基于毫米波雷达的阿克曼机器人
1.本实用新型涉及智能驾驶技术领域,尤其涉及基于毫米波雷达的阿克曼机器人。
背景技术:
2.近年来,智能驾驶技术成为了汽车领域的主要研究热点之一。然而智能驾驶车辆在真实路面进行测试时,驾驶系统可能由于路面状况的不确定性会存在一定的安全隐患,从而导致交通事故的发生。
3.为了解决该问题,我们提出并设计了一套基于毫米波雷达的智能驾驶模拟系统。该模拟系统主要是在实验室搭建的模拟场景下进行测试,从而避免了路面测试意外的发生。根据驾驶模拟系统测试分析结果实现对整个系统的有效性和可靠性进行评估,进而为真实路面测试奠定了一定的基础。
技术实现要素:
4.本实用新型的目的是为了解决智能驾驶技术成为了汽车领域的主要研究热点之一。然而智能驾驶车辆在真实路面进行测试时,驾驶系统可能由于路面状况的不确定性会存在一定的安全隐患,从而导致交通事故的发生的问题,而提出的基于毫米波雷达的阿克曼机器人。
5.为了实现上述目的,本实用新型采用了如下技术方案:基于毫米波雷达的阿克曼机器人,包括小车本体,所述小车本体外表面设置有四个驱动模块,四个所述驱动模块位于小车本体内表面分别配套设置有电机与舵机执行器,所述小车本体上表面靠近左侧位置固定连接有电源供电模块,所述小车本体上表面固定连接有小车主控,所述小车主控上表面固定连接有支撑杆,所述支撑杆上表面固定连接有监测组件,所述支撑杆后表面固定连接有环境监测主控。
6.优选的,所述监测组件包括图像采集和处理组件、空气质量监测和雷达障碍检测,所述空气质量监测、雷达障碍检测与环境监测主控电性连接。
7.优选的,所述小车主控与环境监测主控、图像采集和处理组件、电源供电模块和驱动模块电性连接。
8.优选的,所述电源供电模块配套设置有稳压模块,所述稳压模块与小车主控和雷达障碍检测电性连接,所述电源供电模块与电机与舵机执行器电性连接。
9.优选的,所述小车主控包括控制显示台主控、无限通信模块和速度方向控制器,且无限通信模块和速度方向控制器均与控制显示台主控电性连接。
10.与现有技术相比,本实用新型的优点和积极效果在于,
11.1、本实用新型提出基于毫米波雷达的阿克曼机器人,其模拟仿真车主要包含环境监测部分和主控两大部分。在模拟驾驶模式下,仿真车的状态主要由控制显示台发送的控制信息决定,用于模拟基本的驾驶操作。当仿真车切换到自动驾驶模式时,该系统则通过awr1843毫米波雷达对路面的障碍信息进行检测,并采用openmv4视觉处理器实时监测预期
路线的偏移角度和曲率信息,主控部分则将这些数据信息通过算法处理转化为仿真车的后轮的转速与前轮的转向角,从而根据路面状况实时改变仿真车的运动状态。
12.2、本实用新型提出基于毫米波雷达的阿克曼机器人,其控制显示平台一方面用于模拟驾驶模式下控制信息的发送,另一方面则是用来将路面信息在可视化界面中进行显示,主要包含仿真车状态信息仪表图、空气质量信息波形图、雷达障碍信息点云图等ui界面。此外,该平台还可以实时显示当前网络时间和播放内部多媒体音乐等多种辅助功能,提高了用户的使用体验。
附图说明
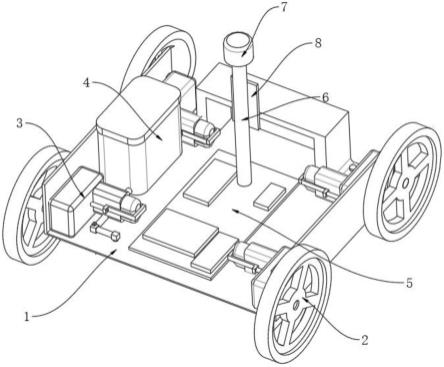
13.图1为本实用新型提出基于毫米波雷达的阿克曼机器人的结构示意图;
14.图2为本实用新型提出基于毫米波雷达的阿克曼机器人的框架结构示意图;
15.图3为本实用新型提出基于毫米波雷达的阿克曼机器人小车主控的框架结构示意图。
16.图例说明:1、小车本体;2、驱动模块;3、电机与舵机执行器;4、电源供电模块;5、小车主控;6、支撑杆;7、监测组件;8、环境监测主控。
具体实施方式
17.为了能够更清楚地理解本实用新型的上述目的、特征和优点,下面结合附图和实施例对本实用新型做进一步说明。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
18.在下面的描述中阐述了很多具体细节以便于充分理解本实用新型,但是,本实用新型还可以采用不同于在此描述的其他方式来实施,因此,本实用新型并不限于下面公开说明书的具体实施例的限制。
