用于L3实作培训及考试的轨道车真车模拟驾驶系统及方法与流程
用于l3实作培训及考试的轨道车真车模拟驾驶系统及方法
技术领域
1.本技术涉及列车驾驶培训技术领域,特别是涉及一种用于l3实作培训及考试的轨道车真车模拟驾驶系统及方法。
背景技术:
2.面对城市轨道的快速发展以及网络化运营的新局面,城市轨道交通运营企业将迎接更大的挑战,同时对轨道车司机人员提出了更高的要求。城市轨道交通实训平台由此应运而生,此平台面向全体轨道车司机,为其提供全方位的仿真模拟环境。
3.然而,传统的用于l3实作培训及考试的轨道车真车模拟驾驶系统只能针对单一的特定场景进行模拟,无法实现多方面的驾驶培训模拟。
技术实现要素:
4.基于此,有必要提供一种用于l3实作培训及考试的轨道车真车模拟驾驶系统及方法。
5.本技术提供一种用于l3实作培训及考试的轨道车真车模拟驾驶系统。所述用于l3实作培训及考试的轨道车真车模拟驾驶系统包括监控记录装置、虚拟机车终端、三通道投影装置以及数字信号采集控制装置。所述监控记录装置设置有正常监控控制模式、非正常行车控制模式、调车控制模式、目视行车控制模式以及区间作业控制模式。所述虚拟机车终端包括三维仿真单元。所述三维仿真单元用于建立轨道车运行环境的三维结构、模拟轨道车的运行原理、设备操作过程以及故障的诊断和排除过程。所述三通道投影装置用于提供线路模拟与显示。所述数字信号采集控制装置分别与所述监控记录装置、所述三维仿真单元以及所述三通道投影装置连接,用于实现与真实情景相同的内部逻辑、功能以及线路的控制。
6.在一个实施例中,所述三维仿真单元包括线路场景单元与三维机车模型。所述线路场景单元用于仿真实际线路。且所述线路场景单元与所述数字信号采集控制装置连接。所述三维机车模型用于以实际轨道车为原型进行全三维建模。所述三维机车模型与所述数字信号采集控制装置连接。
7.在一个实施例中,所述用于l3实作培训及考试的轨道车真车模拟驾驶系统还包括轨道车驾驶台。所述监控记录装置设置于所述轨道车驾驶台。
8.在一个实施例中,所述用于l3实作培训及考试的轨道车真车模拟驾驶系统还包括仿真舱体。所述仿真舱体包围形成一个容纳空间。所述监控记录装置、所述虚拟机车终端、所述三通道投影装置、所述数字信号采集控制装置以及所述轨道车驾驶台设置于所述容纳空间。
9.在一个实施例中,所述用于l3实作培训及考试的轨道车真车模拟驾驶系统还包括教员监控与管理系统控制台。所述教员监控与管理系统控制台用于运行多种不同功能的教员管理系统软件。
10.在一个实施例中,所述虚拟机车终端还包括机车逻辑仿真单元。所述机车逻辑仿真单元用于模拟轨道车在各种运行环境下的运行状况、操纵特性以及突发事件。
11.在一个实施例中,所述虚拟机车终端还包括机车牵引制动性能仿真单元。所述机车牵引制动性能仿真单元用于对轨道车的牵引、惰行以及制动状态进行实时仿真。
12.在一个实施例中,所述虚拟机车终端还包括轨道电路仿真单元。所述轨道电路仿真单元用于模拟实际的轨道电路。
13.在一个实施例中,所述虚拟机车终端还包括声音仿真单元。所述声音仿真单元用于模拟轨道车运行时的声音环境。
14.在一个实施例中,本技术提供一种轨道车司机驾驶培训模拟方法,采用上述实施例中任一项所述的用于l3实作培训及考试的轨道车真车模拟驾驶系统进行模拟。
15.上述用于l3实作培训及考试的轨道车真车模拟驾驶系统中,所述监控记录装置具有设备自检操作、参数设定操作等功能,可以设置5种控制模式。5种控制模式分别为正常监控模式、非正常行车模式、调车模式、目视行车模式和区间作业模式,可以设置补机状态,进行溜逸控制,具备警醒、道口提醒等功能。操作员可以进行运行操作、查询和转储等操作。当工作在区间作业模式下时,在区间正常运行时采用速度分级控制,根据轨道车信号信息,计算产生控制曲线,防止轨道车超速或越过关闭的信号机。当车速度达到控制模式曲线时,gyk监控记录装置对轨道车实施常用制动、熄火及紧急制动,防止轨道车“两冒一超”。在区间作业和限速区段采用速度连续控制,以计划停车地点或限速区段起点为目标点,计算产生连续的速度控制曲线,防止轨道车越过设定的停车点,防止超过限速区段的限制速度。
