一种工业机器人的转动关节的制作方法
本技术涉及工业机器人,具体为一种工业机器人的转动关节。
背景技术:
1、公开号为cn213165451u公开的一种工业机器人的转动关节,其包括主动装置与从动装置,主动装置的内部开设有圆槽,主动装置的右端固定连接有固定盘,固定盘的一侧固定连接有插销,插销贯穿于固定盘与主动装置,固定盘的一侧开设有轴孔,轴孔中穿插有主动轴,主动轴远离固定盘的一端固定连接有主动齿轮。使用时,随着电机的转动带动主动轴转动,主动轴转动使主动装置内部的轴承开始转动,由于轴承表面的轴承槽中有钢珠,利用钢珠在圆槽内壁转动,实现整体的工作,主动轴转动带动主动齿轮开始转动,主动齿轮的转动带动从动齿轮开始转动,然后带动从动装置的从动轴,将动力传递下去。
2、其简化了内部装置达到同样的效果,减少了维修成本。
3、但在工业机器人的转动关节都是通过两关节间的齿轮啮合来实现,齿轮在使用后发生磨损,两关节啮合的精度就产生影响,工作越久,磨损就越严重,那么对精度的影响就越大,此方案转动关节的精度不佳。
技术实现思路
1、对现有技术的不足,本实用新型提供了一种工业机器人的转动关节,解决了工业机器人的转动关节都是通过两关节间的齿轮啮合来实现,齿轮在使用后发生磨损,两关节啮合的精度就产生影响,工作越久,磨损就越严重,那么对精度的影响就越大的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种工业机器人的转动关节,包括定位筒,所述定位筒的内部设有驱动电机,所述驱动电机的输出端固定安装有可伸缩的转动杆,所述转动杆的表面固定安装有定位板,所述定位板的表面设有挤压组件,所述转动杆的一端设有两个相啮合的齿轮;
3、所述挤压组件包括固定安装在定位板表面的伸缩杆,所述伸缩杆的一端固定安装有抵挡块,所述抵挡块的底部固定安装有弹簧,所述弹簧的底部和定位板的表面相连接。
4、在某一具体实施例中,所述定位筒的表面固定安装有密封盖,所述密封盖的表面开设有和驱动电机输出端相适配大小的贯通槽。
5、在某一具体实施例中,所述定位筒的背部固定安装有安装板,所述安装板表面的两侧均设有用于固定的定位栓。
6、在某一具体实施例中,所述抵挡块表面的中部开设有导向槽,所述导向槽的大小和转动杆的大小相适配,所述转动杆贯通抵挡块。
7、在某一具体实施例中,所述抵挡块的直径大于伸缩杆一端的直径,所述弹簧的直径小于抵挡块的直径。
8、在某一具体实施例中,所述转动杆的内部开设有滑动槽,所述滑动槽的内部滑动连接有卡接杆,所述卡接杆的一端固定安装有齿轮。
9、与现有技术相比,本实用新型提供了一种工业机器人的转动关节,具备以下有益效果:
10、本实用新型所公开的技术方案中,利用转动杆、定位板和挤压组件的配合使用,在齿轮在转动的过程中,弹簧将带动抵挡块对其中一个齿轮进行推动,使两个齿轮啮合更加紧密,减少了齿轮因磨损而导致精度降低的情况发生,提高了齿轮的使用寿命。
