工业机器人智能装配编程示教平台
本发明属于实训教学平台,具体涉及一种工业机器人智能装配编程示教平台。
背景技术:
1、实训教学是指通过采用模拟实际工作中的案例环境,理论结合实践,使学生更好的参与学习,以提高学生的专业技能和实践经验。实训的最终目的是全面提高学生的职业素质,最终达到学生掌握足够的专业技能,以满足企业需求。校内的实训教学主要为虚拟实训和模拟实训两类;虚拟实训是指运用计算机网络,在虚拟环境模拟真实情况下遇到的各种工作任务;模拟实训是模拟建立小型的工作环境,在模拟的工作环境中完成具体的工作任务的过程。
2、目前校内的智能装配实训教学多采用虚拟实训的方式,以减少耗材或昂贵的训练器材需求,但虚拟实训方式是通过预编程来进行模拟教学的,无法完全模拟实际问题让学生动手解决,并且无法满足工业机器人的编程控制教学。
技术实现思路
1、本发明的目的在于提供一种工业机器人智能装配编程示教平台,以解决虚拟实训通过预编程来进行模拟教学,无法完全模拟实际问题,并且无法满足工业机器人的编程控制教学的技术问题。
2、为解决上述技术问题,本发明提供以下技术方案:
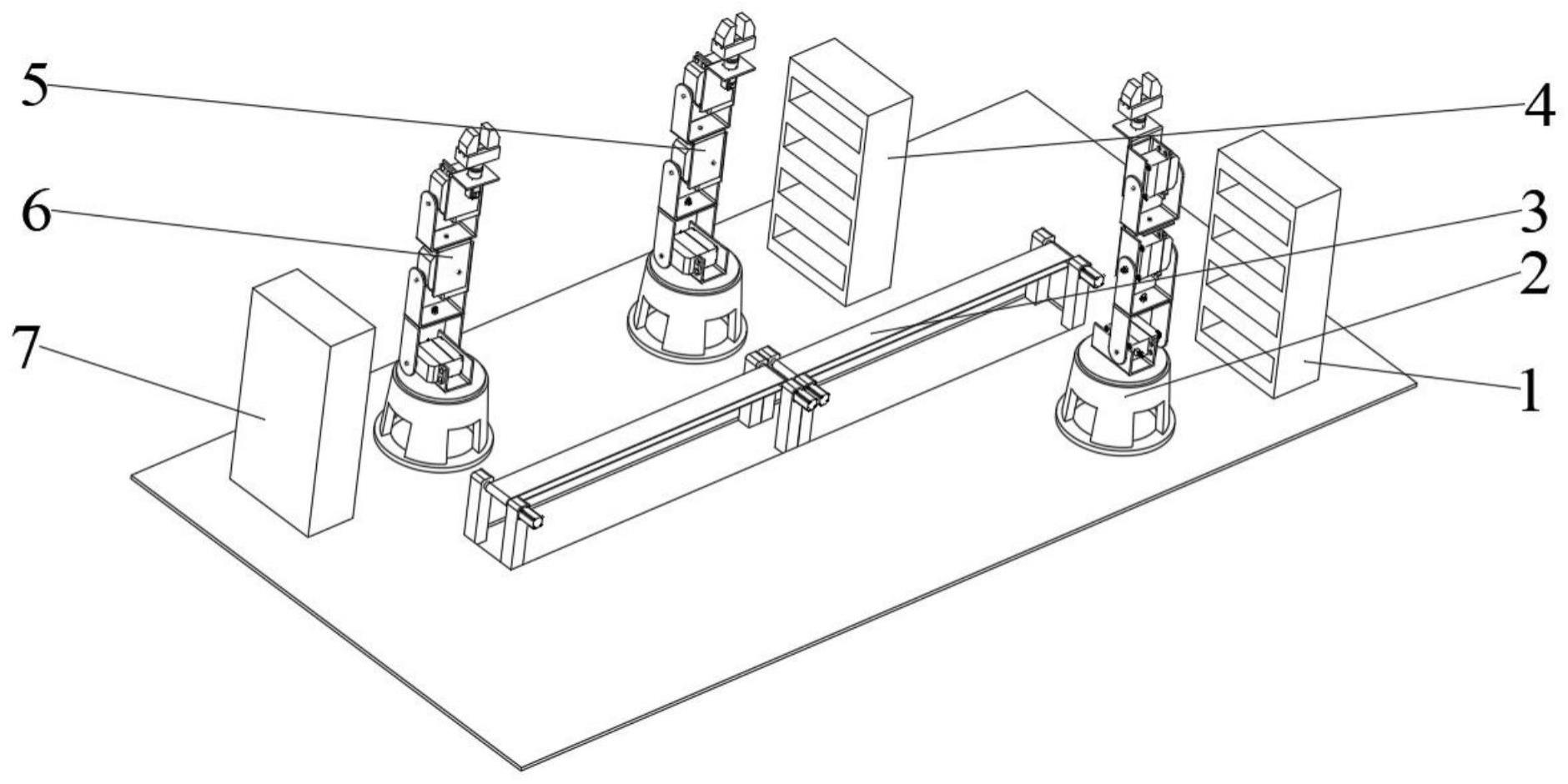
3、本发明工业机器人智能装配编程示教平台,包括多个工业机器人、多个零部件仓储区、成品库、智能装配流水线和平台;
4、所述平台固定在地面,所述的智能装配流水线在平台的中心位置,多个零部件仓储区分布在平台上,每个零部件仓储区对应设置一个工业机器人;成品库设置在平台上,成品库对应设置一个工业机器人;多个所述工业机器人结构完全相同。
5、优选的,所述成品库与多个所述零部件仓储区结构完全相同。
6、优选的,所述多个工业机器人的数量为3个,分别为工业机器人ⅰ、工业机器人ⅱ和工业机器人ⅲ;所述零部件仓储区为2个分别为零部件仓储区ⅰ和零部件仓储区ⅱ;
7、所述工业机器人ⅰ、工业机器人ⅱ和工业机器人ⅲ结构完全相同;所述的工业机器人ⅰ包括固定台、转动台、支撑架ⅰ、支撑架ⅱ、支撑架ⅲ、机器人抓手、电机支撑、舵机支撑ⅳ、舵机支撑ⅲ、舵机支撑ⅱ、舵机支撑ⅰ、单轴舵机ⅰ、单轴舵机ⅱ、单轴舵机ⅲ、单轴舵机ⅳ、联轴器、驱动电机和连接架;
