一种智能配电房用智能机器人的制作方法
本技术涉及配电,具体涉及一种智能配电房用智能机器人。
背景技术:
1、随着社会智能科技的发展与进步,使机器人在消防方面也得到了广泛的使用,配电房这种常年运转且易燃物集中的环境里配备一个灭火机器人非常有必要。
2、灭火机器人在实际灭火工作中,在定位到火源位置后,大量集中喷射干粉,产生的后坐力比较大,而现有的灭火机器人本身体积也比较小,所以在反作用力的影响下,比较容易产生偏斜,造成干粉喷洒位置不集中,灭火效率下降的问题。
技术实现思路
1、本实用新型所要解决的技术问题是提供一种智能配电房用智能机器人,旨在解决现有技术中的问题。
2、本实用新型解决上述技术问题的技术方案如下:
3、一种智能配电房用智能机器人,包括机器人本体、灭火器和定位器,所述灭火器安装在所述机器人本体上;所述定位器包括吸附组件和插入组件,所述吸附组件安装在所述机器人本体上,用于在灭火时吸附住地面;所述插入组件安装在所述机器人本体上,用于在灭火时插入地面以下。
4、本实用新型的有益效果是:作业过程中,可通过机器人本体在配电房附近巡查,保证配电房安全运行;
5、当发现火情时,机器人本体可带动灭火器移动至火情点进行灭火处理,灭火方便,安全可靠;
6、在灭火的过程中,由于灭火器会喷射灭火干粉对机器人本体产生较大的后坐力而使得机器人本体发生偏移,因此可通过吸附组件和/或插入组件对机器人本体进行加固,提高机器人本体的稳定性,保证灭火的质量。
7、需要说明的时,当配电房附近为水泥地面时,此时可通过吸附组件吸附住地面,插入组件暂时不工作;当配电房附近为土质地面时,此时插入组件可插入地面以下,以固定住机器人。
8、本实用新型结构简单,设计合理,可实现配电房的巡查,当发现火情时可进行灭火,且其稳定性较佳,保证灭火的效果。
9、在上述技术方案的基础上,本实用新型还可以做如下改进。
10、进一步,所述插入组件包括插入气缸和插入叉,所述插入气缸固定安装在所述机器人本体上,其伸缩端竖直向下;所述插入叉固定安装在所述插入气缸上,所述插入气缸伸缩并带动所述插入叉上下移动。
11、采用上述进一步方案的有益效果是作业过程中,通过插入气缸伸缩并带动插入叉上下移动,以提高机器人在灭火时的稳定性,从而提高灭火质量。
12、进一步,所述插入叉呈环形叉状结构,所述吸附组件位于所述插入叉内。
13、采用上述进一步方案的有益效果是插入叉的形状设计合理,既可以插入地面以下,又不会影响吸附组件的作业。
14、进一步,所述吸附组件包括吸附气缸和吸盘,所述吸附气缸固定安装在所述机器人本体上,其伸缩端竖直向下延伸;所述吸盘固定安装在所述吸附气缸的伸缩端上,所述吸附气缸伸缩并带动所述吸盘上下移动。
15、采用上述进一步方案的有益效果是作业过程中,通过吸附气缸伸缩并带动吸盘上下移动,以提高机器人在灭火时的稳定性,从而提高灭火质量。
16、进一步,所述吸附组件还包括真空机,所述真空机固定安装在所述机器人本体上,其通过真空管路与所述吸盘连通,所述真空管路上固定安装有真空阀。
17、采用上述进一步方案的有益效果是作业过程中,通过真空机对吸盘进行抽真空处理,以便吸盘吸附住地面;另外,可开启或关闭真空阀,以便使得吸盘吸附住地面或与地面分离。
18、进一步,还包括控制器,所述机器人本体上固定安装有避障器,所述避障器、所述灭火器和所述机器人本体分别与所述控制器通讯连接。
19、采用上述进一步方案的有益效果是作业过程中,通过避障器检测机器人前方是否有故障物,并将对应的信号发送给控制器,控制器接收对应的信号并判断分析;
20、当出现故障物时,此时控制器可控制机器人进行转向,精准避让故障物。
21、进一步,所述避障器为红外避障传感器。
