一种模块化多自由度运动平台的制作方法
本技术涉及运动仿真,具体为一种模块化多自由度运动平台。
背景技术:
1、多自由度运动平台主要由上平台(负载平台)、下平台(固定平台)、多只直线驱动机构以及控制系统等组成。多自由度运动平台可以在工作空间范围内模拟出多个自由度的运动姿态,可广泛应用到飞行模拟器、舰艇模拟器、坦克模拟器、汽车驾驶模拟器等半实物训练仿真领域。然而现有的上平台和下平台均为一体成型,现场安装时单体重量较重,不便安装,影响安装精度。不同型号的多自由度运动平台中的上平台和下平台均需要进行单独设计和制造,影响多自由度运动平台设计和制造效率。
技术实现思路
1、本实用新型的目的在于提供一种模块化多自由度运动平台,以解决上述背景技术中的问题之一。
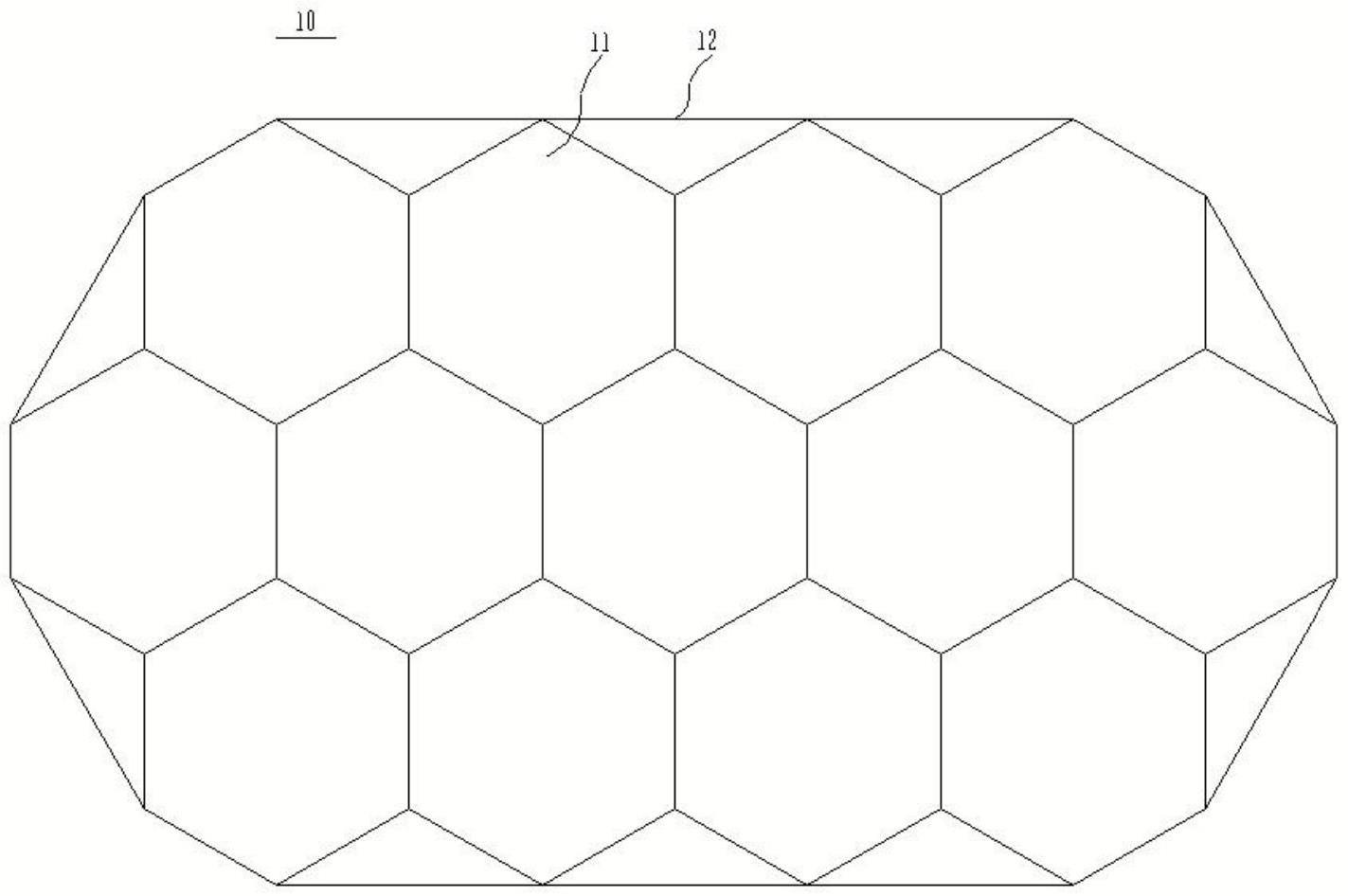
2、为实现上述目的,本实用新型提供如下技术方案:一种模块化多自由度运动平台,包括上平台、下平台、驱动机构和控制装置;所述上平台设置在下平台的上方,所述驱动机构的两端分别铰接于上平台和下平台,所述控制装置通信连接驱动机构;所述上平台包括多个第一多边形模块和多个第一连接条,多个所述第一多边形模块平铺设置,相邻的两个第一多边形模块彼此固定连接,相邻的两个第一多边形模块的外围顶点通过第一连接条固定连接。
3、在本实用新型的一些实施例中,所述驱动机构的数量为3-6个。
4、在本实用新型的一些实施例中,所述驱动机构的数量为6个,6个所述驱动机构与上平台的铰接点的编号为ai(i=1,2,……6),6个所述驱动机构30与下平台的铰接点的编号为bi(i=1,2,……6);铰接点a1至铰接点a6依次连线构成一个六边形,该六边形的内角均为120度;铰接点b1至铰接点b6依次连线构成一个六边形,该六边形的内角均为120度。
