一种车道识别数据合并方法及系统与流程
本发明属于地图制作领域,尤其涉及一种车道识别数据合并方法及系统。
背景技术:
1、在制作地图或更新地图时,通常需要实景采集道路车道信息,以提高地图制作精度。一般通过车载相机采集路面图像,通过计算机视觉处理等技术可以识别出车道线及其位置,从而构造出道路面的车道线。然而,由于常用的车载相机视野受限,对于同一位置可观测车道可能有限,如车载相机最多只能采集当前车道和当前车道的左右两条车道,如果道路并行的车道数大于三个,或者车辆不行驶在中间车道上,那车载相机就不能采集到此处的完整道路车道信息,由此可能会导致道路地图绘制错误。
技术实现思路
1、有鉴于此,本发明实施例提供了一种车道识别数据合并方法及系统,用于解决现有同一位置车道识别不准确,导致地图绘制错误的问题。
2、在本发明实施例的第一方面,提供了一种车道识别数据合并方法,包括:
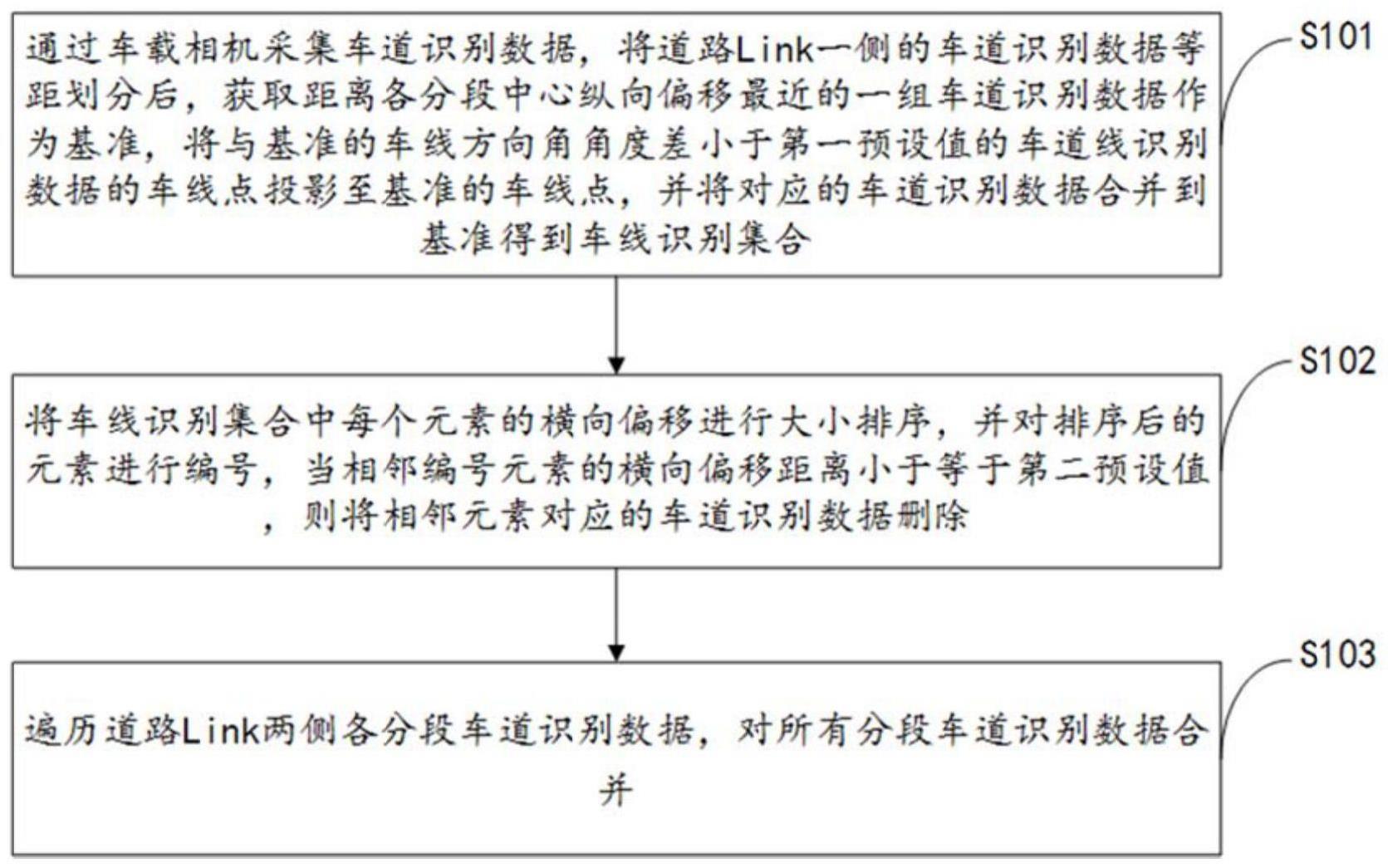
3、通过车载相机采集车道识别数据,将道路link一侧的车道识别数据等距划分后,获取距离各分段中心纵向偏移最近的一组车道识别数据作为基准,将与基准的车线方向角角度差小于第一预设值的车道线识别数据的车线点投影至基准的车线点,并将对应的车道识别数据合并到基准得到车线识别集合;
4、将车线识别集合中每个元素的横向偏移进行大小排序,并对排序后的元素进行编号,当相邻编号元素的横向偏移距离小于第二预设值,则将相邻元素对应的车道识别数据删除;
5、其中,车线点的纵向偏移为车线点所在直线与道路link的垂直交点到link起点的距离,元素的横向偏移为车线点到道路link的距离。
6、遍历道路link两侧各分段车道识别数据,对所有分段车道识别数据合并。
7、在本发明实施例的第二方面,提供了一种用于车道识别数据合并的系统,包括:
8、分段合并模块,用于通过车载相机采集车道识别数据,将道路link一侧的车道识别数据等距划分后,获取距离各分段中心纵向偏移最近的一组车道识别数据作为基准,将与基准的车线方向角角度差小于第一预设值的车道线识别数据的车线点投影至基准的车线点,并将对应的车道识别数据合并到基准得到车线识别集合;
9、删除模块,用于将车线识别集合中每个元素的横向偏移进行大小排序,并对排序后的元素进行编号,当相邻编号元素的横向偏移距离小于第二预设值,则将相邻元素对应的车道识别数据删除;
10、其中,其中,车线点的纵向偏移为车线点所在直线与道路link的垂直交点到link起点的距离,元素的横向偏移为车线点到道路link的距离。
11、综合处理模块,用于遍历道路link两侧各分段车道识别数据,对所有分段车道识别数据合并。
12、在本发明实施例的第三方面,提供了一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器运行的计算机程序,所述处理器执行所述计算机程序时实现如本发明实施例第一方面所述方法的步骤。
