机器人运动关节的制作方法
本发明涉及运动关节,具体涉及一种机器人运动关节。
背景技术:
1、人形机器人是指具备人类典型特征,能够适应复杂环境并执行多任务作业的机器人产品,是机器人领域的集大成者,其整机研发及零部件攻关将带动上下游产业链快速发展。目前最常见的人形机器人驱动装置是旋转型电驱动关节系统,其本身具有扭矩密度高,结构重量轻等优点,能够有效提升机器人的行动能力。其下肢结构形式一般为在髋关节、大腿和小腿分别布置一组若干个的旋转型驱动电机,大腿和小腿之间、小腿和脚掌之间通过轴承等转动副连接,再通过连杆结构,由不同的电机分别带动大腿、小腿和脚掌结构独立转动。通过特定的运动规划和控制,这组旋转型驱动电机能够实现人形机器人的平衡站立、行走等行为,最大程度模拟人类,甚至做到超越人类的运动能力。
2、人形机器人目前代表产品有智元远征、宇树g1、北京天工,上海青龙等,他们的下肢旋转电机转子输出端与大小腿或者连杆直接相连。在机器人行走过程中,足端触地的反作用力会通过关节连杆传递到旋转电机上,这样的设计会使得来自足端的冲击力直接作用于电机的转子、减速器或者柔轮上面,而机器人运行的恶劣工况会使得触地冲击力无规律且频繁的传递,极大的缩短了旋转电机的使用寿命,增加了使用成本。因此,人形机器人的运动机构有巨大的改进空间,亟需设计一种关节抗冲击结构,在一定程度上隔绝电机与关节的力传导,增加整机抗冲击性和耐用性。
技术实现思路
1、鉴于现有的机器人关节机构不能有效缓冲向驱动电机传递的冲击力,降低了旋转电机的使用寿命的问题,本发明提供一种机器人运动关节。
2、本申请提供一种机器人运动关节,包括固定于基座上的电机,从电机转子悬伸而出的转轴,活动关节固定于转轴上,电机转子运动带动固设于转轴上的活动关节运动;
3、轴承设置于转轴与基座之间,轴承的轴承内圈套设于转轴上,轴承的轴承外圈固定于基座上,轴承能够承受轴承内圈与轴承外圈之间的轴向载荷以及径向载荷。
4、优选地,转轴于轴承内圈的一侧具有周向凸出的限位圈,轴承内圈一侧抵靠限位圈;内挡圈套设于转轴上,并抵接轴承内圈的另一侧。
5、优选地,基座于轴承外圈的一侧形成高出轴承外圈安装面的限位台,轴承外圈一侧抵靠限位台;基座上于轴承外圈的另一侧固定外挡圈。
6、优选地,所述外挡圈面向活动关节的一侧形成有至少一个限位块,在活动关节上形成周向凸出的突出部;在活动关节的转动过程中,突出部与限位块可在转动预设角度时接触从而限制活动关节的转动角度。
7、优选地,所述基座环绕旋转中心至少设置有两个限位块,两限位块之间形成限位空间;在活动关节上形成周向凸出的突出部;在活动关节的转动过程中,突出部的运动范围仅限于限位空间,从而限制活动关节的活动范围。
8、优选地,所述轴承为交叉滚子轴承。
