有大鱼际肌的机器人手部装置的制作方法
本技术涉及一种机器人手部装置,尤指一种提高动态握持稳定度的有大鱼际肌的机器人手部装置。
背景技术:
1、随着机器人科技发展,机器人能够做的事情越来越多,特别是在餐饮部分,机器人能够模仿专业厨师的动作,进行煎煮炒炸等料理方式。
2、在机器人模仿专业厨师的料理动作时,时常需要通过机器人手部装置来握持锅具的手柄位置,并且需要进行颠勺等料理动作。而现有的机器人手部装置的设计只有5个手指产生的握力,仅能够在静态下握住锅具的手柄,让锅具不致掉落。当需要通过机器人手部装置进行颠勺等料理动作时,锅具会因为移动产生较大的冲击力道,导致机器人手部装置产生的握力无法握持住动态的锅具,致使锅具无法按照预期的轨迹来操作锅具。如此一来,机器人便无法稳定的模仿专业厨师的料理动作。因此,望能以一种新的机器人手部装置,以改进上述无法稳定握持动态锅具的缺点。
技术实现思路
1、有鉴于上述问题,本实用新型提供一种有大鱼际肌的机器人手部装置,能够提高有大鱼际肌的机器人手部装置的动态握持稳定度,以降低锅具掉落的风险。
2、该有大鱼际肌的机器人手部装置包含有:
3、数个手指单元;
4、一手掌单元,枢接该数个手指单元;
5、一大鱼际单元,设置于该手掌单元朝向一掌心位置的一侧面;
6、一第一驱动单元,连接该数个手指单元及该手掌单元;
7、一第二驱动单元,连接该大鱼际单元;
8、一处理单元,电连接该第一驱动单元及该第二驱动单元;
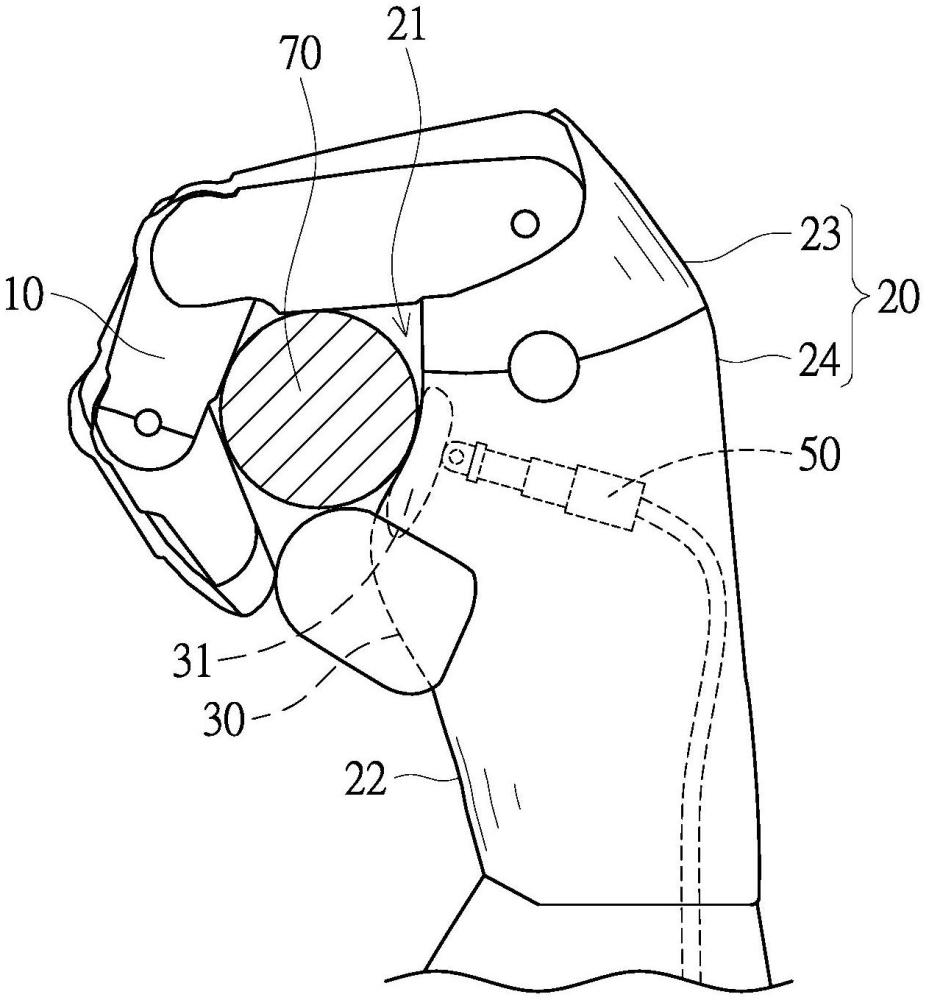
9、其中,当该处理单元产生一握持指令时,该处理单元通过该第一驱动单元驱动该数个手指单元及该手掌单元朝该掌心位置弯折,直至该数个手指单元及该手掌单元握持住一物件,且该处理单元通过该第二驱动单元驱动该大鱼际单元朝该掌心位置移动,直至该大鱼际单元抵靠该物件。
