一种交互型拆弹机器人的制作方法
本技术涉及拆弹领域,具体是指一种交互型拆弹机器人。
背景技术:
1、拆弹机器人是一种可以遥控操作进行拆除炸弹的机器人。因为操作人员利用遥控拆弹,令人员能够远离怀疑爆炸品进行拆弹工作,可减少炸弹一旦爆炸引起的人员伤亡,常用的拆弹机器人如公开号为cn217552402u的一种室内拆弹机器人,包括车身,所述车身上设有元件安装板,所述元件安装板上设有控制元件,所述元件安装板一端设有机械臂安装座,所述车身下方设有四个履带轮安装座,其中两个所述履带轮安装座一侧设有履带轮电机,所述履带轮安装座另一侧设有主动履带轮,所述主动履带轮远离履带轮安装座一侧设有越障履带主动轮,另外两个所述履带轮安装座一侧设有从动履带轮,该拆弹机器人上没有设有能够灭火的结构,在较为干燥的环境中作业时,一旦发生爆炸,极易引发火灾,进一步加大损失,在对炸弹进行拆卸的过程总,需要拆弹专员输入一定的指令来达到拆弹的目的,在时间较为紧迫的情况下,手动输入指令的方式耗时较长,不利于快速拆弹。
技术实现思路
1、本实用新型要解决的技术问题是提供一种可进行一定的折叠收纳占用空间较小以便于拆弹人员携带、交互性强、拆弹时无需手动输入指令以达到快速拆弹目的的交互型拆弹机器人。
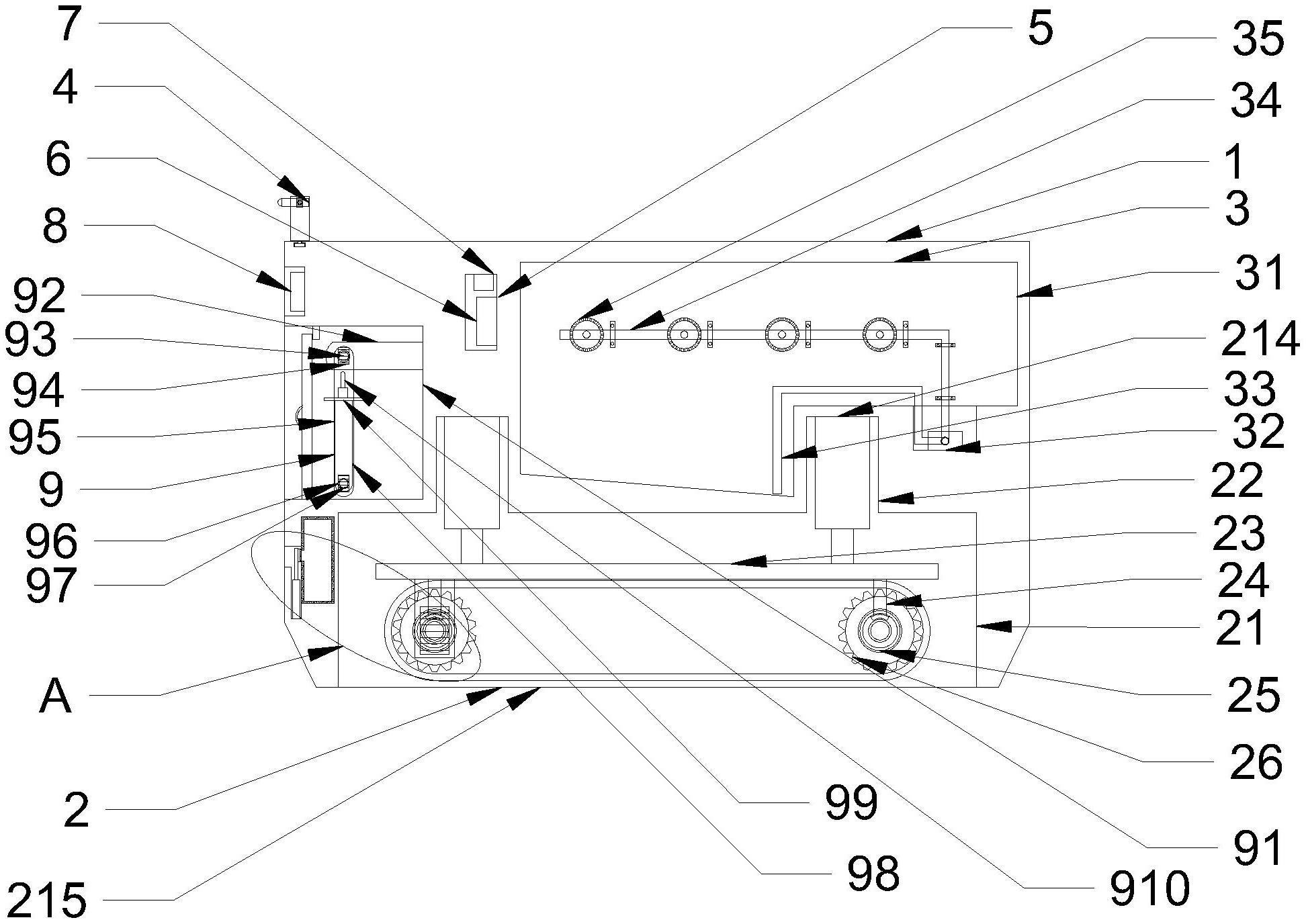
2、本实用新型所采用的技术方案为:一种交互型拆弹机器人,包括主体、第一灭火结构、第二灭火结构、交互手套、运动结构和拆弹结构,其特征在于:所述主体上设有运动结构,所述运动结构上方设有第一灭火结构,所述第一灭火结构一侧设有控制槽,所述控制槽内设有中央控制器,所述中央控制器上方设有信号接收器,所述主体顶部设有监控结构,所述主体侧壁上嵌设有烟雾传感器,所述烟雾传感器下方设有拆弹结构,所述拆弹结构下方设有第二灭火结构。
3、所述拆弹结构包括设置在主体侧壁上的放置槽,所述放置槽侧壁上设有第一机械臂,所述第一机械臂一端侧壁上设有电机a,所述电机a输出端设有贯穿第一机械臂的传动轴a,所述传动轴a上套设u形臂,所述u形臂一端侧壁上设有电机b,所述电机b输出端设有贯穿u形臂的传动轴b,所述传动轴b上套设有第二机械臂,所述第二机械臂上设有旋转盘,所述旋转盘上设有机械手。
4、作为本实用新型进一步的方案:
5、作为本实用新型进一步的方案:所述交互手套包括掌套和指套,所述掌套上设有信号发射器,所述指套顶壁上设有感应槽a,所述感应槽a内设有压力传感器a,所述指套底壁上设有感应槽b,所述感应槽b内设有压力传感器b。
6、作为本实用新型进一步的方案:所述第二灭火结构包括设置在主体侧壁上的第二灭火槽,所述第二灭火槽一侧设有活动槽,所述活动槽底壁上设有气缸a,所述气缸a输出端设有活动柱,所述活动柱侧壁上设有密封板,所述密封板侧壁盒第二灭火槽侧壁上均设有隔温层。