16.所述虚拟机车终端包括三维仿真单元。所述三维仿真单元利用虚拟现实的技术在计算机空间中建立轨道车运行环境的三维结构,模拟轨道车的运行原理、设备操作过程以及故障的诊断和排除过程,从而构造一个与实物轨道车相对应的软件系统,具有较好的逼真度与沉浸感。
17.所述三维仿真单元设置于所述虚拟机车终端上,能够进行无法在实物设备上进行的操作。通过所述三维仿真单元对轨道车实现三维数字化建模,可以实现学员在虚拟轨道车内的漫游、处理故障及非正常状况下行车等功能。通过鼠标和键盘进行处理,在全三维环境下,能够按照故障排查流程,逐步进行排查故障并进行处理,并可对标准化操作步骤逐步评判对错,并给出成绩。所述用于l3实作培训及考试的轨道车真车模拟驾驶系统采用硬件与软件相结合的方式进行故障的模拟,对相应设备进行故障处理操作,实现硬件上未涉及的机车部分,可模拟轨道车常见的各类故障现象,在故障排除后故障现象消失。
18.所述三通道投影装置能够提供原尺寸、无闪烁的线路模拟与显示,给受训学员带来身临其境的感觉。所述三通道投影装置采用计算机生成图像(cgi)的方式实现视景系统,采用图形工作站作为视景生成计算机。
19.所述监控记录装置、所述三维仿真单元以及所述三通道投影装置通过电气线路与所述数字信号采集控制装置连接。通过电气化设计,所述数字信号采集控制装置与所述三维仿真单元实现通讯,从而实现与真实一致的内部逻辑、功能及现象。
20.本技术提供的所述用于l3实作培训及考试的轨道车真车模拟驾驶系统,可以丰富学员培训的手段,使学员熟练掌握轨道车模拟驾驶技巧,更好地掌握操纵规范、了解操作流程、设备组成、工作原理,反复训练各种情况下的反应能力与应对方法,提高培训效率。本申
请提供的所述用于l3实作培训及考试的轨道车真车模拟驾驶系统采用虚拟软件与实物操作台相结合的方式,能够实现轨道车模拟驾驶演练、应急故障处理演练、非正常行车演练及考核等实训功能,并不局限于单一的特定场景培训。
附图说明
21.为了更清楚地说明本技术实施例或传统技术中的技术方案,下面将对实施例或传统技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
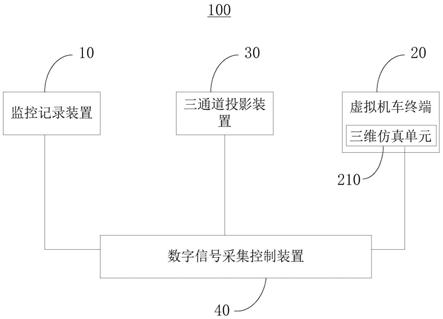
22.图1为本技术提供的一个实施例中用于l3实作培训及考试的轨道车真车模拟驾驶系统的原理结构示意图。
23.图2为本技术提供的一个实施例中三维仿真单元的原理结构示意图。
24.图3为本技术提供的一个实施例中虚拟机车终端的原理结构示意图。
25.图4为本技术提供的一个实施例中轨道车驾驶台与监控记录装置的设置结构示意图。
26.图5为本技术提供的一个实施例中仿真舱体分别与监控记录装置、虚拟机车终端、三通道投影装置、数字信号采集控制装置以及轨道车驾驶台的位置关系示意图。
27.图6为本技术提供的一个实施例中教员监控与管理系统控制台的原理结构示意图。
28.图7为本技术提供的一个实施例中非正常行车培训内容的表格示意图。
29.图8为本技术提供的一个实施例中故障处理培训内容的表格示意图。
30.图9为本技术提供的一个实施例中故障处理培训内容的表格示意图。
31.图10为本技术提供的一个实施例中故障处理培训内容的表格示意图。
32.图11为本技术提供的一个实施例中故障处理培训内容的表格示意图。
33.图12为本技术提供的一个实施例中故障处理培训内容的表格示意图。
34.图13为本技术提供的一个实施例中故障处理培训内容的表格示意图。
35.图14为本技术提供的一个实施例中故障处理培训内容的表格示意图。
36.附图标记说明:
37.用于l3实作培训及考试的轨道车真车模拟驾驶系统100、监控记录装置10、虚拟机车终端20、三维仿真单元210、线路场景单元211、三维机车模型212、机车逻辑仿真单元220、机车牵引制动性能仿真单元230、轨道电路仿真单元240、声音仿真单元250、三通道投影装置30、数字信号采集控制装置40、轨道车驾驶台50、仿真舱体60、容纳空间610、教员监控与管理系统控制台70、电源管理单元710、自动判分单元720、教员管理单元730、情景化专家引导单元80。
