一种基于VR技术的压雪机运动仿真系统及方法
本发明属于虚拟现实,更具体的,涉及一种基于vr技术的压雪机运动仿真系统及方法。
背景技术:
1、随着冰雪运动在我国的逐渐兴起,越来越多的人和企业投入到冰雪运动相关行业当中。随着雪场的逐渐增多,压雪机作为雪场雪道建设与维护必备的大型装备,其需求也随之上升,与此同时压雪机操作人员也陷入紧缺的状态。压雪机操作训练一般采用样机或者实机操作结合理论学习进行,传统的压雪机操作培训方法不仅仅受到时间、场地设备的限制还容易出现由于操作不当造成的设备损坏和人员受伤,效率低的同时效果也不尽人意。随着虚拟现实技术的不断进步和发展,虚拟现实技术在工程机械等领域的应用越来越广泛。
2、为了解决压雪机操作人员培训受限、培训效果差等问题,本发明提供一种基于vr技术的压雪机运动仿真系统及方法,帮助使用者更深入了解压雪机不同工况下工作原理和运动操作方法,获得沉浸式的体验,解决了压雪机操作人员培训困难问题,提高压雪机操作人员的培训效率。
技术实现思路
1、本发明采用以下技术方案予以实现:
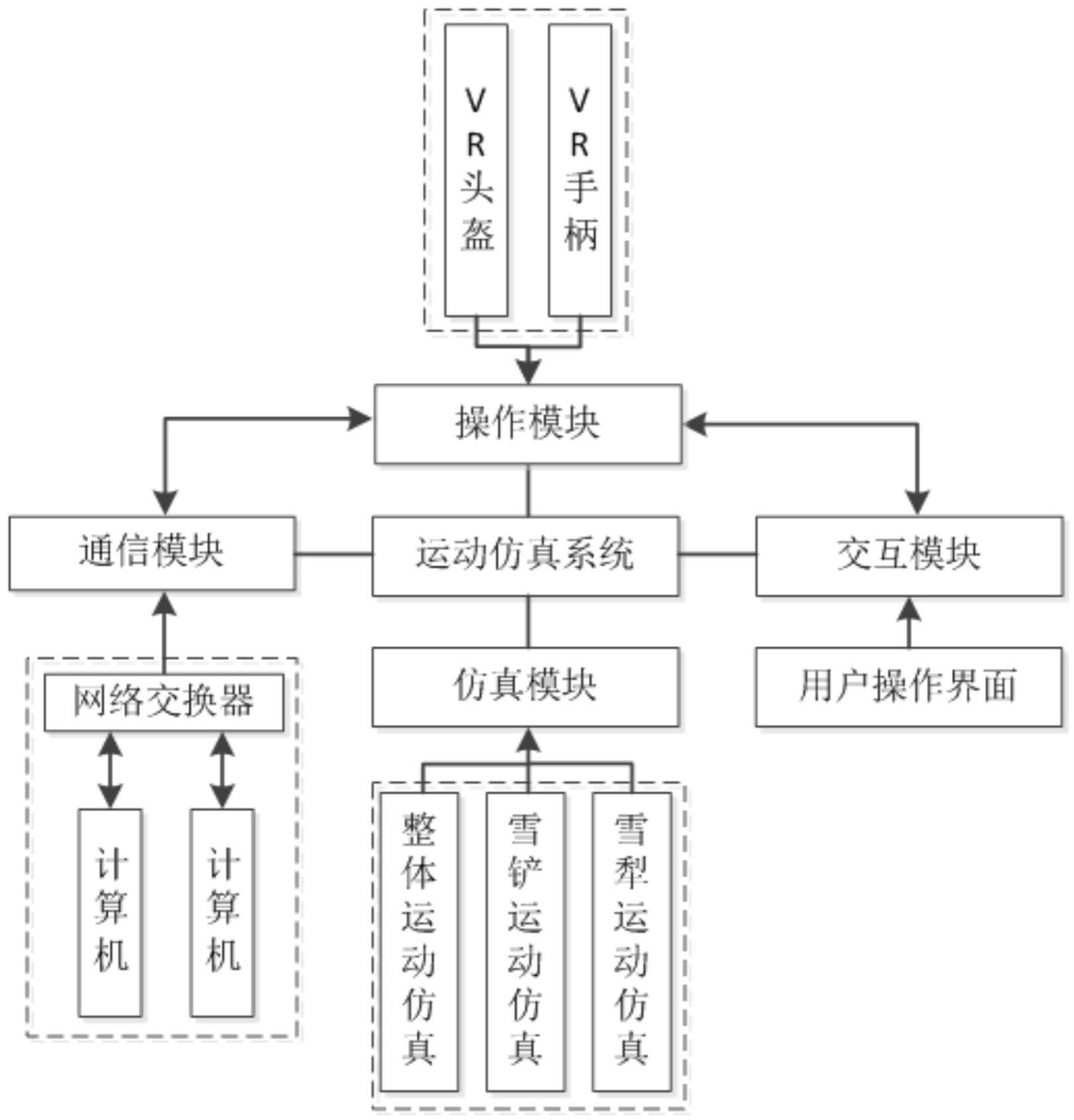
2、基于vr技术的压雪机运动仿真系统及方法主要由操作模块、交互模块、通信模块和仿真模块组成。
3、所述操作模块主要有vr手柄和vr头盔组成,vr手柄和vr头盔通过通信模块与系统建立联系,vr手柄实现与系统的交互,vr头盔负责接收音、视频信息并将信息反馈给使用者。vr头盔通过usb接口和dp接口与计算机连接,vr手柄通过蓝牙模块与计算机连接,vr手柄及vr头盔上有定位装置,通过光学定位系统可以实时识别真实环境中手柄和头盔的空间坐标,并且在虚拟的环境下能够实时的反馈,实现在虚拟环境下的沉浸式体验。
4、所述交互模块包括用户操作界面,用户操作界面中包括场景漫游、运动仿真、部件介绍等,使用者通过手柄在虚拟环境下与操作界面交互完成不同的操作,通过菜单选择,完成运动仿真动作,场景视角切换等。
5、所述通信模块主要由网络交换器、计算机和服务器组成,主要负责实现各模块之间的通信。计算机通过网络交换机实现与服务器之间的信息交换,实现在服务器中提取后台数据以及用户信息。
6、所述仿真模块主要有整机运动仿真、雪铲运动仿真和雪犁运动仿真组成。压雪机整机运动仿真实现压雪机的行进、转向、上下坡以及压雪碎雪等动作。雪铲运动仿真实现雪铲倾斜、升降、回转及雪铲左右翼等运动。雪犁运动仿真实现雪犁的倾斜、升降、回转及雪犁辊等运动。
