一种无人机植保飞防教学系统
本发明涉及无人机,具体涉及一种无人机植保飞防教学系统。
背景技术:
1、无人驾驶飞机,简称无人机(unmanned aerial vehicle,简称uav),是一种利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。无人机的用途广泛,经常被应用于农业植保、城市管理、地质、气象、电力、抢险救灾、视频拍摄等行业。
2、随着无人机植保技术的发展,以及无人机植保具有的作业效率高、防治效果好、运行成本低、环境污染小等特点,越来越多的农户或农场主开始采用无人机进行植保作业,特别是利用植保无人机进行农药喷洒和化肥喷洒等。
3、而其中的无人机植保飞防教学主要依托生产型植保无人机开展,在校园内选取空地简单模拟无人机植保飞防作业环境,但在教学开展中存在以下几个方面的问题:
4、1.无人机植保飞防作业实训教学需要依托大面积农田开展,而绝大多数校园不具备此条件。
5、2.室外教学受天气影响大,大风、雨雪等天气难以正常开展教学。
技术实现思路
1、针对现有技术存在的不足,本发明提出一种无人机植保飞防教学系统,通过在室内设置模拟沙盘,还原无人机植保飞防真实作业场景,解决现有教学中作业场景缺失的问题。
2、一种无人机植保飞防教学系统,包括沙盘、植保无人机及多个地块;所述沙盘安装于室内,用于模拟多样化无人机植保飞防作业场景;多个所述地块均设于所述沙盘上,用于安装农作物模型;所述植保无人机,用于在所述沙盘内执行植保作业。
3、进一步的,所述植保无人机上设有超声波雷达发射探头,所述沙盘上等间距设置有四个杆状物,每个所述杆状物上均设有信号接收基站;
4、所述信号接收基站用于接收所述超声波雷达发射探头的信号,并通过信号传输时间实时计算所述超声波雷达发射探头和所述信号接收基站之间的准确距离。
5、进一步的,获取雷达发射探头的坐标;
6、通过计算
7、获取雷达发射探头的坐标p(x,y,z);
8、其中,四个所述信号接收基站的坐标分别为a(xa,ya,za)、b(xb,yb,zb)、c(xc,yc,zc)、d(xd,yd,zd),超声波从发射探头传递到接收基站的时间分别为ta、tb、tc、td,超声波传播速度为v。
9、进一步的,所述植保无人机上设有仿地雷达,所述仿地雷达用于监控所述植保无人机距离地面的距离。
10、进一步的,所述植保无人机包括自动航线飞行模式和手动飞行模式。
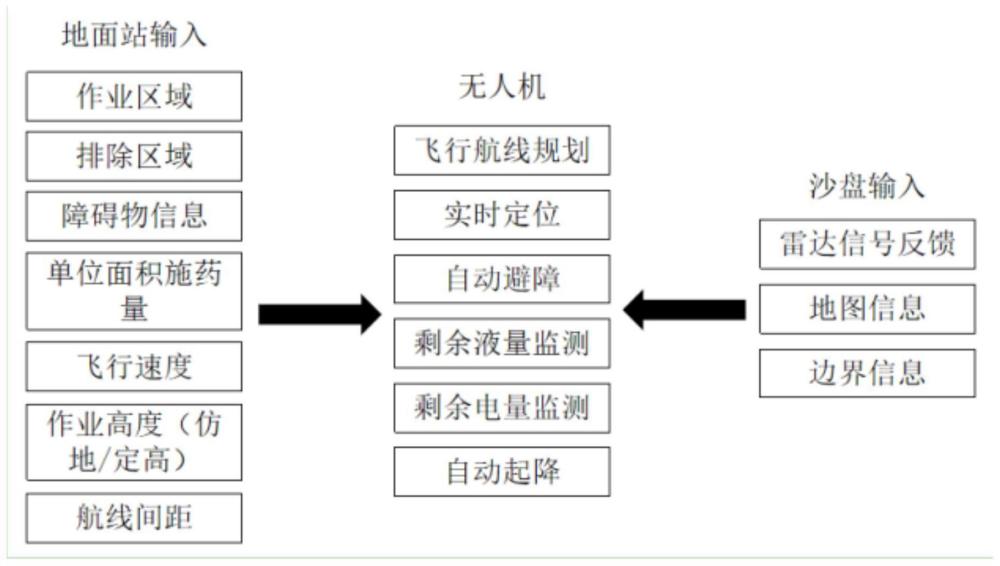
11、进一步的,还包括地面站,所述地面站内设有沙盘地图,所述沙盘地图用于获取所述沙盘地块、地貌的位置和界线及所述植保无人机的实时位置。
12、进一步的,所述地面站用于设置航线间距和航高。
