可供搬运物件的自动化机器人的制作方法
本发明涉及自动化搬运设备领域,尤其是涉及可供搬运物件的自动化机器人。
背景技术:
1、可供搬运物件的自动化机器人能提高效率、精确度,降低劳动力成本,同时保障工作人员安全,特别是在危险或恶劣环境中。此外,还能释放人力资源,让人们从事更有创造性的工作。
2、授权公告号为cn110921301b的中国发明专利公开了一种可供搬运物件的自动化机器人,该专利依然存在不足之处,如:适用性差,上述专利设备整体呈框形,如果需要搬运物品,物品的四周必须没有障碍物,因此,对其应用造成了影响。此外,无法适用于对不规则物品进行搬运,对搬运物品的形状也有限制。最后,其对物品的夹持形式就一种,无法根据环境、搬运物进行适应性调节,进一步降低了设备的适用性。此外,现有技术中还存在机械式吸盘和气动式吸盘机械手,如公开号为cn117429872a的专利申请,公开了一种电池托盘总成上下料搬运装置,其中采用了机械式吸盘,但是,该装置中由于多个吸盘是相互连通的,因此,只要有一个吸盘未吸附而漏气,则会造成整个装置无法进行吸附工作。又如公开号为cn118753802a的专利申请,公开了一种搬运机构及划片机,采用气动式吸盘或夹爪组件进行工作,为现有技术,但其气动式吸盘和夹爪组件是单独工作的,无法进行配合工作以使得设备适用于多种环境或对多种形状的物体进行搬运。此外,公开号为cn118358995a的专利申请,公开了一种不规则产品镀色用上下料机械手,其中吸盘和夹持两种工作方式也是单独工作的,无法相互配合进行工作。另外,授权公告号为cn222081822u的专利,公开了自动抓取结构。虽然吸附和夹持两种工作方式能够配合工作,但是无法进行状态改变,工作形态依然只有一种,因此其适用性依然有限。
3、为了解决上述问题,实现可供搬运物件的自动化机器人能够在多种环境中以不同的方式对不同形状的物体进行搬运。亟需研发一种具有高适用性的可供搬运物件的自动化机器人。
技术实现思路
1、本发明要解决的技术问题是:如何提高可供搬运物件的自动化机器人适用性,能够适用于多种环境、多种物品、不同形状物品的搬运工作。
2、本发明提供了可供搬运物件的自动化机器人,包括底座,所述底座的上端设有机械臂,所述机械臂前端的转动机构上固定设置有基板,所述基板上设有两个位于同一直线上的横向移动组件,每个所述横向移动组件上均设有转动组件,每个所述转动组件上均设有吸附组件,每个所述吸附组件上均设有夹持组件,所述吸附组件包括安装座,所述安装座与转动组件固定连接,所述安装座内设有移动腔,所述安装座的上端设有第一电动推杆,所述第一电动推杆的输出端延伸至移动腔内,所述移动腔设有连接板,所述连接板的上端与第一电动推杆的输出端固定连接,所述连接板的下端设有多个活塞杆,每个所述活塞杆远离连接板的端部均固定连接有吸附活塞,所述安装座上设有多个与吸附活塞一一对应且滑动配合的吸附孔,所有所述吸附孔的一端均位于安装座的同一侧面上,所述安装座的一侧设有进气接头和抽气接头,所述抽气接头上设有控制阀,每个所述吸附孔与进气接头之间均设有进气通道,每个所述进气通道上均设有用于限制气流仅能从进气接头流向吸附孔的进气单向阀,每个所述吸附孔与抽气接头之间均设有抽气通道,每个所述抽气通道上均设有用于限制气流仅能从吸附孔流向抽气接头的抽气单向阀。
3、进一步,所述横向移动组件包括电缸,所述电缸固定安装在基板上,所述电缸的滑块上设有铰接座,所述电缸的滑块的一侧设有延伸板。
4、进一步,所述转动组件包括铰接头,所述铰接头与铰接座之间通过转轴转动连接,所述延伸板的一侧设有转动电机,所述转动电机的输出端与转轴传动连接,所述铰接头的一端与安装座固定连接。
5、进一步,每个所述吸附孔位于安装座侧面上的端部均设有密封环。
6、进一步,所述密封环的一端从安装座内凸出。
