一种基于多机器人协同的自动灭火系统的制作方法
本申请涉及消防灭火的领域,尤其是涉及一种基于多机器人协同的自动灭火系统。
背景技术:
1、在高压电站、压气站等场景,消防是其重要环节。目前消防机器人大多靠人工控制,需要工作人员具有较高的操作经验。且在人工发现火情的情况下才能到达现场,可能存在滞后性。
技术实现思路
1、有鉴于此,本申请提供一种基于多机器人协同的自动灭火系统,解决了现有技术中的问题,提高灭火效率。
2、本申请提供的一种基于多机器人协同的自动灭火系统采用如下的技术方案:
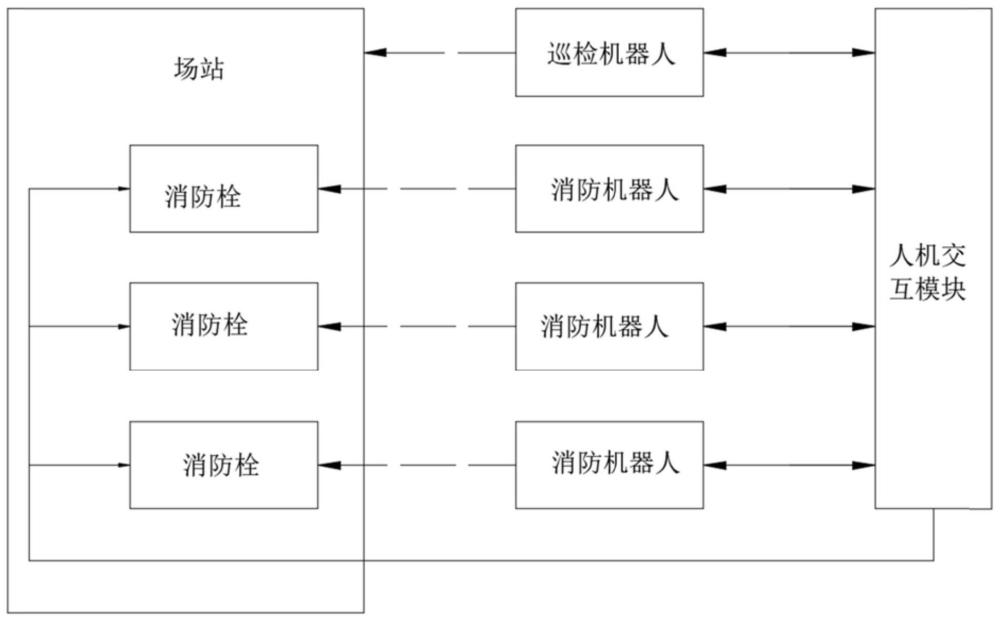
3、一种基于多机器人协同的自动灭火系统,包括巡检机器人、多辆消防机器人、人机交互模块和安装在消防栓上的水带对接装置;
4、巡检机器人按照预设路径对场站进行定时自动巡检,识别火情并将火情信息发送至人机交互模块;
5、消防机器人搭载自主导航系统,消防机器人收到巡检机器人发送的着火点信息和灭火路径信息,消防机器人在自主导航系统的控制下,根据灭火路径行驶至消防栓与水带对接装置进行对接,消防机器人拖动水带行驶至灭火点,消防机器人调整水炮姿态对准着火点;
6、人机交互模块将巡检机器人、消防机器人拍摄画面实时显示,并显示巡检机器人消防机器人的位置和运行状态,所述述人机交互模块显示火情信息。
7、可选的,所述人机交互模块还包括数据库和处理器,所述数据库用于保存不同火情的应对处理方案,所述处理器根据火情地点、应对方案、现场实际情况和调度算法得到处理决策,所述述人机交互模块显示处理决策,通过在人机交互模块上选择处理决策控制是否出动消防机器人和是否打开消防栓的开关。
8、可选的,所述巡检机器人包括第一机器人底盘、第一导航控制器、第一三维激光雷达、第一惯性测量单元和双光云台;第一三维激光雷达,所述第一惯性测量单元和第一机器人底盘的里程计用于感知环境信息及车体位姿信息,所述第一导航控制器接收环境信息及车体自身信息实现巡检机器人自主导航,所述第一导航控制器控制第一机器人底盘按预定巡检路径自主运行;所述双光云台对周围环境进行红外高温检测,并对温度超过预设值的位置点进行跟踪。
9、可选的,所述第一导航控制器根据双光云台的角度信息和车体位姿信息通过三角定位算法计算火点位置。
10、可选的,所述消防机器人包括第二机器人底盘、第二导航控制器、第二三维激光雷达、第二惯性测量单元;所述第二三维激光雷达、第二惯性测量单元、第二机器人底盘的里程计用于感知环境信息及车体位姿信息,所述第二导航控制器接收环境信息及车体位姿信息实现消防机器人自主导航,所述第二导航控制器控制第二机器人底盘按照巡检机器人分配的路径进行自主运行。
11、可选的,所述消防机器人还包括消防水带对接控制系统和水阀控制系统,所述消防水带对接控制系统用于和水带对接装置通信,控制消防水带对接过程,水阀控制系统用于在到达灭火点后接收人机交互模块的控制指令以控制消防栓的开关。
12、综上所述,本申请包括以下有益技术效果:
13、本申请提出了由巡检机器人侦查,系统处理器给出最佳方案,多辆消防机器人联动自动到达灭火点进行灭火的查打一体灭火系统及方法。有效解决目前消防机器人大多靠人工控制,需要工作人员具有较高的操作经验,且在人工发现火情的情况下才能到达现场,存在滞后性的问题。
