一种机器人姿态定量直观演示仪
本发明涉及机器人仪器,尤其涉及一种机器人姿态定量直观演示仪。
背景技术:
1、机器人技术是目前热门研究技术之一,国内也有越来越多的学校申办了“机器人工程”专业。在机器人教学中,机器人运动学是重要的知识点,而机器人姿态的变换过程又是运动学中较为抽象、难理解的知识点之一。在实际教学中,通常仍然以理论讲述为主,适当配合计算机仿真补充相应的知识,学生学习理解起来困难。更重要的是,复杂抽象的数学计算很大程度上限制和打击了学生学习兴趣。因此,学生需要通过理论结合实践来更好地理解并掌握姿态变换的相关知识点。
2、目前用于教学的姿态演示方案主要有:三维动画仿真演示、激光跟踪仪测量演示以及利用串联机器人平台进行姿态演示。其中三维动画仿真演示的主要缺点是需要提前制作,演示内容无法根据课堂中的需要进行灵活调整,也无法让学生进行操作,学生参与感较低;激光跟踪仪采购成本较高,且属于精密仪器,对操作人员的操作水平要求较高,因此不太适合学生进行亲手操作;中国专利(cn 215814783 u)提出了一种基于串联机械臂的教学用具,该教学用具采用模块化设计,可实现自由组接,实现不同自由度的串联操作臂教学演示,但其制造成本高,机器人末端姿态变换演示不够直观,且机器人末端位姿易产生累积误差,导致演示位姿不够精确。
3、本发明提出的一种机器人姿态定量直观演示仪,其自由度为三转动自由度。本姿态定量直观演示仪区别于其他姿态教学用具的重要优点在于其结构简单紧凑、制造成本低,姿态变换演示效果直观、清晰,且学生容易上手操作,能够产生良好的教学效果。
技术实现思路
1、针对现有技术方案的不足,本发明的技术方案提供了一种机器人姿态定量直观演示仪。
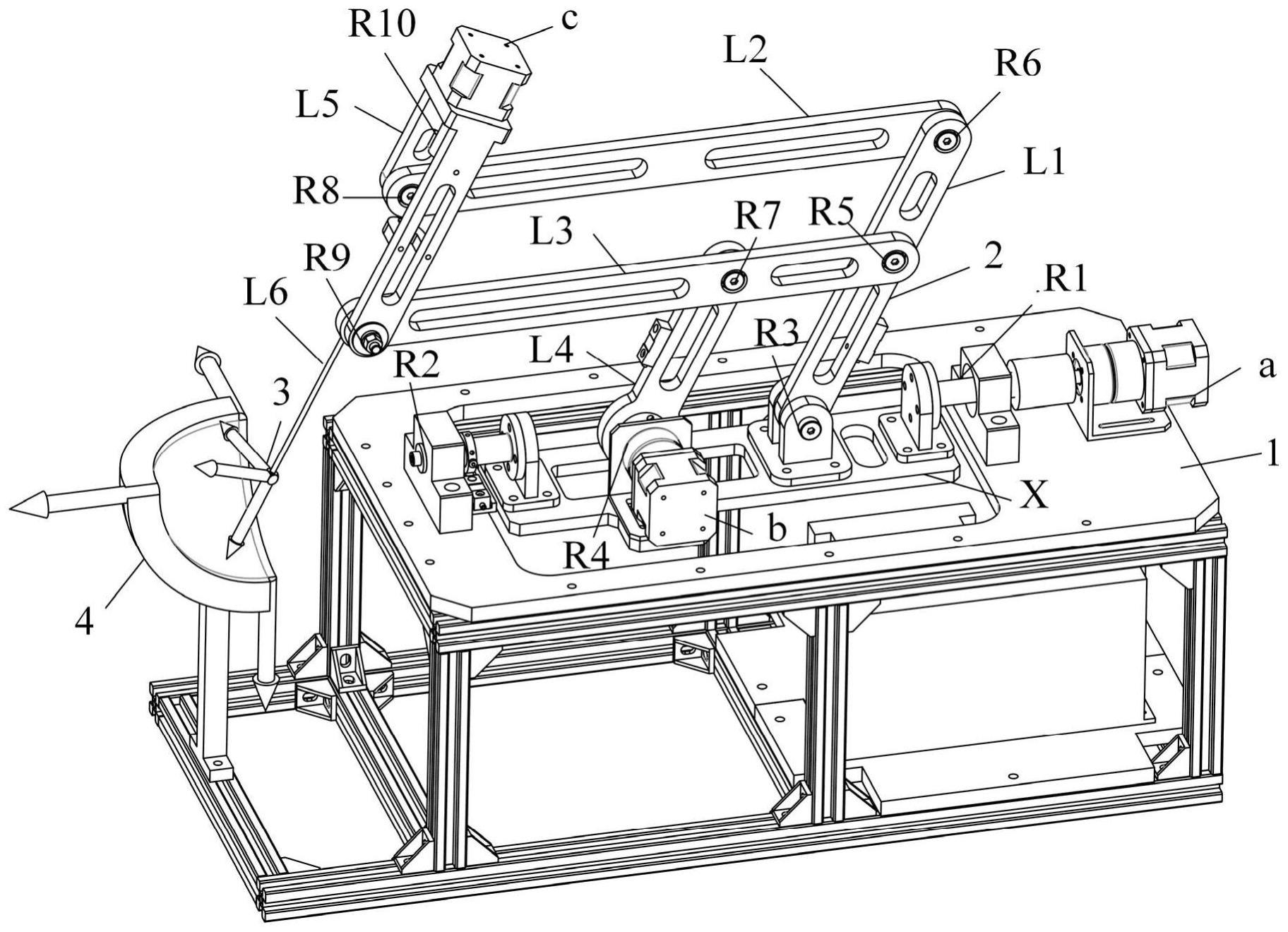
2、本发明的技术方案提供的一种机器人姿态定量直观演示仪,包括机架、双平行四边形机构、固定坐标系座、运动坐标系座、三个电机、控制系统;所述双平行四边形机构通过转动副一、转动副二与所述机架连接,所述运动坐标系座通过转动副十与所述双平行四边形机构连接,所述固定坐标系座与所述机架固连;所述转动副一、转动副二的轴线重合且均平行于所述机架平面,所述转动副十的轴线与所述转动副一的轴线相交于所述运动坐标系座原点,所述运动坐标系座原点与所述固定坐标系座原点重合;所述双平行四边形机构包括连杆一、连杆二、连