7、进一步,所述夹持组件包括夹持电动推杆、转动杆和连接杆,所述转动杆的两端均设有支撑臂,所述转动杆通过两端的支撑臂与安装座固定连接,所述转动杆上转动连接有多个l型杆,所述l型杆的转弯处与转动杆转动连接,所有所述l型杆的一端均与连接杆固定连接,所述夹持电动推杆转动设置在安装座上,所述夹持电动推杆的输出端与连接杆转动连接。
8、进一步,所述l型杆远离连接杆的一端设有弯曲部,所述弯曲部的弯曲方向为远离l型杆自身夹角的一侧。
9、进一步,所述基板的下端设有多个限位杆,当安装座转动至水平状态时,所述限位杆的下端与安装座的上端抵触。
10、进一步,所述限位杆的下端由弹性材质制成。
11、进一步,所述安装座的下部还设有用于吸附磁性材质物品的电磁铁。
12、本发明的有益效果在于:
13、1、本发明中吸附组件的机械式吸附与气动式吸附结合在一起,实现了共用一套吸附孔进行工作。现有技术中虽然两种模式的吸附设备均存在,但是,两者在工作时的原理是不同的,因此,暂未将两者有效的结合在一起进行工作。其中机械式吸附在工作时需要保证吸附孔与搬运物体之间的完全密封,之后存在在内部形成负压进行工作,而气动式吸附在工作时是需要所有的吸附孔连通在一起的,否则有的吸附孔密封较好,形成负压后需要停止吸气,有的密封较差需要持续形成负压吸附物体,会造成冲突。本发明中通过控制阀、进气单向阀、抽气单向阀等结构的设计,实现了机械式吸附与气动式吸附的结合,使两者共用一套吸附设备进行工作,减少了设备数量,提高了设备的适用性。
14、2、本发明中吸附组件设计了两种工作方式,第一种机械式吸附用于吸附质量较轻,上表面更为光滑的物品,其操作简单,其在工作过程中噪声更少。第二种气动式吸附的方式用于重量较大的物品的搬运,其吸附力更强,但工作过程中噪声更大。使用者可以根据实际情况进行选择,提高了设备的适用性。
15、3、本发明通过横向移动组件、转动组件、吸附组件、夹持组件的配合工作能够有效提高设备的适用性。当对上表面平整的物品(无论四周是否有障碍物)进行搬运,可选择吸附搬运的方式进行工作。当对上表面较为平整的物品进行搬运,但重量可能会超过吸附组件的吸力,可能会存在掉落的风险时,可在选择吸附搬运的同时通过夹持组件对物品的两侧进行夹持,能够提高物品搬运的稳定性,当对上表面形状不规则但四周形状较为规则的物品进行搬运时,可选择翻折吸附组件,通过吸附组件吸附物品的侧面进行搬运,同时也能够通过夹持组件夹持物品的两侧或底部。当对完全不规则的物品进行搬运时,吸附组件翻折后通过夹持组件夹持物品的侧部或底部进行搬运。可见,本发明不仅仅能够改变吸附组件和夹持组件的工作方式还能够改变两者之间的配合方式,有效地提高了设备的适应性,能够适用于多种环境、多种物品、不同形状物品的搬运工作,可让使用者根据实际情况进行选择。
技术特征:
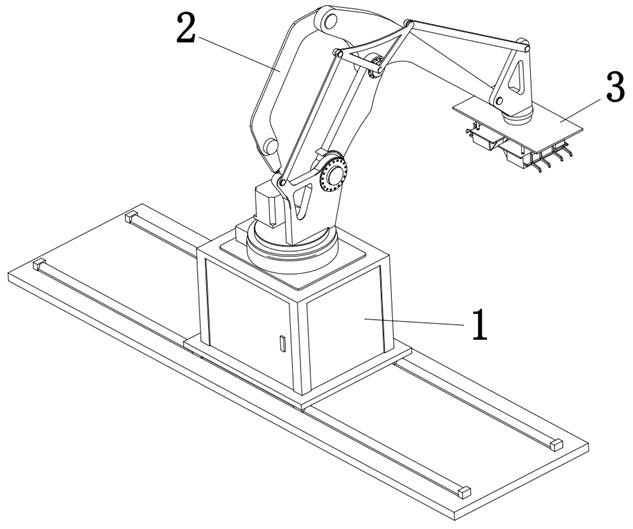
1.可供搬运物件的自动化机器人,包括底座(1),所述底座(1)的上端设有机械臂(2),其特征在于:所述机械臂(2)前端的转动机构上固定设置有基板(3),所述基板(3)上设有两个位于同一直线上的横向移动组件(4),每个所述横向移动组件(4)上均设有转动组件(5),每个所述转动组件(5)上均设有吸附组件(6),每个所述吸附组件(6)上均设有夹持组件(7),所述吸附组件(6)包括安装座(61),所述安装座(61)与转动组件(5)固定连接,所述安装座(61)内设有移动腔(62),所述安装座(61)的上端设有第一电动推杆(63),所述第一电动推杆(63)的输出端延伸至移动腔(62)内,所述移动腔(62)设有连接板(64),所述连接板(64)的上端与第一电动推杆(63)的输出端固定连接,所述连接板(64)的下端设有多个活塞杆(65),每个所述活塞杆(65)远离连