13、在本发明实施例的第四方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现本发明实施例第一方面提供的所述方法的步骤。
14、本发明实施例中,基于同一路段的用户行驶数据,通过对道路两侧的车道识别数据进行合并、删除等处理,可以保留完整的车道信息,并去除冗余数据,从而实现基于车载相机的完整道路信息收集,保障同一位置车道识别的完整性、准确性,避免地图绘制错误。同时,能降低地图制作成本,方便地图更新。
技术特征:
1.一种车道识别数据合并方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述车道识别数据包括车道识别数据和车线识别数据,所述车道识别数据中包括识别的车线、车线方向角、扩展交点和纵向偏移,所述车线识别数据中包括车线点、横向偏移和车线类型;
3.根据权利要求1所述的方法,其特征在于,所述将与基准的车线方向角角度差小于第一预设值的车道线识别数据的车线点投影至基准的车线点,并将对应的车道识别数据合并到基准得到车线识别集合包括:
4.一种用于车道识别数据合并的系统,其特征在于,至少包括:
5.根据权利要求4所述的系统,其特征在于,所述车道识别数据包括车道识别数据和车线识别数据,所述车道识别数据中包括识别的车线、车线方向角、扩展交点和纵向偏移,所述车线识别数据中包括车线点、横向偏移和车线类型;
6.根据权利要求4所述的系统,其特征在于,所述将与基准的车线方向角角度差小于第一预设值的车道线识别数据的车线点投影至基准的车线点,并将对应的车道识别数据合并到基准得到车线识别集合包括:
7.一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至3任一项所述的一种车道识别数据合并方法的步骤。
8.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被执行时实现如权利要求1至3任一项所述的一种车道识别数据合并方法的步骤。
技术总结
本发明提供一种车道识别数据合并方法及系统,该方法包括:通过车载相机采集车道识别数据,将道路Link一侧的车道识别数据等距划分后,获取距离各分段中心纵向偏移最近的一组车道识别数据作为基准,将与基准的车线方向角角度差小于第一预设值的车线点投影至基准的车线点,并将对应的车道识别数据合并到基准得到车线识别集合;将车线识别集合中每个元素的横向偏移进行大小排序,并对排序后的元素进行编号,当相邻编号元素的横向偏移距离小于第二预设值,则将相邻元素对应的车道识别数据删除;遍历道路Link两侧各分段车道识别数据,对所有分段车道识别数据合并。通过该方案可以保障车道识别数据的完整性、准确性,避免地图绘制出现错误。
技术研发人员:王军德,余俊
受保护的技术使用者:武汉光庭信息技术股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!