19.实施例1,如图1-3所示,基于毫米波雷达的阿克曼机器人,包括小车本体1,小车本体1外表面设置有四个驱动模块2,四个驱动模块2位于小车本体1内表面分别配套设置有电机与舵机执行器3,小车本体1上表面靠近左侧位置固定连接有电源供电模块4,小车本体1上表面固定连接有小车主控5,小车主控5上表面固定连接有支撑杆6,支撑杆6上表面固定连接有监测组件7,支撑杆6后表面固定连接有环境监测主控8。监测组件7包括图像采集和处理组件、空气质量监测和雷达障碍检测,空气质量监测、雷达障碍检测与环境监测主控8电性连接。小车主控5与环境监测主控8、图像采集和处理组件、电源供电模块4和驱动模块2电性连接。电源供电模块4配套设置有稳压模块,稳压模块与小车主控5和雷达障碍检测电性连接,电源供电模块4与电机与舵机执行器3电性连接。
20.针对模拟驾驶的应用场景,我们不难发现,智能驾驶驾驶技术一方面依赖于高精度的雷达与图像采集系统,而另一方面则是依赖于算力更强的处理器。这也是现在自动驾驶研究的一个重要分支。因此采用stm32f407vet6微处理器作为小车主体的控制器,环境监测部分则是采用性能稍弱的stm32f103c8t6微处理器。这两部分则是通过有线高速串口进行数据传输,驾驶系统小车的总体架构如图2所示,该小车主体通过15v直流电源供电,电源通过降压模块降为5v为主控制器和毫米波雷达进行供电,其余传感器则是由控制器上的3.3v供电。其中障碍检测与图像处理分别采用awr1843毫米波雷达与openmv4传感器进行外
围环境的障碍信息与图像信息的监测。由于障碍监测的数据量太大,所以障碍检测的数据信息首先经过环境监测主控的预处理,然后再由串口通信将数据信息传输至小车主控,小车主控将对预处理后的信息进行二次处理,最终去控制执行器完成模拟驾驶操作。由于图像采集模块里面内置图像处理系统,所以可以直接将图像处理的信息传输给小车主控制器。空气质量监测主要包含对温度,湿度,光照强度,烟雾浓度四部分环境信息的检测,监测后的数据通过无线串口通信的方式传输至控制显示平台
21.如图3所示,小车主控5包括控制显示台主控、无限通信模块和速度方向控制器,且无限通信模块和速度方向控制器均与控制显示台主控电性连接。
22.为了使周围环境信息和小车的状态信息直观的反映出来,本设计采用10.1寸串口屏幕进行ui界面的绘制与显示。该控制显示平台基本架构如图3所示,控制显示台主要由小车速度方向控制器和串口屏幕显示两部分组成,现将这两部分的主要功能介绍如下:
23.(1)小车速度方向控制器主要在在人为遥控驾驶时使用,该控制器主要由两个电位器摇杆组成。人为的改变摇杆幅度就可以控制电位器的输出电压,主控制器通过adc电压采集将模拟量转化成单片机能够直接处理的数字量,再将采集电压通过无线传输给驾驶系统的主控,最后就可以通过操作驾驶系统的主控制器就实现对小车的实时速度与方向的控制,进而模拟驾驶人员的驾驶操作。
24.(2)串口显示屏幕部分则是将驾驶系统监测到的环境信息通过无线传输的通信方式传输到显示台,将环境信息以图形化界面的形式展现出来,屏幕主要的ui界面包含环境监测,雷达点云,图像显示,模拟驾驶等主要功能模块。液晶屏幕与主控制台之间采用串口通信的方式进行数据交互,控制台通过串口向液晶屏幕发送相关指令就可以实现对相关信息的显示。
25.在国外智能汽车研究领域,非汽车企业比汽车企业表现得更加抢眼。在2012年,谷歌研发的自动驾驶汽车获得了拍照并成功上路,并且在自动驾驶过程中,实现了零故障率,驾驶里程超过48万公里,该驾驶系统主要利用大量激光测距仪对路面进行扫描,从而建立3d路面数据,并通过汽车上装载的摄像头完成对红绿灯以及交通标识的识别,保证了驾驶系统的真正行驶路线与规划路线的一致性。截至2016年底,美国政府颁布的相关法律已经能够允许企业所生产的自动驾驶汽车可以在美国的16个州里进行道路上行驶并进行相关测试。在自动驾驶芯片方面,在2022年初,英伟达公司发布了hyperion 8计算平台,其具备强大的数据处理能力,可同时处理12颗摄像头捕捉到的图像信息,并可以同时处理分析9个毫米波雷达、12个超声波雷达和1颗激光雷达等雷达信息,该自动驾驶处理器预计会在2023年投入使用。