接板(64)的端部均固定连接有吸附活塞(66),所述安装座(61)上设有多个与吸附活塞(66)一一对应且滑动配合的吸附孔(67),所有所述吸附孔(67)的一端均位于安装座(61)的同一侧面上,所述安装座(61)的一侧设有进气接头(68)和抽气接头(69),所述抽气接头(69)上设有控制阀(612),每个所述吸附孔(67)与进气接头(68)之间均设有进气通道(610),每个所述进气通道(610)上均设有用于限制气流仅能从进气接头(68)流向吸附孔(67)的进气单向阀(611),每个所述吸附孔(67)与抽气接头(69)之间均设有抽气通道(613),每个所述抽气通道(613)上均设有用于限制气流仅能从吸附孔(67)流向抽气接头(69)的抽气单向阀(614)。
2.根据权利要求1所述的可供搬运物件的自动化机器人,其特征在于:所述横向移动组件(4)包括电缸(41),所述电缸(41)固定安装在基板(3)上,所述电缸(41)的滑块上设有铰接座(42),所述电缸(41)的滑块的一侧设有延伸板(43)。
3.根据权利要求2所述的可供搬运物件的自动化机器人,其特征在于:所述转动组件(5)包括铰接头(51),所述铰接头(51)与铰接座(42)之间通过转轴转动连接,所述延伸板(43)的一侧设有转动电机(52),所述转动电机(52)的输出端与转轴传动连接,所述铰接头(51)的一端与安装座(61)固定连接。
4.根据权利要求1所述的可供搬运物件的自动化机器人,其特征在于:每个所述吸附孔(67)位于安装座(61)侧面上的端部均设有密封环(8)。
5.根据权利要求4所述的可供搬运物件的自动化机器人,其特征在于:所述密封环(8)的一端从安装座(61)内凸出。
6.根据权利要求1所述的可供搬运物件的自动化机器人,其特征在于:所述夹持组件(7)包括夹持电动推杆(71)、转动杆(72)和连接杆(73),所述转动杆(72)的两端均设有支撑臂(74),所述转动杆(72)通过两端的支撑臂(74)与安装座(61)固定连接,所述转动杆(72)上转动连接有多个l型杆(75),所述l型杆(75)的转弯处与转动杆(72)转动连接,所有所述l型杆(75)的一端均与连接杆(73)固定连接,所述夹持电动推杆(71)转动设置在安装座(61)上,所述夹持电动推杆(71)的输出端与连接杆(73)转动连接。
7.根据权利要求6所述的可供搬运物件的自动化机器人,其特征在于:所述l型杆(75)远离连接杆(73)的一端设有弯曲部(9),所述弯曲部(9)的弯曲方向为远离l型杆(75)自身夹角的一侧。
8.根据权利要求1所述的可供搬运物件的自动化机器人,其特征在于:所述基板(3)的下端设有多个限位杆(10),当安装座(61)转动至水平状态时,所述限位杆(10)的下端与安装座(61)的上端抵触。
9.根据权利要求8所述的可供搬运物件的自动化机器人,其特征在于:所述限位杆(10)的下端由弹性材质制成。
10.根据权利要求1所述的可供搬运物件的自动化机器人,其特征在于:所述安装座(61)的下部还设有用于吸附磁性材质物品的电磁铁(11)。
技术总结
本发明涉及自动化搬运设备领域,尤其是涉及可供搬运物件的自动化机器人。包括底座,底座的上端设有机械臂,机械臂前端的转动机构上固定设置有基板,基板上设有两个横向移动组件,每个横向移动组件上均设有转动组件,每个转动组件上均设有吸附组件,每个吸附组件上均设有夹持组件。本发明通过横向移动组件、转动组件、吸附组件、夹持组件的配合工作能够有效提高设备的适用性,能够适用于多种环境、多种物品、不同形状物品的搬运工作,可让使用者根据实际情况进行选择。
技术研发人员:姜厚成,王志钦
受保护的技术使用者:烟台美丰机械集团有限公司
技术研发日:
技术公布日:2025/2/10
- 还没有人留言评论。精彩留言会获得点赞!