7、作为本实用新型进一步的方案:所述运动结构包括设置在第二灭火结构一侧的收纳槽,所述收纳槽顶部设有多个调节槽,所述调节槽内设有气缸b,所述气缸b输出端设有调节板,所述调节板底壁上设有连接柱a,所述连接柱a一侧设有固定板,所述固定板侧壁上设有电机c,所述电机c输出端设有转轴a,所述转轴a两端均套设有齿轮a,所述调节板远离连接柱a的一侧底部设有连接柱b,所述连接柱b下方设有转轴b,所述转轴b两端均套设有齿轮b,所述齿轮a与齿轮b之间设有履带,所述连接柱a和连接柱b底部均设有连接块,所述转轴a和转轴b上均设有供连接块滑动的滑槽。
8、作为本实用新型进一步的方案:所述第一灭火结构包括设置在运动结构上方的储水槽,所述储水槽底部设有抽水机,所述抽水机,所述抽水机抽水端设有贯穿储水槽底壁的抽水管,所述抽水机输出端设有洒水管,所述洒水管上设有若干个喷嘴。
9、作为本实用新型进一步的方案:所述第二灭火槽侧壁上设有灭火口。
10、作为本实用新型进一步的方案:所述洒水管与主体侧壁之间固定连接。
11、作为本实用新型进一步的方案:所述喷嘴侧壁上设有洒水孔。
12、作为本实用新型进一步的方案:所述监控结构设有与之信号连接的显示屏。
13、作为本实用新型进一步的方案:所述中央控制器设有与之相匹配的遥控器。
14、与现有技术相比,本实用新型有益效果:
15、本实用新型通过设有第一灭火结构和第二灭火结构,在烟雾传感器检测到烟雾时向中央控制器发送灭火信号启动第一灭火结构和第二灭火结构可对爆炸源进行降温并对周边火势进行扑灭,避免火势蔓延加大损失和伤害。
16、本实用新型通过设有交互手套,拆弹人员在进行拆弹时穿戴交互手套,在信号发射器、信号接收器、中央控制器、压力传感器a、压力传感器b的共同作用下,可实现拆弹人员与拆弹机器人之间的交互,无需拆弹人员手动输入指令,简化了拆弹的操作,提高了拆弹的效率。
技术特征:
1.一种交互型拆弹机器人,包括主体(1)、第一灭火结构(3)、第二灭火结构(10)、交互手套(12)、运动结构(2)和拆弹结构(9),其特征在于:所述主体(1)上设有运动结构(2),所述运动结构(2)上方设有第一灭火结构(3),所述第一灭火结构(3)一侧设有控制槽(5),所述控制槽(5)内设有中央控制器(6),所述中央控制器(6)上方设有信号接收器(7),所述主体(1)顶部设有监控结构(4),所述主体(1)侧壁上嵌设有烟雾传感器(8),所述烟雾传感器(8)下方设有拆弹结构(9),所述拆弹结构(9)下方设有第二灭火结构(10);
2.根据权利要求1所述的一种交互型拆弹机器人,其特征在于:所述交互手套(12)包括掌套(122)和指套(121),所述掌套(122)上设有信号发射器(13),所述指套(121)顶壁上设有感应槽a(14),所述感应槽a(14)内设有压力传感器a(16),所述指套(121)底壁上设有感应槽b(15),所述感应槽b(15)内设有压力传感器b(17)。