7、运动仿真模块主要通过三维模型建立、三维模型导入、虚拟场景搭建、关键部件选取、运动参数设定、运动位姿判断等步骤实现运动仿真。其主要步骤如下:
8、1)搭建压雪机三维模型,包括运动部件、连接部件、框架,保证各部件之间的装配关系。
9、2)对模型进行轻量化处理,去除冗余部分,并赋予材质参数,随后导入unity3d虚拟环境中。
10、3)在unity3d下搭建虚拟场景,包括坡度起伏的雪地地形形貌、树木房屋等周边景物,以及白天、黑夜不同工况。
11、4)通过动作发生过程分析确定零件之间的运动传递关系,选取产生运动动作的关键部件。
12、5)设置关键部件的运动参数,包括驱动件的方向、速度以及运动部件的摩擦阻力。
13、6)根据运动部件初始和终了的空间坐标位置,通过运动参数计算每个时刻的位姿信息。
14、7)获取当前时刻的位姿信息,实时判断是否达到指定位置,如果达到位置则停止运动,如果没有达到位置,则重复步骤6-7。
15、其中,运动仿真模块中的压雪机整机运动仿真实现方法为:
16、添加旋转力和摩擦力到压雪机履带上的每个轮子上;摩擦力设置为零,添加控制两侧履带中的轮子逆时针/顺时针同速转动,实现前进/后退运动;适当调节增加左边或者右边轮子摩擦力,实现两侧轮子差速旋转,实现转向运动。上下坡运动时,除了履带轮子添加的参数之外,还需要添加雪铲和雪犁的运动参数和力实现需要的相应运动,保证适应雪道。
17、压雪机雪铲运动仿真实现方法为:控制雪铲连接处的左右两侧液压缸进行伸/缩运动,同时通过transform.rotate(y)程序控制车架处旋转轴的顺/逆时针转动,并控制活塞杆与雪铲连接轴同步转动完成雪铲的升/降运动。控制雪铲连接处顶部液压缸进行伸/缩运动,同时通过transform.rotate(y)程序控制车架处旋转轴的逆/顺时针转动,并控制活塞杆与雪铲连接轴同步转动完成雪铲的前/后倾斜运动。控制雪铲两翼与主雪铲连接处液压缸进行伸/缩运动,同时通过transform.rotate(y)程序控制主雪铲液压缸旋转轴的逆/顺时针转动,对雪铲两翼与主铲的连接轴进行旋转约束,并控制活塞杆与雪铲两翼连接轴同步转动完成雪铲两翼的开/合倾斜运动。