10、该有大鱼际肌的机器人手部装置进一步设置有该大鱼际单元,且该大鱼际单元于该处理单元产生该握持指令时,该大鱼际单元会朝向该掌心位置移动,并抵靠该有大鱼际肌的机器人手部装置握持的物件,借此加固了该有大鱼际肌的机器人手部装置握持该物件的稳定度,并提高有大鱼际肌的机器人手部装置的动态握持稳定度,降低锅具掉落的风险。
技术特征:
1.一种有大鱼际肌的机器人手部装置,其特征在于,包含有:
2.如权利要求1所述的有大鱼际肌的机器人手部装置,其特征在于,当该处理单元产生一放手指令时,该处理单元通过该第一驱动单元驱动该数个手指单元及该手掌单元背离该掌心位置弯折,直至该数个手指单元及该手掌单元复原至一开掌位置,且该处理单元通过该第二驱动单元驱动该大鱼际单元背离该掌心位置移动,直至该大鱼际单元复原至一原始位置。
3.如权利要求1所述的有大鱼际肌的机器人手部装置,其特征在于,该手掌单元包含有:
4.如权利要求3所述的有大鱼际肌的机器人手部装置,其特征在于,该大鱼际单元系设置于该手掌单元的该第二掌部。
5.如权利要求1所述的有大鱼际肌的机器人手部装置,其特征在于,该第一驱动单元系数个钢线。
6.如权利要求1所述的有大鱼际肌的机器人手部装置,其特征在于,该第二驱动单元为一螺杆。
7.如权利要求1所述的有大鱼际肌的机器人手部装置,其特征在于,该大鱼际单元为一硅胶块或一橡胶块。
技术总结
本技术为一种有大鱼际肌的机器人手部装置,包含有手指单元、手掌单元、大鱼际单元、第一驱动单元、第二驱动单元及处理单元。当处理单元产生握持指令时,处理单元通过第一驱动单元驱动手指单元及手掌单元朝掌心位置弯折,直至手指单元及手掌单元握持住物件,且处理单元通过第二驱动单元驱动大鱼际单元朝掌心位置移动,直至大鱼际单元抵靠该物件。如此,有大鱼际肌的机器人手部装置便可通过大鱼际单元夹持该物件,以更为稳固的固定方式握持住物件,提高动态握持稳定度,降低物件掉落的风险。
技术研发人员:孙德善,程立晖
受保护的技术使用者:欣坊股份有限公司
技术研发日:20240621
技术公布日:2025/3/31
- 还没有人留言评论。精彩留言会获得点赞!