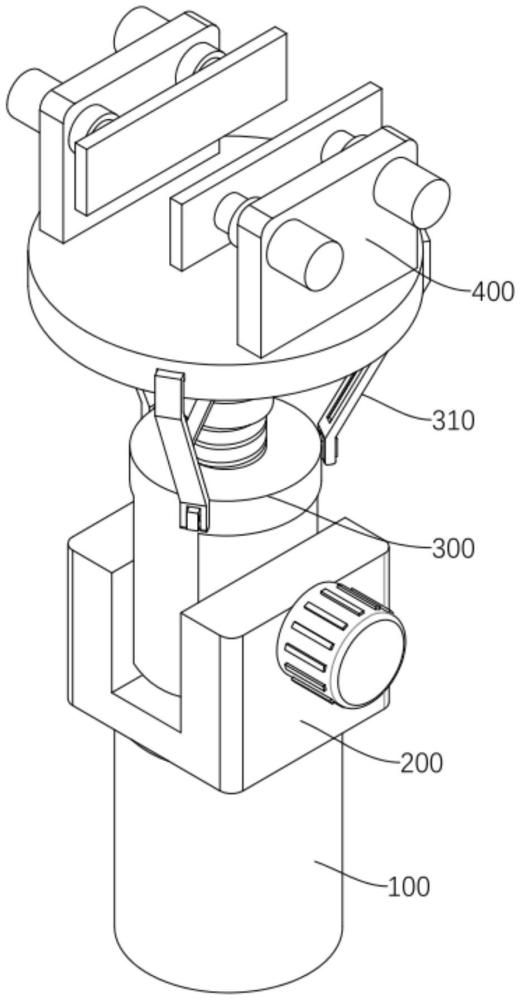
3、低负载工业机器人腕部传动装置,包括:固定筒;安装座,与所述固定筒转动连接;转动座,与所述安装座转动连接;操作爪,位于所述转动座上方;快拆机构,用于将所述操作爪快速安装在转动座上,或将所述操作爪快速从转动座上拆卸,其包括:多个卡爪,均与所述转动座的侧面铰接;多个限位插块,分别安装在多个所述卡爪上,用于插入进所述操作爪内;调节组件,用于使多个所述限位插块同时向转动座的中心方向移动或使多个限位插块同时向远离转动座的方向移动。
4、优选的,所述操作爪包括:安装板;多个插槽,等距安装在所述安装板侧面,与所述限位插块插接配合;两个竖板,均安装在所述安装板顶面;多个液压缸,分别安装在两个所述竖板上;两个夹板,分别与多个所述液压缸的延伸端固定连接。
5、优选的,所述调节组件包括:螺纹柱,安装在所述转动座的顶面中心位置;螺纹筒,与所述螺纹柱螺纹连接;转动环,转动套设在所述螺纹筒上;多个支撑杆,其一端与所述转动环固定连接,其另一端与所述卡爪滑动连接;顶块,与所述螺纹柱上端螺纹连接。
6、优选的,所述卡爪上开设有滑槽,所述滑槽内滑动连接有滑块,所述支撑杆远离转动环的一端与滑块铰接。
7、综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
8、1、本实用新型中的快拆机构通过设置多个卡爪、多个限位插块和调节组件,通过向上或向下移动调节组件,使多个限位插块同时向转动座的中心方向移动或使多个限位插块同时向远离转动座的方向移动,从而把便于将操作爪快速安装在转动座上或快速将操作爪从转动座上拆下,提高了安装和拆卸的效率,便于对操作爪进行检修。
9、2、本实用新型中的快拆机构通过设置顶块,在安装操作爪时,通过转动顶块,使得顶块向上移动,使得顶块的顶部与安装板的底面抵紧,从而使安装板与多个卡爪连接的更牢固。
技术特征:
1.低负载工业机器人腕部传动装置,其特征在于,包括:
2.根据权利要求1所述的低负载工业机器人腕部传动装置,其特征在于,所述操作爪(400)包括:
3.根据权利要求1所述的低负载工业机器人腕部传动装置,其特征在于,所述调节组件包括:
4.根据权利要求3所述的低负载工业机器人腕部传动装置,其特征在于:所述卡爪(311)上开设有滑槽(313),所述滑槽(313)内滑动连接有滑块(318),所述支撑杆(317)远离转动环(316)的一端与滑块(318)铰接。
技术总结
本技术公开了低负载工业机器人腕部传动装置,属于机器传动技术领域,包括固定筒、安装座、转动座、操作爪和快拆机构。本技术中的快拆机构通过设置多个卡爪、多个限位插块和调节组件,通过向上或向下移动调节组件,使多个限位插块同时向转动座的中心方向移动或使多个限位插块同时向远离转动座的方向移动,从而把便于将操作爪快速安装在转动座上或快速将操作爪从转动座上拆下,提高了安装和拆卸的效率,便于对操作爪进行检修。
技术研发人员:罗丽梅,王飞,王鹏
受保护的技术使用者:四川希望汽车职业学院
技术研发日:20240606
技术公布日:2025/3/27
- 还没有人留言评论。精彩留言会获得点赞!