9、本设计的抗冲击关节机构在电机和活动关节之间加入了轴承,轴承将来自活动关节的冲击传递到基座上,避免了电机直接被冲击,解决了机器人运行过程中,电机受到冲击经常损坏的问题,可有效延长电机的运行寿命。
技术特征:
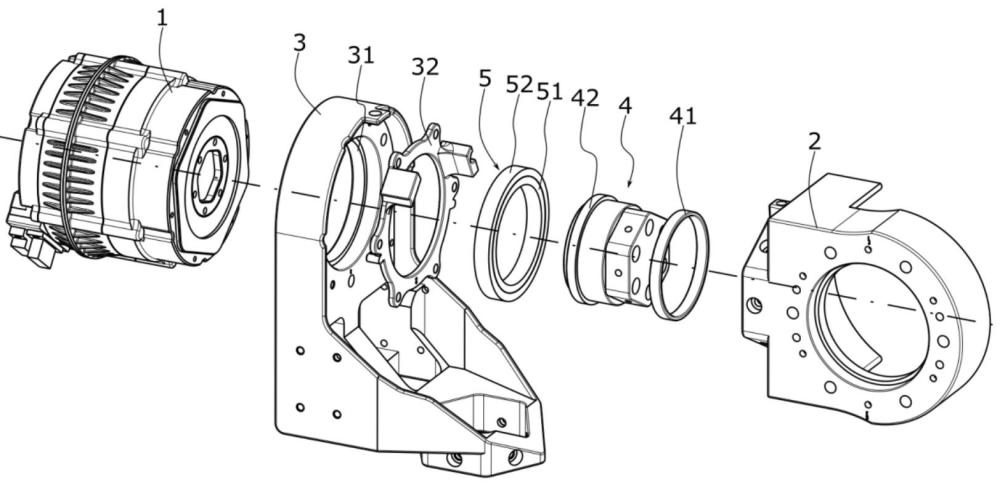
1.一种机器人运动关节,其特征在于,包括固定于基座(3)上的电机(1),从电机转子悬伸而出的转轴(4),活动关节(2)固定于转轴(4)上,电机转子运动带动固设于转轴(4)上的活动关节(2)运动;
2.如权利要求1所述的机器人运动关节,其特征在于,转轴(4)于轴承内圈(51)的一侧具有周向凸出的限位圈(41),轴承内圈(51)一侧抵靠限位圈(41);内挡圈(42)套设于转轴(4)上,并抵接轴承内圈(51)的另一侧。
3.如权利要求1所述的机器人运动关节,其特征在于,基座(3)于轴承外圈(52)的一侧形成高出轴承外圈(52)安装面的限位台(31),轴承外圈(52)一侧抵靠限位台(31);基座(3)上于轴承外圈(52)的另一侧固定外挡圈(32)。
4.如权利要求3所述的机器人运动关节,其特征在于,所述外挡圈(32)面向活动关节(2)的一侧形成有至少一个限位块(321),在活动关节(2)上形成周向凸出的突出部(21);在活动关节(2)的转动过程中,突出部(21)与限位块(321)可在转动预设角度时接触从而限制活动关节(2)的转动角度。
5.如权利要求3所述的机器人运动关节,其特征在于,所述基座(3)环绕旋转中心至少设置有两个限位块(321),两限位块(321)之间形成限位空间(3211);在活动关节(2)上形成周向凸出的突出部(21);在活动关节(2)的转动过程中,突出部(21)的运动范围仅限于限位空间(3211),从而限制活动关节(2)的活动范围。
6.如权利要求1所述的机器人运动关节,其特征在于,所述轴承(5)为交叉滚子轴承。
技术总结
本发明涉及机器人运动关节,包括固定于基座上的电机,从电机转子悬伸而出的转轴,活动关节固定于转轴上,电机转子运动带动固设于转轴上的活动关节运动;轴承设置于转轴与基座之间,轴承的轴承内圈套设于转轴上,轴承的轴承外圈固定于基座上,轴承能够承受轴承内圈与轴承外圈之间的轴向载荷以及径向载荷。本设计的抗冲击关节机构在电机和活动关节之间加入了轴承,轴承将来自活动关节的冲击传递到基座上,避免了电机直接被冲击,解决了机器人运行过程中,电机受到冲击经常损坏的问题,可有效延长电机的运行寿命。
技术研发人员:梁子同,梁斌,刘厚德,梁论飞,周超,叶国阳
受保护的技术使用者:江淮前沿技术协同创新中心
技术研发日:
技术公布日:2025/4/14
- 还没有人留言评论。精彩留言会获得点赞!