22、采用上述进一步方案的有益效果是红外避障传感器设计合理,精确度高,保证机器人安全行驶。
23、进一步,所述机器人本体上还固定安装有烟雾传感器,所述烟雾传感器与所述控制器通讯连接。
24、采用上述进一步方案的有益效果是作业过程中,通过烟雾传感器检测配电房附近是否存在烟雾,并将对应的信号发送给控制器,控制器接收对应的信号并判断分析;
25、当发现火情时,此时控制器可控制器机器人移动至火情处,并控制灭火器及时进行灭火作业,保证配电房的安全运行。
26、进一步,所述机器人本体上还固定安装有摄像头,所述摄像头与所述控制器通讯连接。
27、采用上述进一步方案的有益效果是作业过程中,通过摄像头采集配电房的图像,并将图像发送给控制器,控制器接收对应的图像并判断分析;
28、当发现火情时,此时控制器可控制器机器人移动至火情处,并控制灭火器及时进行灭火作业,进一步保证配电房的安全运行。
29、进一步,所述灭火器水平转动的安装在所述机器人本体的顶部,所述吸附组件和所述插入组件分别安装在所述机器人本体的底部。
30、采用上述进一步方案的有益效果是结构简单,灭火器以及吸附组件和插入组件的位置设置合理,作业更加方便。
技术特征:
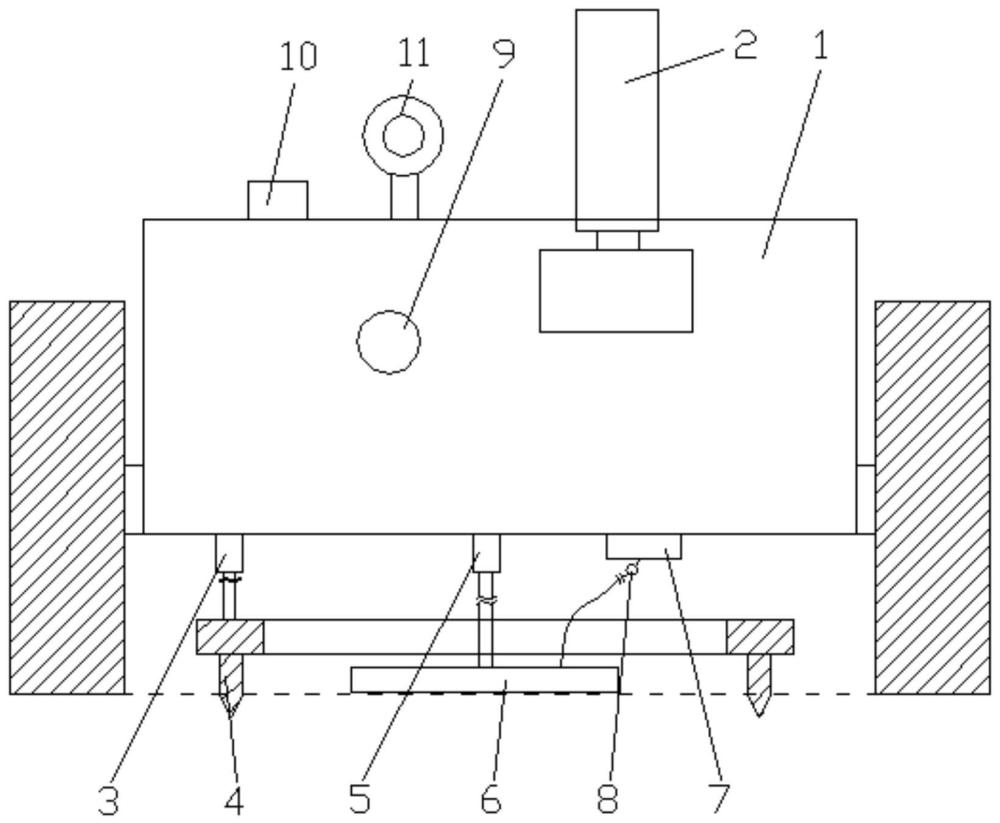
1.一种智能配电房用智能机器人,其特征在于:包括机器人本体(1)、灭火器(2)和定位器,所述灭火器(2)安装在所述机器人本体(1)上;所述定位器包括吸附组件和插入组件,所述吸附组件安装在所述机器人本体(1)上,用于在灭火时吸附住地面;所述插入组件安装在所述机器人本体(1)上,用于在灭火时插入地面以下;
2.根据权利要求1所述的智能配电房用智能机器人,其特征在于:所述插入叉(4)呈环形叉状结构,所述吸附组件位于所述插入叉(4)内。
3.根据权利要求1所述的智能配电房用智能机器人,其特征在于:所述吸附组件还包括真空机(7),所述真空机(7)固定安装在所述机器人本体(1)上,其通过真空管路与所述吸盘(6)连通,所述真空管路上固定安装有真空阀(8)。
4.根据权利要求1-2任一项所述的智能配电房用智能机器人,其特征在于:还包括控制器,所述机器人本体(1)上固定安装有避障器(9),所述避障器(9)、所述灭火器(2)和所述机器人本体(1)分别与所述控制器通讯连接。
5.根据权利要求4所述的智能配电房用智能机器人,其特征在于:所述避障器(9)为红外避障传感器。
6.根据权利要求4所述的智能配电房用智能机器人,其特征在于:所述机器人本体(1)上还固定安装有烟雾传感器(10),所述烟雾传感器(10)与所述控制器通讯连接。
7.根据权利要求4所述的智能配电房用智能机器人,其特征在于:所述机器人本体(1)上还固定安装有摄像头(11),所述摄像头(11)与所述控制器通讯连接。
8.根据权利要求1-2任一项所述的智能配电房用智能机器人,其特征在于:所述灭火器(2)水平转动的安装在所述机器人本体(1)的顶部,所述吸附组件和所述插入组件分别安装在所述机器人本体(1)的底部。
技术总结
本技术涉及一种智能配电房用智能机器人,包括机器人本体、灭火器和定位器,灭火器安装在机器人本体上;定位器包括吸附组件和插入组件,吸附组件安装在机器人本体上,用于在灭火时吸附住地面;插入组件安装在机器人本体上,用于在灭火时插入地面以下。本技术的有益效果是结构简单,设计合理,可实现配电房的巡查,当发现火情时可进行灭火,且其稳定性较佳,保证灭火的效果。
技术研发人员:王建华,王玉好
受保护的技术使用者:武汉大盛源工程有限公司
技术研发日:20230718
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!