一种模块化U盘智能生产线实训系统的制作方法
本技术涉及智能制造平台教学应用,尤其涉及一种模块化u盘智能生产线实训系统。
背景技术:
1、随着智能制造技术的不断深入,工业机器人及自动化生产线系统面临前所未有的发展时机,而在u盘的生产步骤中,目前主要是靠工人手工装配或在其中工序增设半自动化设备协助装配,这无疑会降低u盘的生产效率,影响企业的竞争力;因此,近年来,企业对于u盘生产的要求也就越来越高,对u盘自动化智能化生产的人才的需求也越来越高。目前一些高校已经开设了相关的生产线自动化课程,然而现有的自动化生产线实训系统往往跟不上智能化定制化生产的需要,对于高校和技术人员的培训,缺乏合适的实训平台,无法系统的培训学生实际操作能力。经检索,中国专利文献库中也没有相关的专利文献。
技术实现思路
1、本实用新型的目的是提供一种功能齐全、自动化程度高、可以实现单机和联机操作的、仿真程度更高的模块化u盘智能生产线实训系统。
2、为了实现上述目的,本实用新型采用了如下技术方案:
3、提供一种模块化u盘智能生产线实训系统,包括产线总控单元、产品输送单元、以及沿产品输送单元的前进方向依次设置的
4、坯料仓储单元,用以存放装u盘坯料零配件的托盘;
5、agv坯料搬运单元,用以在坯料仓储单元与所述产品输送单元前端之间转运装u盘坯料零配件的托盘;
6、cnc外壳加工单元用以加工u盘外壳;
7、外壳检测单元用以检测u盘外壳加工尺寸;
8、零配件装配单元用以将u盘坯料零配件组装起来;
9、外壳激光打标单元用以定制化打标各种logo、字符;
10、成品检测单元用以检测u盘组装结果;
11、u盘打包单元用以将组装好的u盘包装;
12、agv成品搬运单元用以在所述产品输送单元末端与成品仓储单元之间转运装u盘成品的托盘;
13、成品仓储单元用以存放装有u盘成品的托盘;
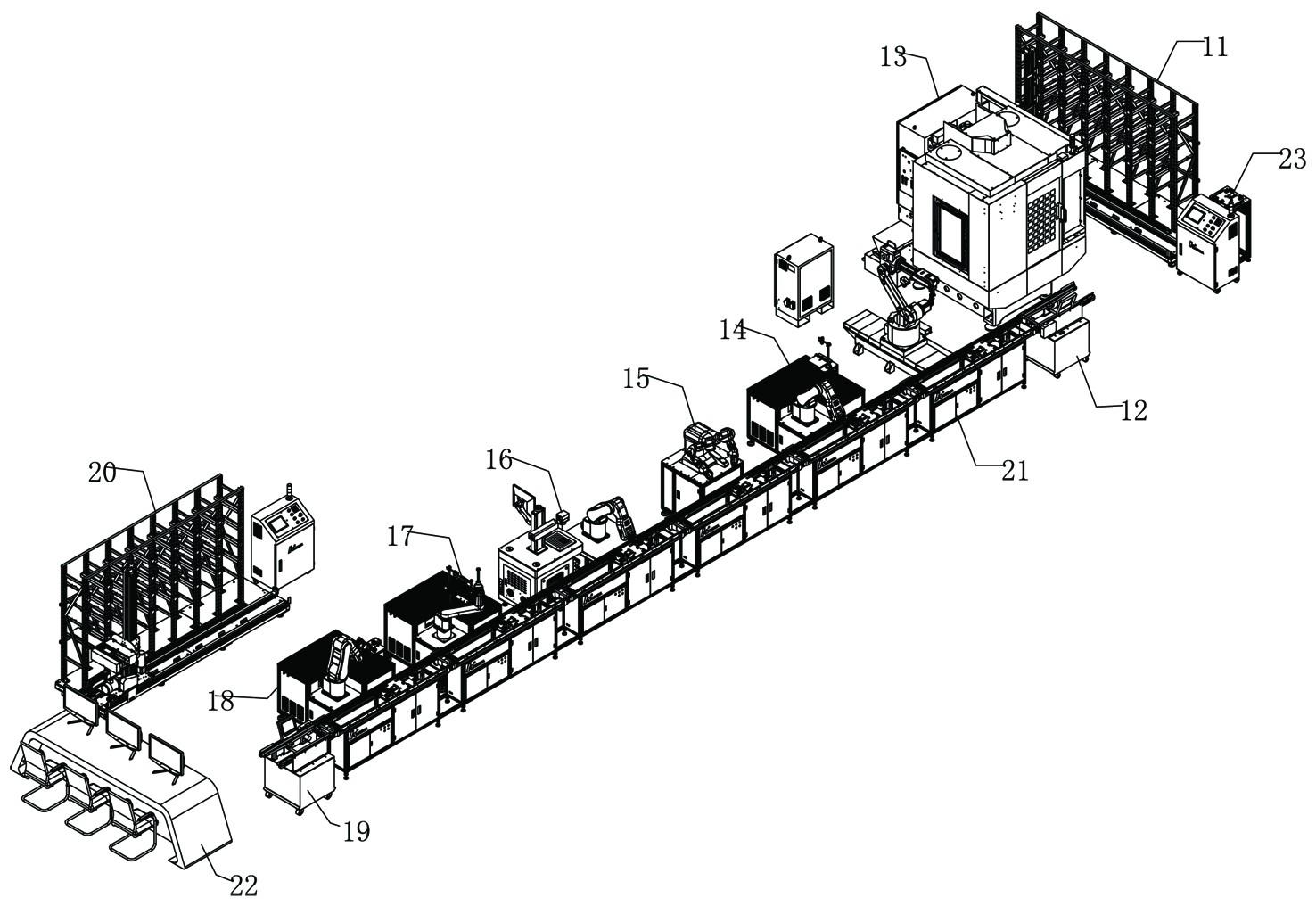
14、所述产线总控单元用于控制各上述单元协同工作将u盘坯料零配件完成生产加工组装,所述产品输送单元前端与agv坯料搬运单元对接,所述产品输送单元后端与agv成品搬运单元对接;所述产品输送单元由六段相同的输送线拼接组成,所述输送线包括机架、位于机架上的输送带、电机驱动系统、rfid读写系统、光电传感器、顶升定位机构和阻挡机构,所述电机驱动系统用于驱动输送带运转,所述rfid读写系统用来读写托盘信息,所述光电传感器用于感知托盘的位置,所述顶升定位机构用以把托盘顶升定位,所述阻挡机构用于阻止或放行托盘。
15、作为本实用新型的改进,所述产线总控单元包括系统控制台和位于系统控制台上的计算机,所述计算机安装有mes系统、产线总控软件和仿真软件。
