一种机器手控制方法、装置和存储介质与流程
本发明涉及机器手控制,特别涉及一种机器手控制方法、装置和存储介质。
背景技术:
1、机器手的运动包含6个自由度,包括5个手指的内收(flex),以及拇指的外展(abduction),采用增量式编码器来记录手指的位置或角度。当机器手由于误触关机键或其他一些原因突然断电时,编码器失去了记忆功能,就丢失了各个手指的位置或角度信息,手指保持最后的姿势不动。现有方法存在复位过程中,在极个别的手势下,多个手指自由度之间可能会存在相互干扰的情况,导致某些自由度手指复位失败的问题。
2、因此,急需一种机器手控制方法解决现有方法在复位过程中,在极个别的手势下,多个手指自由度之间可能会存在相互干扰的情况,导致某些自由度手指复位失败的问题。
技术实现思路
1、本发明提供一种机器手控制方法,旨在解决现有方法在复位过程中,在极个别的手势下,多个手指自由度之间可能会存在相互干扰的情况,导致某些自由度手指复位失败的问题,有效降低了用户在使用过程中损坏手指的风险。
2、为实现上述目的,本发明提出的机器手控制方法,所述机器手包括接受腔、手掌部和手指部,所述手指部包括多个手指机构,每个手指机构具有对应的手指关节,所述手指机构通过电机驱动所述手指关节转动,以使所述手指机构伸展或弯曲,所述方法包括:
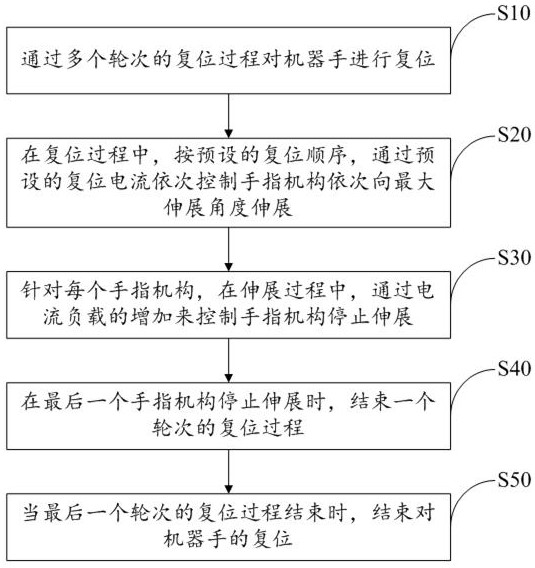
3、通过多个轮次的复位过程对所述机器手进行复位;
4、在所述复位过程中,按预设的复位顺序,通过预设的复位电流依次控制所述手指机构依次向最大伸展角度伸展;
5、针对每个所述手指机构,在伸展过程中,通过电流负载的增加来控制所述手指机构停止伸展;
6、在最后一个所述手指机构停止伸展时,结束一个轮次的所述复位过程;
7、当最后一个轮次的所述复位过程结束时,结束对所述机器手的复位。
8、可选的,在通过多个轮系的复位过程对所述机器手进行复位之前,所述方法还包括:
9、获取所述机器手的历史复位数据和/或历史使用数据;
10、基于所述历史复位数据和/或历史使用数据,确定出所述复位顺序。
11、可选的,所述基于所述历史复位数据和/或历史使用数据没确定出所述复位顺序,包括:
12、基于所述历史复位数据和/或历史使用数据,确定各个所述手指机构的被干扰率;
13、基于所述被干扰率,确定各个所述手指机构的复位优先级,被干扰率越低,则复位优先级越高;
14、将所述复位优先级从高到低的顺序确定为所述复位顺序。
15、可选的,所述基于所述历史复位数据和/或历史使用数据,确定各个所述手指机构的被干扰率,包括:
16、基于所述历史复位数据,确定各个所述手指机构的不同轮次的所述复位过程中的第一被干扰率;
17、基于所述历史使用数据,确定各个所述手指机构在使用过程中的第二被干扰率;
18、基于所述第一杯干扰率和/或所述第二被干扰率,确定各个所述手指机构的被干扰率。
19、可选的,所述基于所述历史复位数据,确定各个所述手指机构在不同轮次的所述复位过程中的第一被干扰率,包括:
20、基于所述历史复位数据,确定各个所述手指机构在不同轮系的所述复位过程中的实际复位角度序列,所述实际复位角度序列包括按轮次先后排序的实际复位角度,每个所述手指机构对应一个所述实际复位角度序列;
21、基于所述实际复位角度序列,确定非零实际复位角度的数量与序位;
22、基于所述非零实际复位角度的数量与序位,确定出所述手指机构在不同轮次的所述复位过程中的第一被干扰率。
23、可选的,所述基于所述历史使用数据,确定各个所述手指机构在使用过程中的第二被干扰率,包括:
24、基于所述历史使用数据,确定各个所述手指机构在使用过程中的伸展数据;
25、基于所述伸展数据,确定各个所述手指机构在使用过程中的第二被干扰率。
26、可选的,所述基于所述第一被干扰率和所述第二被干扰率,确定各个所述手指机构的被干扰率,包括:
27、对所述第一被干扰率进行归一化处理,得到各个所述手指机构的权重值,每个所述手指机构对应一个所述权重值;
28、基于所述权重值,对所述第二被干扰率进行加权处理,得到各个所述手指机构的被干扰率。
29、可选的,所述多个轮次的复位过程中,还包括:
30、在非首个轮次的所述复位过程中,获取所述手指机构在上一个轮次的实际复位角度;
31、若所述上一个轮次的实际复位角度为零,则在本轮次的所述复位过程中,跳过所述手指机构的复位步骤。
32、本发明还提出一种机器手控制装置,所述机器手控制装置包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现上述的机器手控制方法的步骤。
33、本发明还提出一种机器人,所述机器人包括机器手以及机器手控制装置,所述机器手包括多个手指机构,每个手指机构具有对应的手指关节,所述手指机构通过机器手控制装置控制电机驱动所述手指关节转动,以使所述手指机构伸展或弯曲,所述机器手控制装置为本发明实施例所述的机器手控制装置。
34、本发明机器手控制方法的技术方案,通过多个轮次的复位过程对机器手进行复位,在复位过程中,按照预设的复位顺序,通过预设的复位电流依次控制手指机构依次向最大伸展角度伸展,针对每个手指机构,在伸展过程中,通过电流负载的增加来控制手指机构停止伸展;在最后一个手指机构停止伸展时,结束一个轮次的所述复位过程当最后一个轮次的复位过程结束时,结束对机器手的复位,解决了现有方法在复位过程中,在极个别的手势下,多个手指自由度之间可能会存在相互干扰的情况,导致某些自由度手指复位失败的问题,有效降低了用户在使用过程中损坏手指的风险。
技术特征:
1.一种机器手控制方法,其特征在于,所述机器手包括多个手指机构,每个手指机构具有对应的手指关节,所述手指机构通过电机驱动所述手指关节转动,以使所述手指机构伸展或弯曲,所述方法包括:
2.根据权利要求1所述的机器手控制方法,其特征在于,在通过多个轮次的复位过程对所述机器手进行复位之前,所述方法还包括:
3.根据权利要求2所述的机器手控制方法,其特征在于,所述基于所述历史复位数据和/或历史使用数据,确定出所述复位顺序,包括:
4.根据权利要求3所述的机器手控制方法,其特征在于,所述基于所述历史复位数据和/或历史使用数据,确定各个所述手指机构的被干扰率,包括:
5.根据权利要求4所述的机器手控制方法,其特征在于,所述基于所述历史复位数据,确定各个所述手指机构在不同轮次的所述复位过程中的第一被干扰率,包括:
6.根据权利要求4所述的机器手控制方法,其特征在于,基于所述历史使用数据,确定各个所述手指机构在使用过程中的第二被干扰率,包括:
7.根据权利要求6所述的机器手控制方法,其特征在于,所述基于所述第一被干扰率和所述第二被干扰率,确定各个所述手指机构的被干扰率,包括:
8.根据权利要求1至7中任一项所述的机器手控制方法,其特征在于,所述多个轮次的复位过程中,还包括:
9.一种机器手控制装置,其特征在于,所述机器手控制装置包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如权利要求1至8中任一项所述的机器手控制方法的步骤。
10.一种机器人,其特征在于,所述机器人包括机器手以及机器手控制装置,所述机器手包括多个手指机构,每个手指机构具有对应的手指关节,所述手指机构通过机器手控制装置控制电机驱动所述手指关节转动,以使所述手指机构伸展或弯曲,所述机器手控制装置为如权利要求9所述的机器手控制装置。
技术总结
本发明公开一种机器手控制方法、装置和存储介质,该机器手控制方法包括:通过多个轮次的复位过程对所述机器手进行复位;在所述复位过程中,按预设的复位顺序,通过预设的复位电流依次控制所述手指机构依次向最大伸展角度伸展;针对每个所述手指机构,在伸展过程中,通过电流负载的增加来控制所述手指机构停止伸展;在最后一个所述手指机构停止伸展时,结束一个轮次的所述复位过程;当最后一个轮次的所述复位过程结束时,结束对所述机器手的复位。本发明解决了现有方法在复位过程中,在极个别的手势下,多个手指自由度之间可能会存在相互干扰的情况,导致某些自由度手指复位失败的问题,有效降低了用户在使用过程中损坏手指的风险。
技术研发人员:韩璧丞,汪文广,谢高翔
受保护的技术使用者:浙江强脑科技有限公司
技术研发日:
技术公布日:2025/2/17
- 还没有人留言评论。精彩留言会获得点赞!