一种伞降模拟器的模拟仓的制作方法
本技术涉及伞降模拟器,具体为一种伞降模拟器的模拟仓。
背景技术:
1、随着科技的发展,模拟器行业发展越来越迅速,伞降需要足够的经验才能进行的运动,人们现在不需要做起直升机背起降落伞进行训练或体验,在模拟器即可完成,传统的用于伞降模拟训练的伞降模拟器基本可以满足人们的使用需求。
2、但是就现有设备而言,市场上大多数用于伞降模拟训练的伞降模拟器只有失重悬空的感觉,即使搭配了vr设备,也只是在视觉上有了伞降体验,而无法模拟各种动作,如风吹动降落伞产生晃动后,手动转向的操作,从而导致体验感不够完美,鉴于此,本申请提出了一种伞降模拟器的模拟仓。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种伞降模拟器的模拟仓,具备体验感加强等优点。
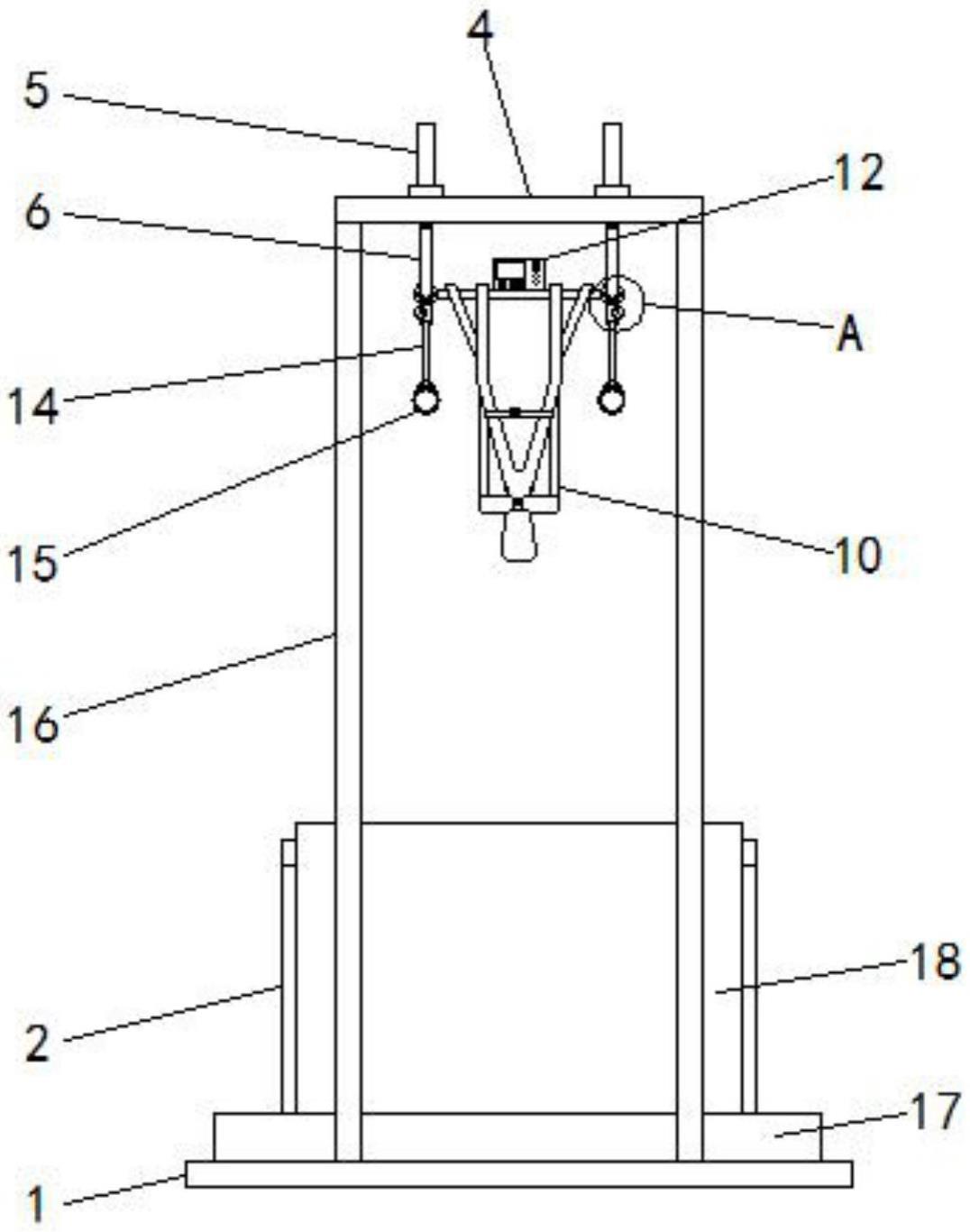
2、为实现上述目的,本实用新型提供如下技术方案:一种伞降模拟器的模拟仓,包括底板,底板上安装有台座,台座上安装有后置架,后置架顶端设有顶板,所述顶板上设有活动导轨组件,所述活动导轨组件上设有安全带,所述活动导轨组件上且位于安全带的两侧均设有方向调整组件;
3、所述活动导轨组件包括4个呈矩阵形式分布设置在顶板顶部并延伸至顶板下方的伸缩杆,所述伸缩杆活动端设有连接柱,左右两侧的两个所述连接柱之间各焊接有导轨柱,每个所述导轨柱的表面均设有两个滑套,两个导轨柱上的滑套之间焊接有与安全带连接的横柱;
4、所述方向调整组件包括固定安装在滑套底部的拉力传感器,所述拉力传感器底端活动安装有手拉绳,所述手拉绳底端设有拉环。
5、进一步,所述台座的长度小于底板的长度,底板的顶部固定安装有与顶板焊接在一起的前支柱。
6、进一步,所述导轨柱的长度大于台座的长度,滑套与导轨柱滑动连接。
7、进一步,两个所述横柱之间焊接有连接板,连接板的顶部固定安装有控制器。
8、进一步,所述拉力传感器设置有两个,两个拉力传感器分别位于安全带的两侧,拉力传感器和伸缩杆均通过导线与控制器电性连接。
9、进一步,所述底板的顶部且位于台座的正面固定安装有海绵缓冲垫,海绵缓冲垫的厚度不低于15厘米,海绵缓冲垫靠近台座的一侧固定安装有与台座正面的棱边固定连接的包边防护垫。
10、与现有技术相比,本实用新型提供了一种伞降模拟器的模拟仓,具备以下有益效果:
11、该伞降模拟器的模拟仓,通过控制器可直接控制伸缩杆伸缩,从而改变两个导轨柱的倾斜方向,进而让体验者同步倾斜,以此来模仿伞降过程中,自然风吹动伞,导致伞摆动的情况,从而让体验者在佩戴vr设备后更加直观、真实的享受到伞降的乐趣,同时,利用拉力传感器来连接滑套和手拉绳,而拉力传感器则直接与控制器连接着,当导轨柱的倾斜后,可通过拉动另一侧的拉环,让拉力传感器感受到拉力,从而利用拉力传感器将信号传给控制器然后有控制器再度控制伸缩杆伸缩,伸缩杆会根据拉力传感器的数值进行调整,以此来模仿正视伞降过程中,体验者亲自回正自身的操作,从而进一步提升了体验感。
技术特征:
1.一种伞降模拟器的模拟仓,包括底板(1),底板(1)上安装有台座(2),台座(2)上安装有后置架(3),后置架(3)顶端设有顶板(4),其特征在于:所述顶板(4)上设有活动导轨组件,所述活动导轨组件上设有安全带(10),所述活动导轨组件上且位于安全带(10)的两侧均设有方向调整组件;
2.根据权利要求1所述的一种伞降模拟器的模拟仓,其特征在于:所述台座(2)的长度小于底板(1)的长度,底板(1)的顶部固定安装有与顶板(4)焊接在一起的前支柱(16)。
3.根据权利要求1所述的一种伞降模拟器的模拟仓,其特征在于:所述导轨柱(7)的长度大于台座(2)的长度,滑套(8)与导轨柱(7)滑动连接。
4.根据权利要求1所述的一种伞降模拟器的模拟仓,其特征在于:两个所述横柱(9)之间焊接有连接板(11),连接板(11)的顶部固定安装有控制器(12)。
5.根据权利要求4所述的一种伞降模拟器的模拟仓,其特征在于:所述拉力传感器(13)设置有两个,两个拉力传感器(13)分别位于安全带(10)的两侧,拉力传感器(13)和伸缩杆(5)均通过导线与控制器(12)电性连接。
6.根据权利要求1所述的一种伞降模拟器的模拟仓,其特征在于:所述底板(1)的顶部且位于台座(2)的正面固定安装有海绵缓冲垫(17),海绵缓冲垫(17)的厚度不低于15厘米,海绵缓冲垫(17)靠近台座(2)的一侧固定安装有与台座(2)正面的棱边固定连接的包边防护垫。
技术总结
本技术涉及一种伞降模拟器的模拟仓,包括底板,底板上安装有台座,台座上安装有后置架,后置架顶端设有顶板,所述顶板上设有活动导轨组件,所述活动导轨组件上设有安全带,所述活动导轨组件上且位于安全带的两侧均设有方向调整组件。该伞降模拟器的模拟仓,利用拉力传感器来连接滑套和手拉绳,而拉力传感器则直接与控制器连接着,当导轨柱的倾斜后,可通过拉动另一侧的拉环,让拉力传感器感受到拉力,从而利用拉力传感器将信号传给控制器然后有控制器再度控制伸缩杆伸缩,伸缩杆会根据拉力传感器的数值进行调整,以此来模仿正视伞降过程中,体验者亲自回正自身的操作,从而进一步提升了体验感。
技术研发人员:梁琳,叶亮
受保护的技术使用者:中仿智能科技(上海)股份有限公司
技术研发日:20230131
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!