具体实施方式
38.为了便于理解本技术,下面将参照相关附图对本技术进行更全面的描述。附图中给出了本技术的实施例。但是,本技术可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使本技术的公开内容更加透彻全面。
39.除非另有定义,本文所使用的所有的技术和科学术语与属于本技术的技术领域的技术人员通常理解的含义相同。本文中在本技术的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本技术。
40.可以理解,本技术所使用的术语“第一”、“第二”等可在本文中用于描述各种元件,但这些元件不受这些术语限制。这些术语仅用于将第一个元件与另一个元件区分。举例来说,在不脱离本技术的范围的情况下,可以将第一电阻称为第二电阻,且类似地,可将第二电阻称为第一电阻。第一电阻和第二电阻两者都是电阻,但其不是同一电阻。
41.可以理解,以下实施例中的“连接”,如果被连接的电路、模块、单元等相互之间具有电信号或数据的传递,则应理解为“电连接”、“通信连接”等。
42.在此使用时,单数形式的“一”、“一个”和“所述/该”也可以包括复数形式,除非上下文清楚指出另外的方式。还应当理解的是,术语“包括/包含”或“具有”等指定所陈述的特征、整体、步骤、操作、组件、部分或它们的组合的存在,但是不排除存在或添加一个或更多个其他特征、整体、步骤、操作、组件、部分或它们的组合的可能性。同时,在本说明书中使用的术语“和/或”包括相关所列项目的任何及所有组合。
43.请参见图1,本技术提供一种用于l3实作培训及考试的轨道车真车模拟驾驶系统100。所述用于l3实作培训及考试的轨道车真车模拟驾驶系统100包括监控记录装置10、虚拟机车终端20、三通道投影装置30以及数字信号采集控制装置40。所述监控记录装置10设置有正常监控控制模式、非正常行车控制模式、调车控制模式、目视行车控制模式以及区间作业控制模式。所述虚拟机车终端20包括三维仿真单元210。所述三维仿真单元210用于建立轨道车运行环境的三维结构、模拟轨道车的运行原理、设备操作过程以及故障的诊断和排除过程。所述三通道投影装置30用于提供线路模拟与显示。所述数字信号采集控制装置40分别与所述监控记录装置10、所述三维仿真单元210以及所述三通道投影装置30连接,用于实现与真实情景相同的内部逻辑、功能以及线路的控制。
44.本实施例中,所述监控记录装置10具有设备自检操作、参数设定操作等功能,可以设置5种控制模式。5种控制模式分别为正常监控模式、非正常行车模式、调车模式、目视行车模式和区间作业模式,可以设置补机状态,进行溜逸控制,具备警醒、道口提醒等功能。操作员可以进行运行操作、查询和转储等操作。在一个实施例中,当工作在区间作业模式下时,在区间正常运行时采用速度分级控制,根据轨道车信号信息,计算产生控制曲线,防止轨道车超速或越过关闭的信号机。当车速度达到控制模式曲线时,gyk监控记录装置10对轨道车实施常用制动、熄火及紧急制动,防止轨道车“两冒一超”。在区间作业和限速区段采用速度连续控制,以计划停车地点或限速区段起点为目标点,计算产生连续的速度控制曲线,防止轨道车越过设定的停车点,防止超过限速区段的限制速度。
45.所述虚拟机车终端20包括三维仿真单元210。所述三维仿真单元210利用虚拟现实的技术在计算机空间中建立轨道车运行环境的三维结构,模拟轨道车的运行原理、设备操作过程以及故障的诊断和排除过程,从而构造一个与实物轨道车相对应的软件系统,具有较好的逼真度与沉浸感。
46.所述三维仿真单元210设置于所述虚拟机车终端20上,能够进行无法在实物设备上进行的操作。通过所述三维仿真单元210对轨道车实现三维数字化建模,可以实现学员在虚拟轨道车内的漫游、处理故障及非正常状况下行车等功能。通过鼠标和键盘进行处理,在
