一种可以爬坡越障的消防机器人的制作方法
本技术涉及消防机器人,具体为一种可以爬坡越障的消防机器人。
背景技术:
1、随着社会经济的迅猛发展,建筑和企业生产的特殊性,导致化学危险品和放射性物质泄漏以及燃烧、爆炸、坍塌的事故隐患增加,事故发生的概率也相应提高,一旦发生灾害事故,消防员面对高温、黑暗、有毒和浓烟等危害环境时,若没有相应的设备贸然冲进现场,不仅不能完成任务,还会徒增人员伤亡,而消防机器人作为特种消防设备可代替消防队员接近火场实施有效的灭火救援、化学检验和火场侦察等作业,对减少国家财产损失和灭火救援人员的伤亡将产生重要的作用,然而灾害事故现场情况复杂,消防机器人在行走中可能会碰到路障或地面凸起的地方,如果消防机器人选择绕道行驶,不仅浪费时间,而且影响火灾救援的进度,为了能适用于复杂路况的行走要求,现有的消防机器人常使用履带行走机构,来对应对一些较小的障碍,当遇到大障碍时通常是由四角设置的电机或者电动推杆运作通过连杆将消防机器人依次抬起,以此越过较大的障碍物,但这种方式,成本较高,需要多组电机和电动推杆进行配合才能进行爬坡以及越障,对驱动结构的数量较为依赖,且驱动结构装的过多,就会导致消防机器人自身较重,从而影响工作过程中的灵活性,为此,我们提出一种可以爬坡越障的消防机器人。
技术实现思路
1、本实用新型要解决的技术问题是克服现有的缺陷,提供一种可以爬坡越障的消防机器人,使得机器人的爬坡以及越障能力大大提高,而且仅通过一个驱动结构就可以驱动消防机器人进行爬坡以及越障,减少消防机器人对电机数量的依赖,可以有效解决背景技术中的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种可以爬坡越障的消防机器人,包括机壳和越障单元;
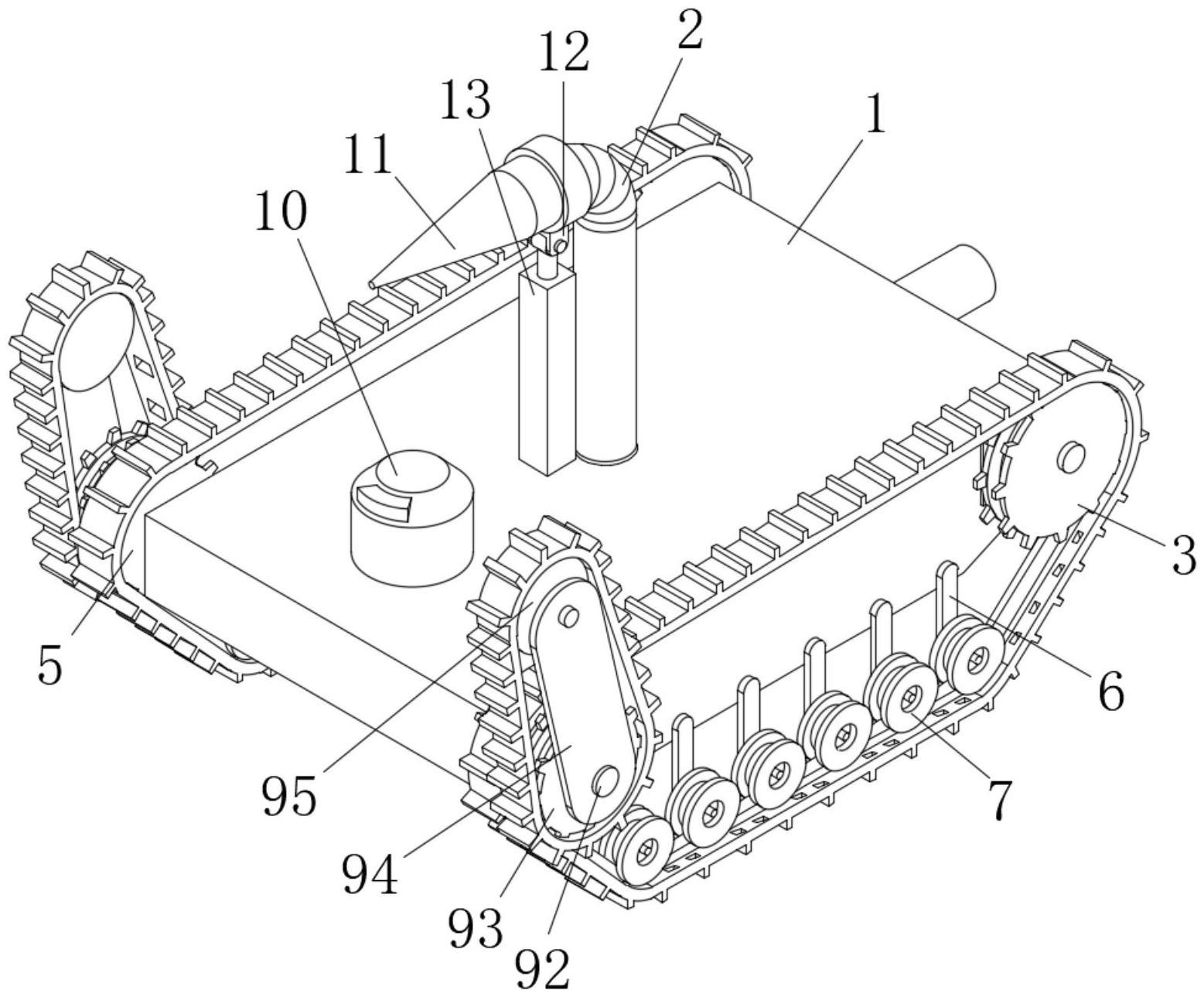
3、机壳:其上表面中部设置的安装口内设有喷水管,喷水管的进水口贯穿机壳的后表面并延伸至外部,喷水管上端设置的波纹管出水口处设有喷嘴,机壳的左右表面后端均通过轴承转动连接有驱动轮,机壳的左右表面前端均通过轴承转动连接有转动筒,转动筒的外弧面外侧端头均设有前导轮,机壳的左右表面下端均设有纵向均匀分布的第一安装板,第一安装板的外表面下端均通过轴承转动连接有支撑行走轮,机壳的内腔后端通过安装座设有横向对称分布的电机一,电机一的输出轴分别与对应的驱动轮内侧端头固定连接,同一竖直平面内的驱动轮、前导轮和支撑行走轮均通过履带一传动连接;
4、越障单元:包括第二安装板、转动杆和装配板,所述第二安装板横向对称设置于机壳的内腔前端,两个第二安装板之间通过轴承转动连接有转动杆,转动杆的左右两端分别穿过转动筒的中部并延伸至外部,转动杆的外弧面左右两端均设有装配板;