14、本申请的系统根据实时现场情况及数据库内的预存方案,计算最佳解决方案;并将路径信息下发至每辆消防机器人;消防机器人自主导航至水带对接点,自主对接消防水带,拖动水带自主行驶至最佳灭火位置,进行自动灭火。人机交互模块对多车传感器实时画面及系统状态进行显示,可提供及时的人为干预,提高系统可用性。
技术特征:
1.一种基于多机器人协同的自动灭火系统,其特征在于,包括巡检机器人、多辆消防机器人、人机交互模块和安装在消防栓上的水带对接装置;
2.根据权利要求1所述的基于多机器人协同的自动灭火系统,其特征在于,所述人机交互模块还包括数据库和处理器,所述数据库用于保存不同火情的应对处理方案,所述处理器根据火情地点、应对方案、现场实际情况和调度算法得到处理决策,所述述人机交互模块显示处理决策,通过在人机交互模块上选择处理决策控制是否出动消防机器人和是否打开消防栓的开关。
3.根据权利要求1所述的基于多机器人协同的自动灭火系统,其特征在于,所述巡检机器人包括第一机器人底盘、第一导航控制器、第一三维激光雷达、第一惯性测量单元和双光云台;第一三维激光雷达,所述第一惯性测量单元和第一机器人底盘的里程计用于感知环境信息及车体位姿信息,所述第一导航控制器接收环境信息及车体自身信息实现巡检机器人自主导航,所述第一导航控制器控制第一机器人底盘按预定巡检路径自主运行;所述双光云台对周围环境进行红外高温检测,并对温度超过预设值的位置点进行跟踪。
4.根据权利要求2所述的基于多机器人协同的自动灭火系统,其特征在于,所述第一导航控制器根据双光云台的角度信息和车体位姿信息通过三角定位算法计算火点位置。
5.根据权利要求2所述的基于多机器人协同的自动灭火系统,其特征在于,所述消防机器人包括第二机器人底盘、第二导航控制器、第二三维激光雷达、第二惯性测量单元;所述第二三维激光雷达、第二惯性测量单元、第二机器人底盘的里程计用于感知环境信息及车体位姿信息,所述第二导航控制器接收环境信息及车体位姿信息实现消防机器人自主导航,所述第二导航控制器控制第二机器人底盘按照巡检机器人分配的路径进行自主运行。
6.根据权利要求5所述的基于多机器人协同的自动灭火系统,其特征在于,所述消防机器人还包括消防水带对接控制系统和水阀控制系统,所述消防水带对接控制系统用于和水带对接装置通信,控制消防水带对接过程,水阀控制系统用于在到达灭火点后接收人机交互模块的控制指令以控制消防栓的开关。
技术总结
本申请提供了一种基于多机器人协同的自动灭火系统,属于消防灭火的技术领域,具体包括巡检机器人按照预设路径对场站进行定时自动巡检,识别火情并将火情信息发送至人机交互模块;消防机器人搭载自主导航系统,消防机器人收到巡检机器人发送的着火点信息和灭火路径信息,消防机器人在自主导航系统的控制下,根据灭火路径行驶至消防栓与水带对接装置进行对接,消防机器人拖动水带行驶至灭火点,消防机器人调整水炮姿态对准着火点;人机交互模块将巡检机器人、消防机器人拍摄画面实时显示,并显示巡检机器人消防机器人的位置和运行状态,所述述人机交互模块显示火情信息。通过本申请的处理方案,提高了灭火效率。
技术研发人员:徐文菁,卢光旭,王元鹏,邱夏夷,孙策,张红洛
受保护的技术使用者:中国航空工业集团公司洛阳电光设备研究所
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!