全三维环境下,能够按照故障排查流程,逐步进行排查故障并进行处理,并可对标准化操作步骤逐步评判对错,并给出成绩。所述用于l3实作培训及考试的轨道车真车模拟驾驶系统100采用硬件与软件相结合的方式进行故障的模拟,对相应设备进行故障处理操作,实现硬件上未涉及的机车部分,可模拟轨道车常见的各类故障现象,在故障排除后故障现象消失。
47.所述三通道投影装置30能够提供原尺寸、无闪烁的线路模拟与显示,给受训学员带来身临其境的感觉。所述三通道投影装置30采用计算机生成图像(cgi)的方式实现视景系统,采用图形工作站作为视景生成计算机。
48.所述监控记录装置10、所述三维仿真单元210以及所述三通道投影装置30通过电气线路与所述数字信号采集控制装置40连接。通过电气化设计,所述数字信号采集控制装置40与所述三维仿真单元210实现通讯,从而实现与真实一致的内部逻辑、功能及现象。
49.本技术提供的所述用于l3实作培训及考试的轨道车真车模拟驾驶系统100,可以丰富学员培训的手段,使学员熟练掌握轨道车模拟驾驶技巧,更好地掌握操纵规范、了解操作流程、设备组成、工作原理,反复训练各种情况下的反应能力与应对方法,提高培训效率。本技术提供的所述用于l3实作培训及考试的轨道车真车模拟驾驶系统100采用虚拟软件与实物操作台相结合的方式,能够实现轨道车模拟驾驶演练、应急故障处理演练、非正常行车演练及考核等实训功能,并不局限于单一的特定场景培训。
50.在一个实施例中,所述监控记录装置10包括主机、人机界面(dmi)、机车信号机、警惕按钮等设备。所述监控记录装置10的电源供电为dc24v,电源工作范围为18v至36v。
51.在一个实施例中,gyk监控记录装置10的可靠工作环境为大气压力74.8kpa至106kpa(海拔高度不超过2500m)。轨道车内部空气温度为
‑
25℃至+55℃,车外温度为
‑
40℃至+70℃。gyk监控记录装置10中的主机允许在
‑
40℃至+70℃的环境条件下存放。dmi允许在
‑
25℃至+70℃的环境条件下存放。最湿月平均最大相对湿度不大于90%(该月平均最低温度为25℃)。gyk监控记录装置10能承受使用时的振动和冲击而无损坏或故障。gyk监控记录装置10安装在能防止风、沙、雨、雪直接侵入的车体内。
52.在一个实施例中,gyk监控记录装置10的按键为带背光按键。在光线变暗时,按键上的字可自动透光。按键共24个,0
‑
9及小数点共11个键为复合键,复合键在参数修改状态作数字键用,在其他状态作功能键用,剩余按键为单功能键。
53.在一个实施例中,所述三通道投影装置30采用三通道投影的方式,水平视角不小于120度。当受训人员位于驾驶座椅的位置时,可通过投影系统得到良好的前向视景效果。所述三通道投影装置30具有边缘融合功能,具有重量轻、尺寸小、成像效果好的优点。所述三通道投影装置30的整个幕布采用矩形铝管构建弧形骨架,夹角不低于120
°
。弧形骨架各组成单元,并采用专用卡具定位焊接而成,误差范围
±
0.5mm。各单元均配定位块,使用内六角螺钉活连接,保证弧度公差。弧形幕布为硬屏,具有抗震性及超长的使用寿命。弧形幕骨架与密封舱体使用内六角螺钉活连接成一整体,保证系统的稳定性。
54.在一个实施例中,所述三通道投影装置30包括前向视景显示。前向视景显示的显示方式为投影仪加显示屏幕。前向视景显示的投影机类型为工程投影机。前向视景显示的物理分辨率为大于等于1024pixels
×
768pixels。前向视景显示的屏幕亮度为7000ansi lumens。前向视景显示的屏幕均匀度为95%。前向视景显示的屏幕水平视角为大于等于120度。前向视景显示的投影画面尺寸为40英寸至500英寸。前向视景显示的投影距离为1.02m
至12.7m。前向视景显示的有效扫描频段为水平15khz至100khz,垂直50hz至120hz。
55.在一个实施例中,所述三通道投影装置30包括视景计算机。所述三通道投影装置30的性能指标包括:cpu为intel酷睿i5