8、所述固定台顶端过圆形轨道滑槽连接转动台,转动台下方安装舵机支撑ⅰ,单轴舵机ⅰ通过螺栓与舵机支撑ⅰ连接,转动台上方固定连接舵机支撑ⅱ,舵机支撑ⅱ通过螺栓与支撑架ⅰ连接,舵机支撑ⅱ通过螺栓与单轴舵机ⅱ连接,支撑架ⅰ与支撑架ⅱ固定连接,支撑架ⅱ内侧通过螺栓分别与舵机支撑ⅲ、单轴舵机ⅲ连接,同时舵机支撑ⅲ侧面固定安装连接架,连接架上方通过螺栓连接支撑架ⅲ,支撑架ⅲ内侧通过螺栓分别与舵机支撑ⅳ、单轴舵机ⅳ连接,舵机支撑ⅳ侧面固定安装电机支撑,电机支撑通过螺栓与驱动电机连接,驱动电机输出轴通过联轴器与机器人抓手连接。
9、优选的,所述智能装配流水线由两个传送装置组成,两个传送装置完全相同,两个传送装置在一条直线上,两个传送装置分别为零部件传送装置和成品传送装置,零部件传送装置用于装配零部件,成品传送装置用于传送装配完的成品;
10、所述传送装置包括机架ⅱ、传动滚筒ⅰ、机架ⅰ、机架ⅲ、传动滚筒ⅱ、机架ⅳ、传送带驱动电机ⅱ、环形传送带和传送带驱动电机ⅰ;
11、所述的机架ⅰ、机架ⅱ、机架ⅲ、机架ⅳ为传送装置的支撑,机架ⅰ和机架ⅱ间安装传动滚筒ⅰ,机架ⅰ外侧通过螺栓连接传送带驱动电机ⅰ,机架ⅲ和机架ⅳ间安装传动滚筒ⅱ,机架ⅲ外侧通过螺栓连接传送带驱动电机ⅱ,环形传送带安装在传动滚筒ⅰ和传动滚筒ⅱ上,传送带驱动电机ⅰ用于驱动传动滚筒ⅰ转动,传送带驱动电机ⅱ用于驱动传动滚筒ⅱ转动。
12、优选的,零部件仓储区ⅰ、零部件仓储区ⅱ与成品库结构完全相同;,成品库为四层开放式柜体,为钣金结构箱体,正面为敞开结构,方便工业机器人抓取零部件,后面封闭。
13、优选的,所述单轴舵机ⅰ、单轴舵机ⅱ、单轴舵机ⅲ、单轴舵机ⅳ、驱动电机、传送带驱动电机ⅰ、传送带驱动电机ⅱ分别与控制器连接,并通过自主编程分别写入单轴舵机ⅰ、单轴舵机ⅱ、单轴舵机ⅲ、单轴舵机ⅳ、驱动电机、传送带驱动电机ⅰ、传送带驱动电机ⅱ的控制程序来控制工业机器人运动轨迹和对零部件的装配过程。
14、优选的,所述零部件仓储区ⅰ所放置的零部件与零部件仓储区ⅱ所放置的零部件不相同。
15、本发明的有益技术效果:
16、本发明包括工业机器人、仓储区、成品区和智能装配流水线;本发明的工业机器人ⅰ将从零部件仓储区ⅰ中抓取出来的零部件ⅰ和工业机器人ⅱ将从零部件仓储区ⅱ抓取出来的零部件ⅱ在预设的位置上完成装配过程,通过对智能装配流水线和工业机器人的设置来模拟装配中的实际问题,实现了模拟装配的过程,能够让学生深入了解可能出现问题的产生原因,并亲自动手解决问题,提高学生的动手实践能力;通过自主编程控制机器人的运动轨迹,实现对受训学生的工业机器人的编程控制教学。
技术特征:
1.工业机器人智能装配编程示教平台,其特征在于,包括多个工业机器人、多个零部件仓储区、成品库、智能装配流水线(3)和平台;