26.相比与国外,我国对该领域的研究主要有百度,腾讯,阿里,华为等众多公司,其中早在2013年,百度就开始无人驾驶项目的制定与研发。在2017年,百度针对无人驾驶的研发制定出了apollo(阿波罗)计划,该计划制造出的自动驾驶系统主要涵盖四大板块,分别是车辆平台,硬件平台,软件算法平台以及云端数据存储平台。此外,阿里巴巴也在2016年设立“互联网汽车基金”。经过长达一年的开发与研究,阿里在来年推出了与上海汽车集团合作研发的首款互联网驾驶汽车。虽然我国在在领域研究与国外还存在一定的差距,但是目前来说,我国也取得了阶段性的成果,例如国防科技大学与红旗联合研发的红旗无人试验车在我国自动驾驶领域获得巨大成果,该车在真实路面环境下实现自主超车67次,并且人
为操作的里程数不到该次实验总理程的百分之一。这次实验测试距离远远超过往常的测试里程,达到了286公里。总的来说,在未来该领域的研究中,更加精确的传感器、计算能力更强的芯片和更为成熟的决策系统将是未来智能驾驶研究的重要核心。
27.对于自动驾驶的等级评定,在其相关领域存在着两套标准,其中一套是由nhstab(美国高速公路安全管理局)颁布的,另外一套是由sae international(国际汽车工程师协会)制定的。现在我们主要采用sae国际标准去划分自动驾驶等级。根据机器自动化的的程度,主要可以划分6个等级,如下所示:
28.(1)l0:完全人工驾驶,只由驾驶者去执行对汽车的操纵,没有计算机辅助驾驶系统。
29.(2)l1:辅助驾驶,传感器只负责采集数据,驾驶人员根据驾驶环境信息进行相关驾驶操作。
30.(3)l2:半自动自动驾驶,是指计算机系统能执行基本的驾驶操作,如车道保持等基本驾驶操作。
31.(4)l3:高度自动驾驶,计算机系统可以执行所有驾驶操作,但在特殊情况发生时,驾驶人员需要对计算机系统的提示做出回应。
32.(5)l4:超高度自动驾驶,计算机系统也可以执行所有驾驶操作,但在特殊情况发生时,驾驶人员可以选择不对计算机系统的提示做出回应。
33.(6)l5:完全无人驾驶,其由传感器对路况信息进行采集,计算机系统进行分析最终直接执行对汽车的控制,无需任何人工干预措施。
34.目前我们还是停留在第四等级和第五等级的研发,距离真正的完全无人驾驶还存在一定的差距。
35.便宜:相对于几十万的激光雷达来说更便宜;
36.便捷:体积小,更适用于车载系统;
37.国内市场空白:77ghz毫米波雷达处于起步阶段。
38.该模拟系统主要是在实验室搭建的模拟场景下进行测试,从而避免了路面测试意外的发生。根据驾驶模拟系统测试分析结果实现对整个系统的有效性和可靠性进行评估,进而为真实路面测试奠定了一定的基础。
39.随着汽车领域的快速发展,智能驾驶系统的设计与研究对于智能交通的发展具有重大意义。本文提出并设计了一套基于awr1843毫米波雷达的智能驾驶模拟系统,并对该模拟系统在实验室模拟环境下进行了测试与分析,其总结如下:
40.(1)系统硬件电路设计。针对无人驾驶场景的特点,设计整个驾驶系统的硬件电路。通过对各类传感器特性的对比,本设计采用openmv4视觉处理器实现对路线的检测,对于障碍信息的检测,本文则是采用精度更高、范围更广的毫米波雷达去实现该功能。本系统还搭载了各种环境传感器,能够实现空气中温湿度、烟感、光强等环境信息的实时检测。这些信息可以通过无线传输设备将路面图像信息传输至控制显示台。
41.(2)系统软件算法研究。本系统采用pid控制算法实现对整个驾驶系统转速的闭环控制,增强了整个系统的稳定性。并通过机器学习算法、图像识别算法实时计算当前的路线的曲率和偏移角度,主控系统根据这些数据实时控制仿真车的运动状态,从而实现无人工干预下的自适应巡航。
42.(3)针对设计的主要功能进行测试分析,对各个功能进行验证,分析每个功能的实际应用效果,结合实际测试对整个模拟驾驶系统的有效性和可靠性进行评估,最终系统测试结果基本符合实验预期。
43.以上所述,仅是本实用新型的较佳实施例而已,并非是对本实用新型作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例应用于其它领域,但是凡是未脱离本实用新型技术方案内容,依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本实用新型技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1