‑
3470;内存为4gb;硬盘为120g固态硬盘;graphic卡为gt740 ti 2gb gddr5;显存为1280*1024清晰度以上;通讯为tcp/ip 100baset。
56.在一个实施例中,所述三通道投影装置30的设备指标包括:渲染指标为支持4个纹理和灯光渲染引擎,支持alpha通道,可传递杰出性能,可达到400million pixels/sec,29.4million vec/sec,带纹理,灯光;纹理为支持真彩,所有面全纹理支持,以保证场景逼真性;三角形为30million tri/sec,带纹理和灯光;光源为支持环境漫射光、聚光、发射光模拟环境,最大可同时支持16个光源;色彩为支持24bit真彩显示;平滑度为纹理衔接无缝隙,抗锯齿,支持反走样,面过渡平滑度好;真实度为按真实比例模拟城轨列车驾驶的环境;场景范围为水平视场角为120度,垂直视场角30度,场景深度根据环境能见度可调;光源处理为环境光、漫射光、聚光、发射光进行正确处理;各种信号灯采用纹理和发射光相结合实现;车站日光灯较多采用纹理表示,通过环境光、漫射光达到较好的环境亮度。
57.请参见图2,在一个实施例中,所述三维仿真单元210包括线路场景单元211与三维机车模型212。所述线路场景单元211用于仿真实际线路。且所述线路场景单元211与所述数字信号采集控制装置40连接。所述三维机车模型212用于以实际轨道车为原型进行全三维建模。所述三维机车模型212与所述数字信号采集控制装置40连接。
58.本实施例中,所述三维仿真单元210包括线路场景单元211与三维机车模型212,使得用户可以在三维环境及三维仿真机车中进行向左向右移动、环顾四周、抬头低头等操作,同时也可以在机车内漫游、操作舱体内设备。所述线路场景单元211基于计算机成像(cgi)技术,以线路的工务、机务数据为基础全三维数字化建模,线路纵断面、曲线半径等线路参数与实际一致。例如,以阿图什市至疏勒县45km线路的工务、机务数据为基础全三维数字化建模,线路纵断面、曲线半径等线路参数与实际一致。所述线路场景单元211能够模拟轨道车到达区域内的相关场景,具体地包括轨道、架空线路、轨旁设备、沿线景物、标志性建筑等,能够从视觉、听觉、操纵真实感等方面逼真地再现轨道车在不同情况下的运行、作业环境。可根据客户需求,定制特定线路的三维场景。
59.所述三维机车模型212以轨道车为原型,按照1:1进行全三维建模。所述三维机车模型212包括车顶、车底、车体两侧、司机驾驶室等。在一个实施例中,所述三维机车模型212以gc
‑
220轨道车为原型,按照1:1进行全三维建模。
60.因此,所述三维仿真单元210能根据线路参数(曲线、坡道、黏着系数)、天气状况(大雾、大雪、大雨等)等数据,正确模拟轨道车的运行状况。
61.请参见图3,在一个实施例中,所述虚拟机车终端20还包括机车逻辑仿真单元220。所述机车逻辑仿真单元220用于模拟轨道车在各种运行环境下的运行状况、操纵特性以及突发事件。
62.本实施例中,所述机车逻辑仿真单元220的所有电路、机械、气动系统的逻辑关系与真实情况一致,能够全面、真实地模拟轨道车在各种运行环境下的运行状况、操纵特性、突发事件。在培训时,配备轨道车主要的电气原理图,学员根据原理图中开关断/合、线路得失电情况,了解并学习轨道车电气逻辑原理。电气原理图能够实时、动态并以矢量方式显示机车的主要电气原理图。在培训过程中,在电气原理图上,设置相应的操作按钮,用以对各
原理图的浏览与查看。所述机车逻辑仿真单元220采用智能、动态、矢量化显示技术,可对原理图画面进行任意的放大、缩小、平移操作,且不会出现画面失真。电气原理图可以实时、动态变化,以红色标示的方式在原理图画面上显示电路的得电情况、以白色标示显示电路的失电情况。
63.请参见图3,在一个实施例中,所述虚拟机车终端20还包括机车牵引制动性能仿真单元230。所述机车牵引制动性能仿真单元230用于对轨道车的牵引、惰行以及制动状态进行实时仿真。