11、通过本实用新型设置的挤压组件的设置,在使用的过程中,人员将伸缩杆安装在定位板的表面,在转动杆转动时,将带动定位板件转动,伸缩杆将会因弹簧的自动复位特性,对抵挡块进行推动,抵挡块对齿轮进行推动,齿轮受到推动时,将会向前和另一个齿轮啮合更加紧密,提高了齿轮传动的精准度。
技术特征:
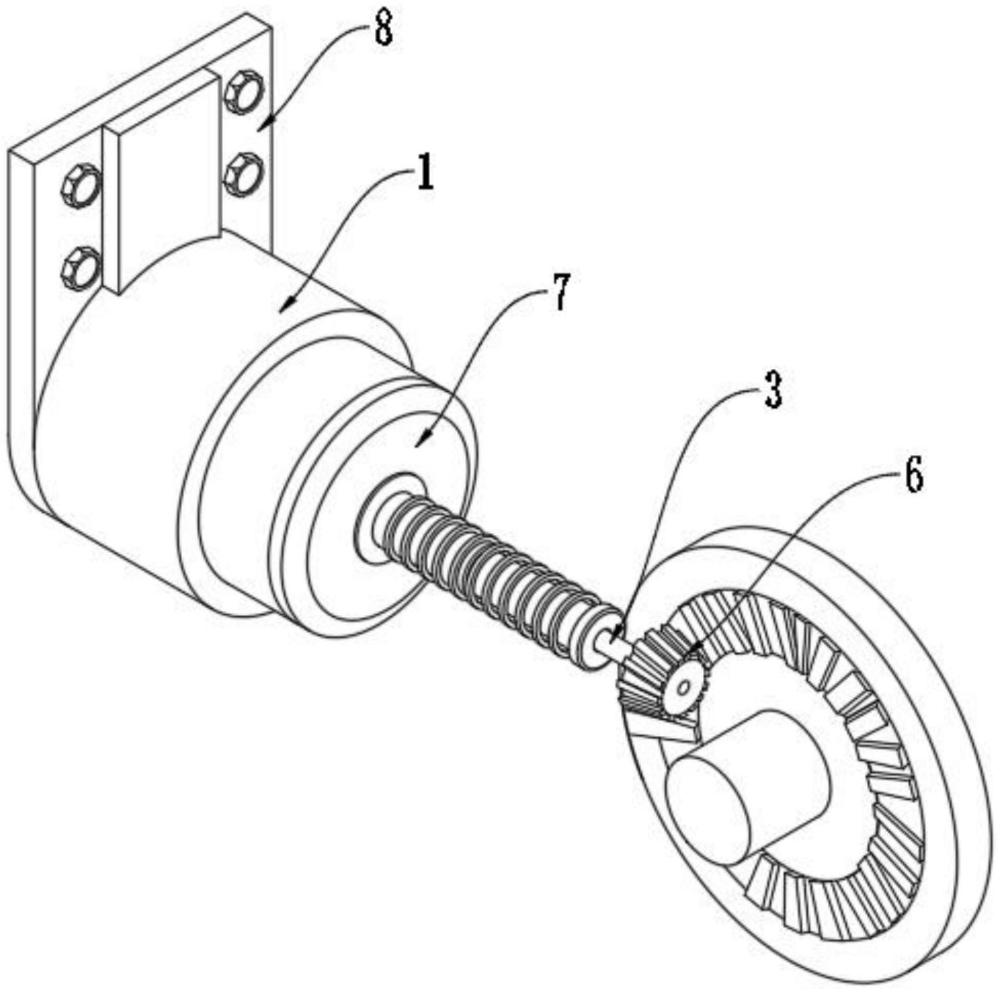
1.一种工业机器人的转动关节,包括定位筒(1),其特征在于:所述定位筒(1)的内部设有驱动电机(2),所述驱动电机(2)的输出端固定安装有可伸缩的转动杆(3),所述转动杆(3)的表面固定安装有定位板(4),所述定位板(4)的表面设有挤压组件(5),所述转动杆(3)的一端设有两个相啮合的齿轮(6);
2.根据权利要求1所述的一种工业机器人的转动关节,其特征在于:所述定位筒(1)的表面固定安装有密封盖(7),所述密封盖(7)的表面开设有和驱动电机(2)输出端相适配大小的贯通槽。
3.根据权利要求1所述的一种工业机器人的转动关节,其特征在于:所述定位筒(1)的背部固定安装有安装板(8),所述安装板(8)表面的两侧均设有用于固定的定位栓。
4.根据权利要求1所述的一种工业机器人的转动关节,其特征在于:所述抵挡块(52)表面的中部开设有导向槽,所述导向槽的大小和转动杆(3)的大小相适配,所述转动杆(3)贯通抵挡块(52)。
5.根据权利要求1所述的一种工业机器人的转动关节,其特征在于:所述抵挡块(52)的直径大于伸缩杆(51)一端的直径,所述弹簧(53)的直径小于抵挡块(52)的直径。
6.根据权利要求1所述的一种工业机器人的转动关节,其特征在于:所述转动杆(3)的内部开设有滑动槽,所述滑动槽的内部滑动连接有卡接杆,所述卡接杆的一端固定安装有齿轮(6)。
技术总结
本技术涉及工业机器人技术领域,解决了工业机器人的转动关节都是通过两关节间的齿轮啮合来实现,齿轮在使用后发生磨损,两关节啮合的精度就产生影响,工作越久,磨损就越严重,那么对精度的影响就越大的问题。具体为一种工业机器人的转动关节,包括定位筒,所述定位筒的内部设有驱动电机,所述驱动电机的输出端固定安装有可伸缩的转动杆,所述转动杆的表面固定安装有定位板,所述定位板的表面设有挤压组件,所述转动杆的一端设有两个相啮合的齿轮,所述挤压组件包括固定安装在定位板表面的伸缩杆,所述伸缩杆的一端固定安装有抵挡块,所述抵挡块的底部固定安装有弹簧,所述弹簧的底部和定位板的表面相连接。
技术研发人员:李军,曹飞,叶恺
受保护的技术使用者:合肥大开自动化控制有限公司
技术研发日:20240711
技术公布日:2025/4/21
- 还没有人留言评论。精彩留言会获得点赞!