3.根据权利要求1所述的一种交互型拆弹机器人,其特征在于:所述第二灭火结构(10)包括设置在主体(1)侧壁上的第二灭火槽(101),所述第二灭火槽(101)一侧设有活动槽(102),所述活动槽(102)底壁上设有气缸a(103),所述气缸a(103)输出端设有活动柱(104),所述活动柱(104)侧壁上设有密封板(105),所述密封板(105)侧壁盒第二灭火槽(101)侧壁上均设有隔温层(11)。
4.根据权利要求1所述的一种交互型拆弹机器人,其特征在于:所述运动结构(2)包括设置在第二灭火结构(10)一侧的收纳槽(21),所述收纳槽(21)顶部设有多个调节槽(22),所述调节槽(22)内设有气缸b(214),所述气缸b(214)输出端设有调节板(23),所述调节板(23)底壁上设有连接柱a(29),所述连接柱a(29)一侧设有固定板(212),所述固定板(212)侧壁上设有电机c(213),所述电机c(213)输出端设有转轴a(27),所述转轴a(27)两端均套设有齿轮a(28),所述调节板(23)远离连接柱a(29)的一侧底部设有连接柱b(24),所述连接柱b(24)下方设有转轴b(25),所述转轴b(25)两端均套设有齿轮b(26),所述齿轮a(28)与齿轮b(26)之间设有履带(215),所述连接柱a(29)和连接柱b(24)底部均设有连接块(211),所述转轴a(27)和转轴b(25)上均设有供连接块(211)滑动的滑槽(210)。
5.根据权利要求1所述的一种交互型拆弹机器人,其特征在于:所述第一灭火结构(3)包括设置在运动结构(2)上方的储水槽(31),所述储水槽(31)底部设有抽水机(32),所述抽水机(32),所述抽水机(32)抽水端设有贯穿储水槽(31)底壁的抽水管(33),所述抽水机(32)输出端设有洒水管(34),所述洒水管(34)上设有若干个喷嘴(35)。
6.根据权利要求3所述的一种交互型拆弹机器人,其特征在于:所述第二灭火槽(101)侧壁上设有灭火口。
7.根据权利要求5所述的一种交互型拆弹机器人,其特征在于:所述洒水管(34)与主体(1)侧壁之间固定连接。
8.根据权利要求5所述的一种交互型拆弹机器人,其特征在于:所述喷嘴(35)侧壁上设有洒水孔。
技术总结
本技术涉及拆弹领域,具体是指一种交互型拆弹机器人。一种交互型拆弹机器人,包括主体、第一灭火结构、第二灭火结构、交互手套、运动结构和拆弹结构,主体上有运动结构,运动结构上方有第一灭火结构,第一灭火结构一侧有控制槽,控制槽内有中央控制器,中央控制器上方有信号接收器,主体顶部有监控结构,主体侧壁上嵌有烟雾传感器,烟雾传感器下方有拆弹结构,拆弹结构下方有第二灭火结构。本技术要解决的技术问题是提供一种可进行一定的折叠收纳占用空间较小以便于拆弹人员携带、交互性强、拆弹时无需手动输入指令以达到快速拆弹目的的交互型拆弹机器人。
技术研发人员:王斌,陈青,余健,郑海滨,许博文
受保护的技术使用者:中国人民解放军32272部队51分队
技术研发日:20221202
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!