16、作为本实用新型的改进,所述坯料仓储单元包括立体仓库,位于立体仓库一侧的码垛机,以及仓储控制系统,所述立体仓库可以存放托盘,所述码垛机可以在立体仓库与agv坯料搬运单元对接转运托盘,所述仓储控制系统用于控制码垛机的运动。
17、作为本实用新型的改进,所述agv坯料搬运单元包括agv本体、位于agv本体上的输送皮带线,以及控制系统,所述输送皮带线用于接收和输送托盘,所述控制系统用于控制agv运动路径和速度。
18、作为本实用新型的改进,所述cnc外壳加工单元包括cnc、位于cnc一侧的七轴工业机器人、安装在七轴工业机器人上的机器人夹具,以及位于cnc内的cnc工装夹具,所述cnc用于加工u盘外壳, 所述七轴工业机器人结合机器人夹具可以在所述输送线上的托盘与cnc工装夹具之间取放u盘外壳。
19、作为本实用新型的改进,所述外壳检测单元包括第一工作台、位于第一工作台上的第一视觉检测系统、第二六轴工业机器人,及第二机器人夹具,所述第二六轴工业机器人结合第二机器人夹具在第一视觉检测系统与所述产品输送单元之间取放u盘外壳,所述第一视觉检测系统用以检测u盘外壳。
20、作为本实用新型的改进,所述零配件装配单元包括第二工作台,以及放置在第二工作台上的双臂协作机器人,所述双臂协作机器人用以抓取装配所述产品输送单元上的托盘的u盘配件。
21、作为本实用新型的改进,所述外壳激光打标单元包括机安装台、位于安装台上的激光打标机、机器人底座、位于机器人底座上的第三六轴工业机器人和第一机器人吸盘夹具,所述激光打标机可以在u盘外壳上打标,所述第三六轴工业机器人结合第一机器人吸盘夹具以及机器人底座在所述产品输送单元上的托盘与激光打标机之间取放u盘。
22、作为本实用新型的改进,所述成品检测单元包括第三工作台、位于第三工作台上的scara机器人、第二视觉检测系统,以及安装在scara机器人上的第二机器人吸盘夹具,所述scara机器人结合第二机器人吸盘夹具用于在所述产品输送单元上的托盘与第二视觉检测系统之间取放u盘,所述第二视觉检测系统用以检测u盘装配情况。
23、作为本实用新型的改进,所述u盘打包单元包括第四工作台、位于第四工作台上的第四六轴工业机器人、打包机构,以及位于第四六轴工业机器人上的第三机器人吸盘夹具,所述第四六轴工业机器人结合第三机器人吸盘夹具在所述产品输送单元上的托盘与打包机构之间取放u盘。
24、本实用新型由于包括产线总控单元、产品输送单元、以及沿产品输送单元的前进方向依次设置的坯料仓储单元,用以存放装u盘坯料零配件的托盘;agv坯料搬运单元,用以在坯料仓储单元与所述产品输送单元前端之间转运装u盘坯料零配件的托盘;cnc外壳加工单元用以加工u盘外壳;外壳检测单元用以检测u盘外壳加工尺寸;零配件装配单元用以将u盘坯料零配件组装起来;外壳激光打标单元用以定制化打标各种logo、字符;成品检测单元用以检测u盘组装结果;u盘打包单元用以将组装好的u盘包装;agv成品搬运单元用以在所述产品输送单元末端与成品仓储单元之间转运装u盘成品的托盘;成品仓储单元用以存放装有u盘成品的托盘;本实用新型中,通过产线总控单元接收与发送用户在人机交互界面的控制指令及实时显示运行情况,所述产线总控单元控制各上述单元协同工作将u盘坯料零配件完成生产加工组装,各个单元具备单机与联机两种模式,通过产线总控单元操作单机或联机切换可实现单元独立运行与全线联机运行两种模式的切换,根据本实用新型提供的方案,通过对模块化u盘智能生产线进行实训操作,可以使对u盘生产组装打包全过程再现、模拟仿真,根据实际应用场景进行适应性调整,有利于学生系统的培训,因此,本实用新型具有功能齐全、自动化程度高、可以实现单机和联机操作的、仿真程度更高的优点。
技术特征:
1.一种模块化u 盘智能生产线实训系统,其特征在于:包括产线总控单元(22)、产品输送单元(21)、以及沿产品输送单元(21)的前进方向依次设置的
2.根据权利要求1所述的模块化u 盘智能生产线实训系统,其特征在于:所述产线总控单元(22)包括系统控制台(221)和位于系统控制台(221)上的计算机(222)。
3.根据权利要求2所述的模块化u 盘智能生产线实训系统,其特征在于:所述坯料仓储单元(11)包括立体仓库(112),位于立体仓库(112)一侧的码垛机(111),以及仓储控制系统(113),所述立体仓库(112)可以存放托盘,所述码垛机(111)可以在立体仓库(112)与agv坯料搬运单元(12)对接转运托盘,所述仓储控制系统(113)用于控制码垛机(111)的运动。
4.根据权利要求3所述的模块化u 盘智能生产线实训系统,其特征在于:所述agv坯料搬运单元(12)包括agv本体(121)、位于agv本体(121)上的输送皮带线(122),以及控制系统(123),所述输送皮带线(122)用于接收和输送托盘,所述控制系统(123)用于控制agv运动路径和速度。
5.根据权利要求4所述的模块化u 盘智能生产线实训系统,其特征在于: 所述cnc外壳加工单元(13)包括cnc(131)、位于cnc(131)一侧的七轴工业机器人(132)、安装在七轴工业机器人(132)上的机器人夹具(133),以及位于cnc(131)内的cnc工装夹具(134),所述cnc(131)用于加工u盘外壳, 所述七轴工业机器人(132)结合机器人夹具(133)可以在所述输送线(211)上的托盘与cnc工装夹具(134)之间取放u盘外壳。
6.根据权利要求5所述的模块化u 盘智能生产线实训系统,其特征在于: 所述外壳检测单元(14)包括第一工作台(141)、位于第一工作台(141)上的第一视觉检测系统(142)、第二六轴工业机器人(143),及第二机器人夹具(144),所述第二六轴工业机器人(143)结合第二机器人夹具(144)在第一视觉检测系统(142)与所述产品输送单元(21)之间取放u盘外壳,所述第一视觉检测系统(142)用以检测u盘外壳。