18、压雪机雪犁运动仿真实现方法为:控制雪犁连接处底侧液压缸进行伸/缩运动,同时通过transform.rotate(x)程序控制雪犁连接处底部液压缸与车架连接的旋转轴的顺/逆时针转动,并控制活塞杆与雪犁连接轴同步反向转动完成雪犁的升/降运动。控制雪犁连接处中部的液压缸进行伸/缩运动,同时通过transform.rotate(x)程序控制雪犁连接处中部液压缸与车架连接的旋转轴的逆/顺时针转动,并控制活塞杆与雪犁连接轴同步反向转动完成雪铲的左/右摆动运动;控制雪犁仓中的雪犁辊的旋转轴的顺/逆时针转动,实现雪犁辊的旋转运动工作状态。
19、雪铲和雪犁运动仿真步骤中液压缸的伸/缩运动仿真实现方法为:利用同轴约束装配,约束液压缸的活塞杆和缸体,设置两个标记点,一个位于液压缸体,一个位于活塞杆上,利用vector3.distance和float anglex构造函数计算出两个标记点之间的欧拉角和位置向量,再利用算出的欧拉角和位置向量来修正两个物体之间的位置和旋转角,通过移动活塞杆标记点实现液压缸活塞杆的伸缩运动。
技术特征:
1.一种基于vr技术的压雪机运动仿真系统及方法,其特征在于,所述基于vr技术的压雪机运动仿真系统及方法主要由操作模块、交互模块、通信模块和仿真模块组成。
2.如权利要求1所述的运动仿真模块中的压雪机整机运动仿真实现方法为:
3.如权利要求1所述的运动仿真模块中的压雪机雪铲运动仿真实现方法为:
4.如权利要求1所述运动仿真模块中的压雪机雪犁运动仿真实现方法为:
5.如权利要求3和4所述的液压缸的伸/缩运动仿真实现方法为:
技术总结
本发明提供了一种基于VR技术的压雪机运动仿真系统及方法,包括操作模块、交互模块、通信模块和仿真模块。操作模块通过VR手柄感知触觉信息,通过VR头盔接收音视频信息,实现虚拟环境下动作操作。交互模块通过VR手柄在虚拟环境下与操作界面交互。通信模块通过网络交换机实现与服务器之间的信息交换。仿真模块包括压雪机整体运动仿真、雪铲俯仰开合运动仿真、雪犁摆动旋转运动仿真,通过三维模型建立、三维模型导入、虚拟场景搭建、关键部件选取、运动参数设置、运动位姿判断实现。本发明仿真压雪机不同工况下的运动过程,使用者深入了解压雪机工作原理和运动操作方法,获得沉浸式的体验,提高压雪机操作人员的培训效率。
技术研发人员:赵月静,董建国,秦志英,满晓飞,刘珺旸
受保护的技术使用者:河北科技大学
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!