一种辅助夹持机械手的制作方法
本技术涉及夹持机械手领域,具体为一种辅助夹持机械手。
背景技术:
1、夹持机械手,顾名思义,是一种能够借助机械动力进行抓取和夹持操作的机械装置。它在现代工业生产和物流仓储等领域中发挥着重要作用,为生产和高效作业提供了有力支持。
2、目前,公告号为cn220945426u的中国实用新型,公开了一种辅助夹持机械手,包括:隐藏壳;防脱自锁组件,防脱自锁组件用于防止机械手故障时夹持物件意外脱落;防脱自锁组件包括两个主弹簧、多个从弹簧以及多个t型支撑座,两个主弹簧均设置于隐藏壳的内部,多个从弹簧均设置于隐藏壳的外部,两个主弹簧与多个从弹簧的两端均固定有安装圈,多个t型支撑座的顶部均开设有螺纹孔。通过主弹簧的拉扯下主条板回滑,两个扩收条杆另一端通过两个移动条拉动左爪和右爪靠近将中间夹持物夹住,在从弹簧的弹力作用下将物品夹持固定,机械爪夹持物件时不依靠动力机构,避免了动力机构故障时影响机械手爪的夹持稳定性且能防止夹持物品坠落。
3、综上所述,相比上述方案其不能够有效便于对其进行移动调节,同时还不能够有效便于对工件进行快速辅助夹持。为此,我们提供了一种辅助夹持机械手。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本实用新型提供了一种辅助夹持机械手,解决了以上背景技术提出的技术问题。
3、(二)技术方案
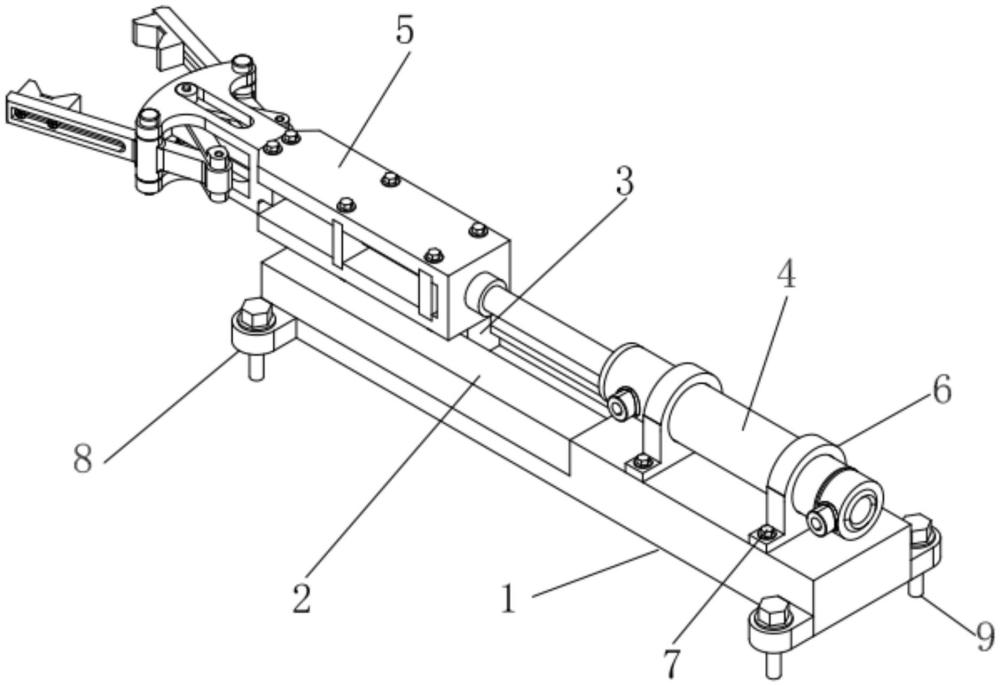
4、为实现上述目的,本实用新型提供如下技术方案:一种辅助夹持机械手,包括底座,所述底座,所述底座的顶部栓接有滑轨,所述滑轨的顶部滑动连接有滑块,所述底座的顶部设置有第一气缸,所述滑块的顶部设置有夹持机构;
5、所述夹持机构包括固定架,所述固定架的一端设置有安装架,所述安装架的内部滑动套设有推杆,所述安装架的内部套设有两个限位轴,所述限位轴的表面套设有夹持杆,所述夹持杆的一端铰接有连杆,所述连杆的另一端套设有连接轴,所述连接轴的表面套接有连接块,所述连接轴的两端均套设有滑轮,所述安装架的顶部与底部均开设有与滑轮相适配的滑槽,所述固定架的内部设置有第二气缸,所述第二气缸的伸缩端与推杆栓接,所述固定架的底部与滑块栓接,所述第一气缸的伸缩端与固定架栓接。
6、优选的,所述夹持杆的一侧设置有夹块,所述夹块的内部螺纹连接有第一螺栓,所述夹持杆的内部开设有与第一螺栓相适配的通槽。
7、优选的,所述第二气缸的表面套接有安装块,所述固定架的顶部与底部均套设有第二螺栓。
8、优选的,所述第二螺栓的一端与安装块栓接,所述固定架的内部开设有与安装块相适配的卡槽。
9、优选的,所述固定架的顶部与底部均套设有第三螺栓,所述第三螺栓的一端与安装架螺纹连接。
10、优选的,所述第一气缸的表面套设有安装套,所述安装套的内部套设有第四螺栓,所述第四螺栓的底部与底座螺纹连接。
11、优选的,所述底座正面与背面的两侧均栓接有固定块,所述固定块的内部套设有第五螺栓。
12、(三)有益效果
13、本实用新型提供了一种辅助夹持机械手。具备以下有益效果:
14、该辅助夹持机械手,使用者可以通过第五螺栓对该装置进行安装,然后启动第一气缸,使第一气缸带动固定架进行移动,随后使固定架带动滑块在滑轨的内部进行滑动,从而能够有效便于对该装置进行移动调节。
15、该辅助夹持机械手,使用者可以启动第二气缸,使第二气缸带动推杆在安装架的内部进行滑动,随后使推杆带动连接块进行移动,使连接块通过连杆带动夹持杆在限位轴的表面进行转动,之后拉动夹块,使夹块带动第一螺栓在通槽的内部进行滑动,同时使第一螺栓对夹块进行限位,然后使夹持杆通过夹块对工件进行夹持,从而能够有效便于对工件进行快速辅助夹持。
技术特征:
1.一种辅助夹持机械手,包括底座(1),其特征在于:所述底座(1),所述底座(1)的顶部栓接有滑轨(2),所述滑轨(2)的顶部滑动连接有滑块(3),所述底座(1)的顶部设置有第一气缸(4),所述滑块(3)的顶部设置有夹持机构(5);
2.根据权利要求1所述的一种辅助夹持机械手,其特征在于:所述夹持杆(505)的一侧设置有夹块(511),所述夹块(511)的内部螺纹连接有第一螺栓(512),所述夹持杆(505)的内部开设有与第一螺栓(512)相适配的通槽(513)。
3.根据权利要求1所述的一种辅助夹持机械手,其特征在于:所述第二气缸(514)的表面套接有安装块(515),所述固定架(501)的顶部与底部均套设有第二螺栓(516)。
4.根据权利要求3所述的一种辅助夹持机械手,其特征在于:所述第二螺栓(516)的一端与安装块(515)栓接,所述固定架(501)的内部开设有与安装块(515)相适配的卡槽(517)。
5.根据权利要求1所述的一种辅助夹持机械手,其特征在于:所述固定架(501)的顶部与底部均套设有第三螺栓(518),所述第三螺栓(518)的一端与安装架(502)螺纹连接。
6.根据权利要求1所述的一种辅助夹持机械手,其特征在于:所述第一气缸(4)的表面套设有安装套(6),所述安装套(6)的内部套设有第四螺栓(7),所述第四螺栓(7)的底部与底座(1)螺纹连接。
7.根据权利要求1所述的一种辅助夹持机械手,其特征在于:所述底座(1)正面与背面的两侧均栓接有固定块(8),所述固定块(8)的内部套设有第五螺栓(9)。
技术总结
本技术公开了一种辅助夹持机械手,包括底座,该辅助夹持机械手,使用者可以通过第五螺栓对该装置进行安装,然后启动第一气缸,使第一气缸带动固定架进行移动,随后使固定架带动滑块在滑轨的内部进行滑动,从而能够有效便于对该装置进行移动调节。该辅助夹持机械手,使用者可以启动第二气缸,使第二气缸带动推杆在安装架的内部进行滑动,随后使推杆带动连接块进行移动,使连接块通过连杆带动夹持杆在限位轴的表面进行转动,之后拉动夹块,使夹块带动第一螺栓在通槽的内部进行滑动,同时使第一螺栓对夹块进行限位,然后使夹持杆通过夹块对工件进行夹持,从而能够有效便于对工件进行快速辅助夹持。
技术研发人员:曹杰
受保护的技术使用者:曹杰
技术研发日:20240726
技术公布日:2025/2/13
- 还没有人留言评论。精彩留言会获得点赞!