7.根据权利要求6所述的模块化u 盘智能生产线实训系统,其特征在于: 所述零配件装配单元(15)包括第二工作台(152),以及放置在第二工作台(152)上的双臂协作机器人(151),所述双臂协作机器人(151)用以抓取装配所述产品输送单元(21)上的托盘(110)的u盘配件。
8.根据权利要求7所述的模块化u 盘智能生产线实训系统,其特征在于: 所述外壳激光打标单元(16)包括机安装台(160)、位于安装台(160)上的激光打标机(161)、机器人底座(164)、位于机器人底座(164)上的第三六轴工业机器人(162)和第一机器人吸盘夹具(163),所述激光打标机(161)可以在u盘外壳上打标,所述第三六轴工业机器人(162)结合第一机器人吸盘夹具(163)以及机器人底座(164)在所述产品输送单元(21)上的托盘(110)与激光打标机(161)之间取放u盘。
9.根据权利要求8所述的模块化u 盘智能生产线实训系统,其特征在于: 所述成品检测单元(17)包括第三工作台(173)、位于第三工作台(173)上的scara机器人(171)、第二视觉检测系统(172),以及安装在scara机器人(171)上的第二机器人吸盘夹具(174),所述scara机器人(171)结合第二机器人吸盘夹具(174)用于在所述产品输送单元(21)上的托盘与第二视觉检测系统(172)之间取放u盘,所述第二视觉检测系统(172)用以检测u盘装配情况。
10.根据权利要求9所述的模块化u 盘智能生产线实训系统,其特征在于: 所述u盘打包单元(18)包括第四工作台(182)、位于第四工作台(182)上的第四六轴工业机器人(181)、打包机构(183),以及位于第四六轴工业机器人(181)上的第三机器人吸盘夹具(184),所述第四六轴工业机器人(181)结合第三机器人吸盘夹具(184)在所述产品输送单元(21)上的托盘与打包机构(183)之间取放u盘。
技术总结
一种模块化U盘智能生产线实训系统,包括产线总控单元、产品输送单元、以及沿产品输送单元依次设置的坯料仓储单元、AGV坯料搬运单元、CNC外壳加工单元、外壳检测单元、零配件装配单元、外壳激光打标单元、成品检测单元、U盘打包单元、AGV成品搬运单元和成品仓储单元,因此,本技术具有功能齐全、自动化程度高、可以实现单机和联机操作的、仿真程度更高的优点。
技术研发人员:梁泳生,蔡松明,姚伟津,何正文,陈飞,马玉龙
受保护的技术使用者:深圳华数机器人有限公司
技术研发日:20221230
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!