5、其中:还包括plc控制器,所述plc控制器设置于机壳的底壁面前端,plc控制器的输入端电连接外部电源,电机一的输入端电连接plc控制器的输出端,使得机器人的爬坡以及越障能力大大提高,而且仅通过一个驱动结构就可以驱动消防机器人进行爬坡以及越障,减少消防机器人对电机数量的依赖。
6、进一步的,所述越障单元还包括主动轮和从动轮,所述主动轮分别设置于转动筒的外弧面外侧端头,装配板的内侧面上端均通过转轴转动连接有从动轮,位于同一竖直平面内的从动轮和主动轮均通过履带二传动连接,达到了快速传动的目的。
7、进一步的,所述越障单元还包括蜗轮、电机二和蜗杆,所述蜗轮设置于转动杆的外弧面中部,机壳的底壁面前端通过装配座设有电机二,电机二的输出轴前端设有蜗杆,蜗杆与蜗轮啮合连接,电机二的输入端电连接plc控制器的输出端,起到了高效驱动的目的。
8、进一步的,所述机壳的上表面前端设有摄像头,摄像头与plc控制器双向电连接,便于工作人员实时观察消防机器人周围的实况环境。
9、进一步的,所述喷嘴的外弧面下端设有连接座,机壳的上表面前端设有电动推杆,电动推杆的伸缩端通过转轴与连接座的内腔转动连接,电动推杆的输入端电连接plc控制器的输出端,增加了灭火的精准程度。
10、进一步的,所述机壳的底壁面后端设有无线数据传输器,无线数据传输器与plc控制器双向电连接,起到无线通讯的作用。
11、进一步的,所述机壳为铝制机壳,提供防护能力的通过时还减轻自身重量。
12、与现有技术相比,本实用新型的有益效果是:本可以爬坡越障的消防机器人,具有以下好处:
13、消防机器人在进入火灾现场后利用摄像头将火灾情况实时进行摄像并同时将拍摄的数据传输给plc控制器,然后plc控制器将数据处理整合后通过无线数据传输器的发射端传输至后台,便于工作人员实时观察消防机器人周围的实况环境,在消防机器人行进的过程中,若是遇到斜坡亦或是障碍物时,消防员通过遥控器和无线数据传输器建立的无线通讯发出操作指令,plc控制器接收到操作指令后即可调控电机二运作,电机二输出轴旋转带动蜗杆同步转动,蜗杆则通过与之啮合连接的蜗轮带动转动杆、装配板和从动轮同步摆动,在履带二摆动的过程中会与障碍物接触,且在接触后抵在障碍物的上,以此将消防机器人的前端抬起,由于前导轮在转动的同时带动主动轮同步转动,主动轮则通过履带二带动从动轮同步转动,从而在将消防机器人前端被抬起的同时提供向前的动力,以此越过障碍物,从而使得机器人的爬坡以及越障能力大大提高,而且仅通过一个驱动结构就可以驱动消防机器人进行爬坡以及越障,减少消防机器人对电机数量的依赖。
技术特征:
1.一种可以爬坡越障的消防机器人,其特征在于:包括机壳(1)和越障单元(9);
2.根据权利要求1所述的一种可以爬坡越障的消防机器人,其特征在于:所述越障单元(9)还包括主动轮(94)和从动轮(95),所述主动轮(94)分别设置于转动筒(4)的外弧面外侧端头,装配板(93)的内侧面上端均通过转轴转动连接有从动轮(95),位于同一竖直平面内的从动轮(95)和主动轮(94)均通过履带二传动连接。
3.根据权利要求1所述的一种可以爬坡越障的消防机器人,其特征在于:所述越障单元(9)还包括蜗轮(96)、电机二(97)和蜗杆(98),所述蜗轮(96)设置于转动杆(92)的外弧面中部,机壳(1)的底壁面前端通过装配座设有电机二(97),电机二(97)的输出轴前端设有蜗杆(98),蜗杆(98)与蜗轮(96)啮合连接,电机二(97)的输入端电连接plc控制器(15)的输出端。
4.根据权利要求1所述的一种可以爬坡越障的消防机器人,其特征在于:所述机壳(1)的上表面前端设有摄像头(10),摄像头(10)与plc控制器(15)双向电连接。
5.根据权利要求1所述的一种可以爬坡越障的消防机器人,其特征在于:所述喷嘴(11)的外弧面下端设有连接座(12),机壳(1)的上表面前端设有电动推杆(13),电动推杆(13)的伸缩端通过转轴与连接座(12)的内腔转动连接,电动推杆(13)的输入端电连接plc控制器(15)的输出端。
6.根据权利要求1所述的一种可以爬坡越障的消防机器人,其特征在于:所述机壳(1)的底壁面后端设有无线数据传输器(14),无线数据传输器(14)与plc控制器(15)双向电连接。
7.根据权利要求1所述的一种可以爬坡越障的消防机器人,其特征在于:所述机壳(1)为铝制机壳。
技术总结
本技术公开了一种可以爬坡越障的消防机器人,包括机壳和越障单元;机壳:其上表面中部设置的安装口内设有喷水管,喷水管的进水口贯穿机壳的后表面并延伸至外部,喷水管上端设置的波纹管出水口处设有喷嘴,机壳的左右表面后端均通过轴承转动连接有驱动轮,机壳的左右表面前端均通过轴承转动连接有转动筒,转动筒的外弧面外侧端头均设有前导轮,机壳的左右表面下端均设有纵向均匀分布的第一安装板,第一安装板的外表面下端均通过轴承转动连接有支撑行走轮,机壳的内腔后端通过安装座设有横向对称分布的电机一,该可以爬坡越障的消防机器人,使得机器人的爬坡以及越障能力大大提高,减少消防机器人对电机数量的依赖。
技术研发人员:梁午昶
受保护的技术使用者:安翼机器人(江苏)有限公司
技术研发日:20220930
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!