印刷方法、末端执行器以及机器人系统与流程
本发明涉及印刷方法、末端执行器以及机器人系统。
背景技术:
1、例如,在专利文献1中记载了一种机器人系统,在机器人的臂部安装喷墨印刷头,在对象物上进行印刷。该机器人系统通过利用压电平台使喷墨印刷头向与印刷方向正交的方向移动来校正印刷轨道的偏移。
2、专利文献1:日本特开2013-202781号公报
3、然而,专利文献1所记载的机器人系统由于对印刷方向的偏移进行校正的校正量小,因此压电平台的移动量也小。因而,存在压电平台内的线性导轨的滚珠产生微动磨损,导致校正精度降低的问题。
技术实现思路
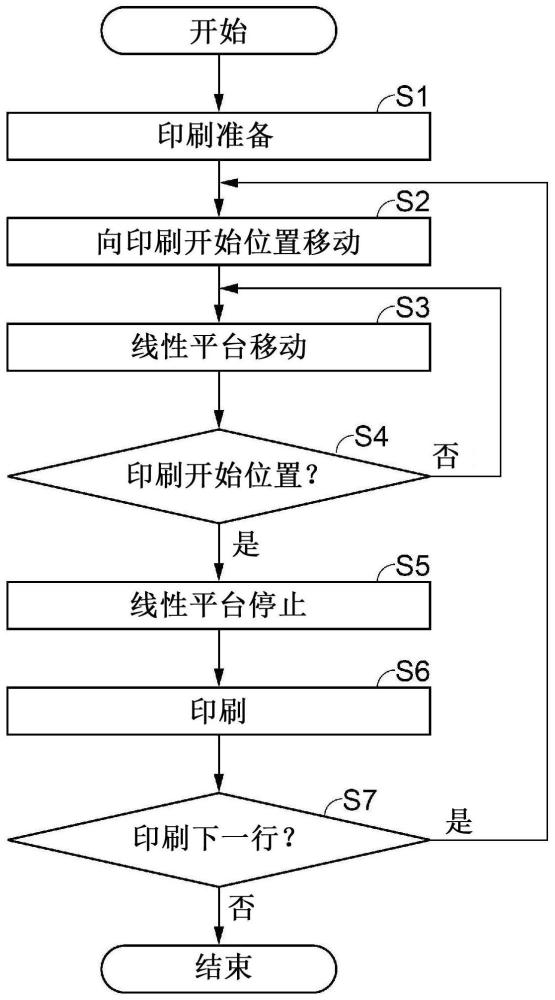
1、印刷方法其特征在于,使用经由压电驱动的线性平台而具备喷墨头的机械臂在对象物上进行印刷,在未从所述喷墨头喷出油墨时,所述线性平台相对于所述机械臂相对地移动,所述线性平台进行所述移动的方向与所述喷墨头边喷出所述油墨边进行移动的方向正交。
2、末端执行器具备:线性平台,与机械臂连接,进行压电驱动;以及喷墨头,在对象物上进行印刷,在未从所述喷墨头喷出油墨时,所述线性平台相对于所述机械臂相对地移动,所述线性平台进行所述移动的方向与所述喷墨头边喷出所述油墨边进行移动的方向正交。
3、机器人系统具备:机械臂;以及如上所述的末端执行器。
技术特征:
1.一种印刷方法,其特征在于,使用经由压电驱动的线性平台而具备喷墨头的机械臂在对象物上进行印刷,在所述印刷方法中,
2.根据权利要求1所述的印刷方法,其特征在于,
3.根据权利要求1所述的印刷方法,其特征在于,
4.根据权利要求1所述的印刷方法,其特征在于,
5.根据权利要求1所述的印刷方法,其特征在于,
6.一种末端执行器,其特征在于,具备:
7.一种机器人系统,其特征在于,具备:
技术总结
本发明提供印刷方法、末端执行器以及机器人系统,不易在线性平台的滚珠中产生微动磨损。印刷方法其特征在于,使用经由压电驱动的线性平台(11)而具备喷墨头(15)的机械臂(220)在对象物上进行印刷,在未从喷墨头(15)喷出油墨时,线性平台(11)相对于机械臂(220)相对地移动,线性平台(11)进行移动的方向与喷墨头(15)边喷出油墨边进行移动的方向正交。
技术研发人员:宫泽孝雄,岩崎友寿
受保护的技术使用者:精工爱普生株式会社
技术研发日:
技术公布日:2024/4/24
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1