一种双夹具4轴桁架机械手的制作方法
本技术属于机械手领域,更具体地说,尤其是涉及到一种双夹具4轴桁架机械手。
背景技术:
1、四轴桁架主要通过伺服电机控制起到对x轴、y轴、z轴、旋转轴的方向运动,对其物体进行夹取移动,用于实现工件的旋转、倾斜等动作,在机械夹取设备里,四轴桁架机械手可以完成各种复杂的自动化生产任务。
2、基于上述本实用新型人发现,现有的双夹具4轴桁架机械手主要存在以下几点不足,比如:
3、四轴桁架机械手在夹取较重的圆柱体或近似圆柱体工件时,需要控制移动和对工件的夹取,当所夹取的工件超出内部零件的负载,对减速机和齿条机构将受重影响寿命,容易在操作过程中出现机构故障而掉落,且普通的夹具在对其圆柱体或近似圆柱体工件抓取时,接触面较小,较难将其稳固的夹住。
4、因此需要提出一种双夹具4轴桁架机械手。
技术实现思路
1、为了解决上述技术四轴桁架机械手在夹取较重的圆柱体或近似圆柱体工件时,需要控制移动和对工件的夹取,当所夹取的工件超出内部零件的负载,对减速机和齿条机构将受重影响寿命,容易在操作过程中出现机构故障而掉落,且普通的夹具在对其圆柱体或近似圆柱体工件抓取时,接触面较小,较难将其稳固的夹住的问题。
2、本实用新型一种双夹具4轴桁架机械手的目的与功效,由以下具体技术手段所达成:
3、其结构包括主支架、平面架、机械手、衔接体、主夹装置,所述平面架焊接于平面架下表面,所述机械手安装于平面架上且可活动,所述衔接体贯穿于机械手内部且可与主夹装置相衔接,其特征在于:
4、所述机械手包括横齿轮、横齿纹条、伺服电机、控制箱、气缸、衔接环、限位轨、衔接块,所述横齿轮上端与伺服电机相连接,所述横齿轮转动带动横齿纹条水平移动,所述横齿轮通过衔接块与控制箱相连接,所述衔接块嵌套于限位轨表面,所述衔接环安装于主夹装置上表面,所述气缸贯穿于控制箱内部,所述横齿轮通过伺服电机控制转动带动整体顺着横齿纹条水平移动,从而达到移动的效果。
5、所述气缸包括竖齿纹条、竖齿轮、气缸杆、抽杆、固定块、内置格、防护壳,所述竖齿纹条与竖齿轮齿纹连接,所述抽杆嵌入于气缸杆内部且可活动,所述抽杆底端与固定块相固定,所述固定块焊接于内置格外表面,所述气缸杆固定于防护壳内部,所述气缸杆与竖齿纹条相平行,所述竖齿纹条与内置格外表面相固定,所述抽杆通过固定块跟随内置格一并活动,所述竖齿轮通过转动使其竖齿纹条能够带动衔接部位垂直移动。
6、所述气缸包括衔接层、第四轴伺服电机、延伸方管、衔接壳、夹具,所述衔接层安装于夹具上表面,所述第四轴伺服电机安装于延伸方管内部,所述延伸方管与内置格为一体化结构,所述衔接壳衔接于延伸方管下端,所述第四轴伺服电机通过衔接壳与衔接层相连接,所述延伸方管与抽杆相平行,所述延伸方管外表面焊接有竖齿纹条,所述延伸方管位于控制箱内部垂直移动,所述衔接壳能够通过转动力带动衔接层转动。
7、作为本实用新型的进一步改进,所述衔接体包括固定底、延伸条、卡扣头,所述固定底固定于控制箱上表面,所述延伸条通过固定底固定于控制箱上表面,所述延伸条远离固定底的一端安装有卡扣头,所述卡扣头可与衔接环相连接固定,所述延伸条根据延伸方管移动时进行弯曲拉伸,所述延伸条具有一定软度,能够在受到衔接部位的拉动时弯曲拉扯。
8、作为本实用新型的进一步改进,所述限位轨设有四个且呈水平方向进行安装,所述延伸方管设有两个,所述固定块焊接于延伸方管外表面,所述衔接块三个为一组且共设有四组,所述衔接环为圆环形结构且两个为一组。