64.本实施例中,所述机车牵引制动性能仿真单元230依据力学原理,能够基本准确的依据线路情况、轨道车自身状态等参数进行机车牵引力、机车阻力、制动力的计算,对轨道车的牵引、惰行、制动等状态进行实时仿真。同时,所述机车牵引制动性能仿真单元230还能够满足对制动机性能试验、工作原理等方面的学习、训练、考核等,例如jz
‑
7制动机。
65.请参见图3,在一个实施例中,所述虚拟机车终端20还包括轨道电路仿真单元240。所述轨道电路仿真单元240用于模拟实际的轨道电路。
66.本实施例中,所述轨道电路仿真单元240可以模拟出真实的轨道电路,实时检测区间占用情况,控制地面信号、转辙装置等设备状态的改变。所述轨道电路仿真单元240能够将相应轨道车信号反馈到运监设备上,学员依据信号灯变化、区间占用情况、道岔的变化等,控制轨道车运行。所述轨道电路仿真单元240通过设置地面信号非正常状态,训练学员非正常行车状态下的操作。
67.请参见图3,在一个实施例中,所述虚拟机车终端20还包括声音仿真单元250。所述声音仿真单元250用于模拟轨道车运行时的声音环境。
68.本实施例中,所述声音仿真单元250能够逼真地模拟列车运行时的声音环境,使用户能从既具有视觉又有听觉的环境中获得更多的信息,从而更增强了沉浸感和交互性。所述声音仿真单元250可以实现学员在操纵轨道车时听到的设备工作声、各种环境声音,例如轨道车在线路上运行的声音、轨道车惰行声音、轨道车发动机声音、下雨声音、蜂鸣器声音、鸣笛声音以及扳键开关声音。
69.请参见图4,在一个实施例中,所述用于l3实作培训及考试的轨道车真车模拟驾驶系统100还包括轨道车驾驶台50。所述监控记录装置10设置于所述轨道车驾驶台50。
70.本实施例中,所述轨道车驾驶台50设置有按钮、开关、指示灯、自动制动阀手柄、单独制动阀手柄、仪表、轨道车信号灯等与实际轨道车司机驾驶台设备的大小、外观、布局相一致,空气制动阀外观、功能与实际一致。所述轨道车驾驶台50设置有gyk监控记录装置10,可以配合所述轨道车驾驶台50上的设备进行应急故障处理。
71.在一个实施例中,所述轨道车驾驶台50采用焊接方式进行连接。所述轨道车驾驶台50的材料为钢或其它足够强度的轻质、难燃的材料。所述轨道车驾驶台50的表面光滑且无毛刺。所述轨道车驾驶台50中不同金属材料之间连接时,进行防腐处理。所述轨道车驾驶台50采用铆接件精确定位并对准,铆钉全部充满铆接孔。所述轨道车驾驶台50的设备结构及外观满足强度要求,可以确保在正常使用的情况下不会发生任何变形。
72.请参见图5,在一个实施例中,所述用于l3实作培训及考试的轨道车真车模拟驾驶系统100还包括仿真舱体60。所述仿真舱体60包围形成一个容纳空间610。所述监控记录装置10、所述虚拟机车终端20、所述三通道投影装置30、所述数字信号采集控制装置40以及所
述轨道车驾驶台50设置于所述容纳空间610。
73.本实施例中,所述仿真舱体60以真实轨道车为原型,按照1∶1比例建造,整体布局、尺寸、外观、内饰等效果与实际一致。真实轨道车可以为gc220型4轴轨道车,将电路制动系统真实还原,配合仿真系统实现模拟驾驶以及考试功能。所述仿真舱体60的车体结构主要包含舱体骨架、舱体表皮、内覆盖件、车窗玻璃、室内地面等。车体建造采用部件拼装组合形式。所述仿真舱体60的仿真车体外观高度逼真,外形表面光滑,无凹凸不平,整体效果与实际车体一致。所述仿真舱体60采用焊接方式进行连接。所述仿真舱体60的材料为钢或其它足够强度的轻质、难燃的材料。所述仿真舱体60的表面光滑且无毛刺。所述仿真舱体60中不同金属材料之间连接时,进行防腐处理。所述仿真舱体60采用铆接件精确定位并对准,铆钉全部充满铆接孔。
74.请参见图6,在一个实施例中,所述用于l3实作培训及考试的轨道车真车模拟驾驶系统100还包括教员监控与管理系统控制台70。所述教员监控与管理系统控制台70用于运行多种不同功能的教员管理系统软件。