13、进一步的,所述航高包括定高模式和仿地飞行模式。
14、进一步的,所述地块上设有隔层,所述隔层上设有水敏试纸,所述水敏试纸用于承接雾滴。
15、采用上述技术方案的发明,具有如下优点:
16、1.本发明通过在室内设置模拟沙盘,还原无人机植保飞防真实作业场景,解决现有教学中作业场景缺失的问题。
17、2.本发明通过将传统植保无人机进行缩小、简化,改造为适宜在室内安全飞行,满足实际教学需求的植保无人机。
18、3.本发明通过超声波雷达发射探头、信号接收基站、仿地雷达等装置,实现无人机位置的精准控制。
19、4.本发明通过在地面下部设置隔层,利用水平试纸测定实际施药喷雾质量果,对学生的任务完成情况进行评价。通过以上方面,提高无人机植保飞防教学的实训质量。
技术特征:
1.一种无人机植保飞防教学系统,其特征在于,包括:沙盘、植保无人机及多个地块;
2.根据权利要求1所述的一种无人机植保飞防教学系统,其特征在于,所述植保无人机上设有超声波雷达发射探头,所述沙盘上等间距设置有四个杆状物,每个所述杆状物上均设有信号接收基站;
3.根据权利要求2所述的一种无人机植保飞防教学系统,其特征在于,获取雷达发射探头的坐标;
4.根据权利要求1所述的一种无人机植保飞防教学系统,其特征在于,所述植保无人机上设有仿地雷达,所述仿地雷达用于监控所述植保无人机距离地面的距离。
5.根据权利要求1所述的一种无人机植保飞防教学系统,其特征在于,所述植保无人机包括自动航线飞行模式和手动飞行模式。
6.根据权利要求1所述的一种无人机植保飞防教学系统,其特征在于,还包括地面站,所述地面站内设有沙盘地图,所述沙盘地图用于获取所述沙盘地块、地貌的位置和界线及所述植保无人机的实时位置。
7.根据权利要求6所述的一种无人机植保飞防教学系统,其特征在于,所述地面站用于设置航线间距和航高。
8.根据权利要求7所述的一种无人机植保飞防教学系统,其特征在于,所述航高包括定高模式和仿地飞行模式。
9.根据权利要求1所述的一种无人机植保飞防教学系统,其特征在于,所述地块上设有隔层,所述隔层上设有水敏试纸,所述水敏试纸用于承接雾滴。
技术总结
本发明涉及无人机技术领域,公开了一种无人机植保飞防教学系统,包括沙盘、植保无人机及多个地块;沙盘安装于室内,用于模拟多样化无人机植保飞防作业场景;多个地块均设于沙盘上,用于安装农作物模型;植保无人机,用于在沙盘内执行植保作业。上述的一种无人机植保飞防教学系统,通过在室内设置模拟沙盘,还原无人机植保飞防真实作业场景,解决现有教学中作业场景缺失的问题。
技术研发人员:任勇,夏远平,任建强,孙启候
受保护的技术使用者:重庆电子工程职业学院
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!