杆三、连杆四、连杆五、旋转平台以及转动副三、转动副四、转动副五、转动副六、转动副七、转动副八、转动副九;所述连杆一通过所述转动副三与所述旋转平台连接,所述连杆四通过所述转动副四与所述旋转平台连接,所述连杆二通过所述转动副六与所述连杆一连接,所述连杆三通过所述转动副五与所述连杆一连接,所述连杆三通过所述转动副七与所述连杆四连接,所述连杆五分别通过所述转动副八、所述转动副九与所述连杆二、所述连杆三连接;所述连杆一、所述连杆四、所述连杆五相互平行,所述连杆二、所述连杆三、所述旋转平台相互平行,所述转动副三、所述转动副四、所述转动副五、所述转动副六、所述转动副七、所述转动副八、所述转动副九的轴线相互平行,所述转动副三、所述转动副四的轴线与所述转动副一的轴线垂直相交,所述转动副八、所述转动副九的轴线与所述转动副十的轴线垂直相交;电机一安装在所述机架上,电机二安装在所述旋转平台上,电机三安装在所述连杆五上,所述电机一通过所述转动副一驱动所述旋转平台的转动,所述电机二通过所述转动副四驱动所述连杆四的转动,所述电机三通过所述转动副十驱动所述连杆六的转动,所述连杆六与所述运动坐标系座固连。所述控制系统包括上位机、下位机、电源、三个电机驱动器。
3、本发明提供的技术方案带来的有益效果是:本发明提供了一种机器人姿态定量直观演示仪,其采用双平行四边形机构实现演示仪末端运动坐标系座绕固定坐标系座转动的三个自由度,由于运动坐标系座原点与固定坐标系座原点始终重合,因此能够直观演示两坐标系之间的姿态变换,其结构简单紧凑、制造成本低,姿态变换演示效果直观、清晰。
技术特征:
1.一种机器人姿态定量直观演示仪,其特征在于:
技术总结
本发明提供一种机器人姿态定量直观演示仪,属于机器人仪器领域;包括机架、双平行四边形机构、固定坐标系座、运动坐标系座、三个电机、控制系统。本发明采用双平行四边形机构实现演示仪末端运动坐标系座绕固定坐标系座转动的三个自由度,由于运动坐标系座原点与固定坐标系座原点始终重合,因此能够直观演示两坐标系之间的姿态变换,其结构简单紧凑、制造成本低,姿态变换演示效果直观展示欧拉角、RPY角等。
技术研发人员:曹文熬,陈建宇,袁明,闫樨霖,李世巍,陈国栋,汪天龙
受保护的技术使用者:中国地质大学(武汉)
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!