75.本实施例中,所述教员监控与管理系统控制台70为一体式6屏显示控制台。所述教员监控与管理系统控制台70不仅可以显示教员监控管理系统界面,而且能够显示学员的三维作业情景、电气路状态、仪表状态等。所述用于l3实作培训及考试的轨道车真车模拟驾驶系统100还包括对讲设备。教员通过对讲设备可直接通话指导舱体内的学员作业,实现了教员对整个实训过程的全方位监控指导功能。
76.所述教员监控与管理系统控制台70设置有电源管理单元710。所述电源管理单元710能够实现对所有学员终端计算机的开关机统一控制。所述电源管理单元710可以通过一台主机控制其他多台计算机的开机、关机、重启操作,同时也可以对所述三通道投影装置30进行开关机操作,操作简便,省时快捷。
77.所述教员监控与管理系统控制台70设置有自动判分单元720与教员管理单元730。所述自动判分单元720用于模拟驾驶仿真演练、应急故障模拟处理演练、非正常情况下行车仿真演练的考核。所述自动判分单元720可以满足智能评分功能,能够实时监控、记录演练过程的每一步操作,并对比标准答案自动评定成绩。所述教员管理单元730用于辅助教员实现终端监控、终端管理、任务管理、试卷管理、成绩管理、试卷打印及退出功能。教师端正常启动后,教师可以通过所述教员管理单元730完成终端监控、终端管理、任务管理、试卷管理、成绩管理、试卷打印及退出等一系列功能。
78.所述教员监控与管理系统控制台70是整个所述用于l3实作培训及考试的轨道车真车模拟驾驶系统100的控制中心。在所述教员监控与管理系统控制台70上,可以运行系统管理、运行监控、教学与考核等多种教员管理系统软件。教员通过所述教员监控与管理系统控制台70上的软件能够实现模拟驾驶以及各种作业的日常维护与管理、训练及考核过程的管理与监控、操作评价及教学的辅导等功能。
79.请参见图6,在一个实施例中,所述用于l3实作培训及考试的轨道车真车模拟驾驶系统100还包括情景化专家引导单元80。所述情景化专家引导单元80用于指导学员进行模拟驾驶仿真演练、非正常行车演练和故障处理任务的虚拟仿真演练。所述情景化专家引导单元80采用情景化的实训方式,通过引导栏提示操作方法、设备位置、应产生的现象和结果等。所述情景化专家引导单元80可以指导学员进行模拟驾驶仿真演练、非正常行车演练和
故障处理等任务的虚拟仿真演练。
80.在一个实施例中,所述用于l3实作培训及考试的轨道车真车模拟驾驶系统100还包括服务单元。所述服务单元为整个所述用于l3实作培训及考试的轨道车真车模拟驾驶系统100的网络中心和数据中心。所述服务单元包括服务器设备及机柜,集成了服务软件系统。所述服务单元为用户提供任务请求、成绩上传、接受教师机控制等服务,保存用户的多种状态和训练及考试成绩数据。
81.在一个实施例中,所述用于l3实作培训及考试的轨道车真车模拟驾驶系统100还包括学员座椅。学员座椅的外形尺寸为590mm
×
580mm
×
1050mm(长
×
宽
×
高)。学员座椅的安装尺寸为学员座椅的靠背角度调节为80
°
至130
°
。学员座椅的升降调节幅度为110mm。学员座椅的座椅可前后移动范围≥175mm。学员座椅的坐垫高为580mm至690mm(65kg载荷)。学员座椅的坐垫深度可调,调节范围为75mm。学员座椅的座椅可定位
±
30
°
、
±
90
°
、
±
180
°
、
±
360
°
或可选自由旋转360
°
。
82.在一个实施例中,所述用于l3实作培训及考试的轨道车真车模拟驾驶系统100需要的场地尺寸可以根据实际尺寸进行设计布局。所述用于l3实作培训及考试的轨道车真车模拟驾驶系统100的场地电源要求为ac 220v/380v(
±
10%)50hz。所述用于l3实作培训及考试的轨道车真车模拟驾驶系统100的设备供电为三相五线制ac380v
±
10%50hz和单相ac220v
±
10%50hz。单套培训系统总配电箱设置于设备间内墙上,规格为三相五线制单套总功率为30kva。
83.在一个实施例中,所述用于l3实作培训及考试的轨道车真车模拟驾驶系统100的存放环境温度为
‑
20℃至55℃。所述用于l3实作培训及考试的轨道车真车模拟驾驶系统100的工作环境温度为