2.根据权利要求1所述的工业机器人智能装配编程示教平台,其特征在于,所述成品库与多个所述零部件仓储区结构完全相同。
3.根据权利要求1所述的工业机器人智能装配编程示教平台,其特征在于,多个工业机器人的数量为3个,分别为工业机器人ⅰ、工业机器人ⅱ和工业机器人ⅲ;多个零部件仓储区的数量为2个分别为零部件仓储区ⅰ和零部件仓储区ⅱ;
4.根据权利要求3所述的工业机器人智能装配编程示教平台,其特征在于,所述工业机器人ⅰ(2)、工业机器人ⅱ(5)和工业机器人ⅲ(6)结构完全相同;
5.根据权利1或权利要求3所述的工业机器人智能装配编程示教平台,其特征在于,智能装配流水线(300)由两个传送装置组成,两个传送装置完全相同,两个传送装置在一条直线上;
6.根据权利要求3所述的工业机器人智能装配编程示教平台,其特征在于,零部件仓储区ⅰ(1)、零部件仓储区ⅱ(4)与成品库(7)结构完全相同;成品库(7)为四层开放式柜体,为钣金结构箱体,正面为敞开式结构、后面为封闭式的,方便工业机器人抓取零部件。
7.根据权利4或权利要求5所述的工业机器人智能装配编程示教平台,其特征在于,单轴舵机ⅰ(212)、单轴舵机ⅱ(213)、单轴舵机ⅲ(214)、单轴舵机ⅳ(215)、驱动电机(217)、传送带驱动电机ⅱ(307)、传送带驱动电机ⅰ(309)分别与控制器连接,并通过自主编程分别写入单轴舵机ⅰ(212)、单轴舵机ⅱ(213)、单轴舵机ⅲ(214)、单轴舵机ⅳ(215)、驱动电机(217)、传送带驱动电机ⅱ(307)、传送带驱动电机ⅰ(309)的控制程序来控制工业机器人的运动轨迹。
技术总结
本发明一种工业机器人智能装配编程示教平台,解决了现有技术中存在的虚拟实训通过预编程来进行模拟教学,无法完全模拟实际问题,并且无法满足工业机器人的编程控制教学的技术问题;本发明包括工业机器人Ⅰ、工业机器人Ⅱ和工业机器人Ⅲ、零部件仓储区Ⅰ、零部件仓储区Ⅱ、成品库和智能装配流水线;本发明能够通过工业机器人抓取不同形状的零部件到预设的位置上实现装配过程,还可以自主编程控制机器人的运动轨迹,实现了装配的柔性生产及机器人的智能化。
技术研发人员:史尧臣,李庆华,张世宏,于雪莲,徐田恬,李晓旭,马晓璐,杨凤双,张晋华,李泽启,赵天祥
受保护的技术使用者:长春大学
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!