9、作为本实用新型的进一步改进,所述夹具为对称结构且可活动,所述固定块能够衔接延伸方管与抽杆同步移动,所述衔接壳整体为圆柱体结构方便内部第四轴伺服电机的转动,所述抽杆为圆柱体结构,所述防护壳对内部安装部件进行遮挡防护,所述横齿纹条与竖齿纹条两者为垂直方向。
10、作为本实用新型的进一步改进,所述夹具包括倾斜头、夹块、衔接轴、夹臂、调整格、转动轴、限位槽,所述倾斜头与夹块为一体化结构,所述衔接轴贯穿夹块将其固定于夹臂表面,所述夹臂安装于调整格内部且铰链连接,所述转动轴通过衔接层与调整格相连接,所述限位槽贯穿于调整格顶部,所述夹块两个为一组且对称安装,所述转动轴顶端与第四轴伺服电机相连接,所述转动轴通过转轴控制夹臂的活动,所述夹臂为对称结构且两个为一组。
11、作为本实用新型的进一步改进,所述平面架包括横架、限位块,所述横架上表面固定有限位轨,所述限位块与限位轨安装于同一水平面上与横架相固定,所述限位块两个为一组且共设有四组,所述限位块限制同一轨迹上的移动范围。
12、作为本实用新型的进一步改进,所述主支架包括三角块、叠加杆、斜拉方管、巩固杆、固定螺丝、固定板、横固杆,所述三角块固定于叠加杆与主支架之间,所述巩固杆焊接于斜拉方管外表面,所述斜拉方管底端通过固定螺丝与固定板相固定,所述横固杆垂直焊接于两个主支架之间,所述斜拉方管设有两个且均倾斜安装,所述斜拉方管倾斜角度与主支架形成三角形结构,起到稳固的作用。
13、与现有技术相比,本实用新型具有如下有益效果:
14、1.通过内置格内部的第四轴伺服电机启动控制通过转动轴对夹臂进行转动控制,让其夹块能够张开于工件两侧,在通过转动让夹臂回位,在夹具固定好工件后,工件的移动主要通过延伸方管进行带动,由抽杆跟延伸方管持续移动伸缩从而对延伸方管所承受的工件重量进行分担,在横齿轮转动时,将会顺着横齿纹条的齿纹移动,从而带动衔接块顺着限位轨的轨迹进行平移,伺服电机所连接的竖齿轮转动将会顺着竖齿纹条进行垂直移动,其延伸方管垂直移动时,延伸条将会弯曲拉伸,其抽杆在气缸杆内部伸缩移动,对夹具所夹的工件起到分担重力,对延伸方管辅助支撑活动的作用,能够在夹具所夹取较重的圆柱体工件时,夹具的夹头具有一定的倾斜角度,能够更好的固定在圆柱体表面,有气缸对延伸方管起到辅助支撑受力的作用,能够有效的提高z轴机构动作速度和响应,有利于延长减速机和齿条机构的使用寿命,且第四轴伺服电机隐藏于z轴方管内部,结构更紧凑美观,在电机或气缸一个机构故障的时候机构也不会意外下坠。
15、2.当机械手在平面架上端进行移动操作控制工件时,底端由主支架对其进行四个角固定,避免不了限位时和机械手移动过程中所产生的晃动,在主支架的侧面还有斜拉方管与主支架形成一个倾斜角度,固定螺丝能够让整体固定在一个稳固的位置,其三角块能够对原本的主支架与平面架进行巩固,在机械手位于平面架表面进行移动操作时所产生的晃动,能够更有效的稳固住,支架呈倾斜角度形成三角形,能够在设备操作移动过程中所产生的晃动更有效的进行稳固,使其设备能够更好的进行操控。
技术特征:
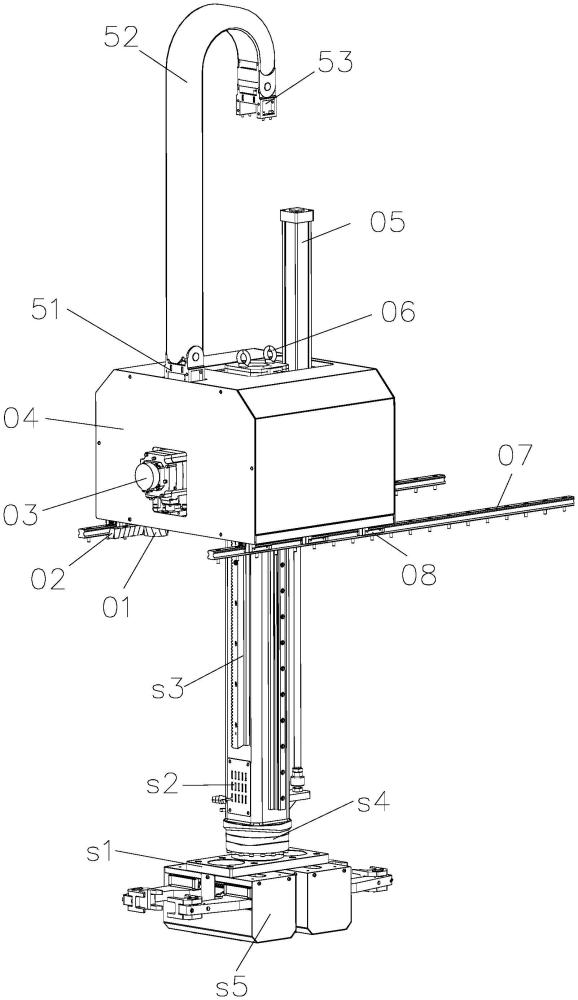
1.一种双夹具4轴桁架机械手,其结构包括主支架(1)、平面架(2)、机械手(3)、衔接体(4)、主夹装置(5),所述平面架(2)焊接于平面架(2)下表面,所述机械手(3)安装于平面架(2)上且可活动,所述衔接体(4)贯穿于机械手(3)内部且可与主夹装置(5)相衔接,其特征在于:
2.根据权利要求1所述的一种双夹具4轴桁架机械手,其特征在于:所述衔接体(4)包括固定底(51)、延伸条(52)、卡扣头(53),所述固定底(51)固定于控制箱(04)上表面,所述延伸条(52)通过固定底(51)固定于控制箱(04)上表面,所述延伸条(52)远离固定底(51)的一端安装有卡扣头(53),所述卡扣头(53)可与衔接环(06)相连接固定,所述延伸条(52)根据延伸方管(s3)移动时进行弯曲拉伸。
3.根据权利要求1所述的一种双夹具4轴桁架机械手,其特征在于:所述限位轨(07)设有四个且呈水平方向进行安装,所述延伸方管(s3)设有两个,所述固定块(m5)焊接于延伸方管(s3)外表面,所述衔接块(08)三个为一组且共设有四组。
4.根据权利要求1所述的一种双夹具4轴桁架机械手,其特征在于:所述夹具(s5)为对称结构且可活动,所述固定块(m5)能够衔接延伸方管(s3)与抽杆(m4)同步移动,所述衔接壳(s4)整体为圆柱体结构方便内部第四轴伺服电机(s2)的转动,所述抽杆(m4)为圆柱体结构,所述防护壳(m7)对内部安装部件进行遮挡防护。
5.根据权利要求1所述的一种双夹具4轴桁架机械手,其特征在于:所述夹具(s5)包括倾斜头(x1)、夹块(x2)、衔接轴(x3)、夹臂(x4)、调整格(x5)、转动轴(x6)、限位槽(x7),所述倾斜头(x1)与夹块(x2)为一体化结构,所述衔接轴(x3)贯穿夹块(x2)将其固定于夹臂(x4)表面,所述夹臂(x4)安装于调整格(x5)内部且铰链连接,所述转动轴(x6)通过衔接层(s1)与调整格(x5)相连接,所述限位槽(x7)贯穿于调整格(x5)顶部,所述夹块(x2)两个为一组且对称安装,所述转动轴(x6)顶端与第四轴伺服电机(s2)相连接,所述转动轴(x6)通过转轴控制夹臂(x4)的活动。
6.根据权利要求1所述的一种双夹具4轴桁架机械手,其特征在于:所述平面架(2)包括横架(g1)、限位块(g2),所述横架(g1)上表面固定有限位轨(07),所述限位块(g2)与限位轨(07)安装于同一水平面上与横架(g1)相固定,所述限位块(g2)两个为一组且共设有四组。
7.根据权利要求1所述的一种双夹具4轴桁架机械手,其特征在于:所述主支架(1)包括三角块(71)、叠加杆(72)、斜拉方管(73)、巩固杆(74)、固定螺丝(75)、固定板(76)、横固杆(77),所述三角块(71)固定于叠加杆(72)与主支架(1)之间,所述巩固杆(74)焊接于斜拉方管(73)外表面,所述斜拉方管(73)底端通过固定螺丝(75)与固定板(76)相固定,所述横固杆(77)垂直焊接于两个主支架(1)之间,所述斜拉方管(73)设有两个且均倾斜安装。
技术总结
本技术公开了一种双夹具4轴桁架机械手,其结构包括主支架、平面架、机械手、衔接体、主夹装置,机械手包括横齿轮、横齿纹条、伺服电机、控制箱、气缸、衔接环、限位轨、衔接块,气缸包括竖齿纹条、竖齿轮、气缸杆、抽杆、固定块、内置格、防护壳,在夹具固定好工件后,工件的移动主要通过延伸方管进行带动,由抽杆跟延伸方管持续移动伸缩从而对延伸方管所承受的工件重量进行分担,有气缸对延伸方管起到辅助支撑受力的作用,能够有效的提高Z轴机构动作速度和响应,有利于延长减速机和齿条机构的使用寿命,且第四轴伺服电机隐藏于Z轴方管内部,结构更紧凑美观,在电机或气缸一个机构故障的时候机构也不会意外下坠。
技术研发人员:徐超聪
受保护的技术使用者:漳州超跃自动化科技有限公司
技术研发日:20240607
技术公布日:2025/2/20
- 还没有人留言评论。精彩留言会获得点赞!