‑
10℃至45℃。所述用于l3实作培训及考试的轨道车真车模拟驾驶系统100的相对湿度为月平均不大于85%。所述用于l3实作培训及考试的轨道车真车模拟驾驶系统100的最高相对湿度不大于95%。所述用于l3实作培训及考试的轨道车真车模拟驾驶系统100的设备能够防虫害(尤其是啮齿类动物)、防霉、防灰尘和防火。
84.在一个实施例中,本技术提供一种轨道车司机驾驶培训模拟方法,采用上述实施例中任一项所述的用于l3实作培训及考试的轨道车真车模拟驾驶系统100进行模拟。在一个实施例中,所述用于l3实作培训及考试的轨道车真车模拟驾驶系统100可以应用于gc220型轨道作业车培训岗位和gc220型轨道作业车司机等培训岗位。
85.在一个实施例中,通过所述所述用于l3实作培训及考试的轨道车真车模拟驾驶系统100进行培训时,培训内容如下:
86.情景化的实训方式,通过所述情景化专家引导单元80的专家引导栏提示操作方法、设备位置、产生的现象和结果等,指导学员进行模拟驾驶、全面整备检查作业、制动机试验、应急故障处理、非正常情况下行车等实训任务的演练。
87.情景学习:在全三维的环境下,限定的时间内,通过所述情景化专家引导单元80的引导信息框,显示操作信息。学员根据显示操作信息,对所述用于l3实作培训及考试的轨道车真车模拟驾驶系统100中的设备进行操作,并可自动输出查看成绩。
88.情景考核:通过教员决定考核的内容、时间。在同样的环境下,限定的时间内,且在没有所述情景化专家引导单元80提示的情况下,完成考核。
89.在一个实施例中,通过所述所述用于l3实作培训及考试的轨道车真车模拟驾驶系
统100进行培训时,模拟驾驶培训内容包括库车西到库车站上行、库车站到库车西下行、库车西到库车站(侧出侧进)、库车西到库车站(侧出正进)、库车西到库车站(正出侧进)。
90.在一个实施例中,通过所述所述用于l3实作培训及考试的轨道车真车模拟驾驶系统100进行培训时,制动机试验培训内容包括jz7空气制动机试验。
91.在一个实施例中,通过所述所述用于l3实作培训及考试的轨道车真车模拟驾驶系统100进行培训时,全面整备检查作业培训内容包括前端检查与走行左侧检查。
92.请参见图7所示的表格,在一个实施例中,通过所述所述用于l3实作培训及考试的轨道车真车模拟驾驶系统100进行培训时,非正常行车培训内容包括图7所示的培训内容。
93.请参见图8至图14所示的表格,在一个实施例中,通过所述所述用于l3实作培训及考试的轨道车真车模拟驾驶系统100进行培训时,故障处理培训内容包括图8至图14所示的培训内容。
94.本技术提供的所述用于l3实作培训及考试的轨道车真车模拟驾驶系统100可以模拟地理环境、轨道车模型、天气状况、线路状况(包括站场、区间、信号机、道岔等),使学员有身临其境的视觉效果,并结合牵引计算、电路、气路数学模型,使学员可以通过实物硬件的操作,配合鼠标、键盘操纵轨道车操纵台上未涉及的硬件部分来实现模拟驾驶,培养学员的驾驶操纵能力。本技术提供的所述用于l3实作培训及考试的轨道车真车模拟驾驶系统100结合影像、图形图像、声音以及全三维数字化虚拟现实场景、配备实物司机操纵台,逼真地实现轨道车操纵界面、操作显示设备、控制逻辑以及线路场景。
95.在本说明书的描述中,参考术语“有些实施例”、“其他实施例”、“理想实施例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特征包含于本技术的至少一个实施例或示例中。在本说明书中,对上述术语的示意性描述不一定指的是相同的实施例或示例。
96.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
97.以上所述实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对申请专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1