5、在本实用新型的一些实施例中,所述驱动机构为直线电机或者气缸或者液压缸。
6、在本实用新型的一些实施例中,所述第一多边形模块为正多边形或者矩形。
7、在本实用新型的一些实施例中,所述第一多边形模块为正三角形、正方形、正五边形、正六边形、正七边形或者正八边形。
8、在本实用新型的一些实施例中,所述第一多边形模块为正六边形,所述上平台包括三组第一多边形模块,位于中间一组的第一多边形模块的数量比位于两侧一组的第一多边形模块的数量大1。
9、在本实用新型的一些实施例中,所述下平台包括多个第二多边形模块和多个第二连接条,多个所述第二多边形模块平铺设置,相邻的两个第二多边形模块彼此固定连接,相邻的两个第二多边形模块的外围顶点通过第二连接条固定连接。
10、在本实用新型的一些实施例中,所述第二多边形模块为正多边形或者矩形。
11、在本实用新型的一些实施例中,所述第二多边形模块为正六边形,所述下平台包括一个位于中心的第二多边形模块以及三个位于外围的第二多边形模块,三个位于外围的第二多边形模块彼此不相邻地连接于位于中心的第二多边形模块。
12、与现有技术相比,本实用新型的有益效果是:
13、本实用新型的实施例中上平台由多个第一多边形模块和多个第一连接条拼装而成,第一多边形模块和第一连接条重量较轻,方便现场安装,可以保持较高的安装精度。根据工艺需要,可以采用相应数量的第一多边形模块和第一连接条拼接获得上平台,可以提升上平台的设计和制造效率。下平台由多个第二多边形模块和多个第二连接条拼装而成,第二多边形模块和第二连接条重量较轻,方便现场安装,可以保持较高的安装精度。根据工艺需要,可以采用相应数量的第二多边形模块和第二连接条拼接获得下平台,可以提升下平台的设计和制造效率。
技术特征:
1.一种模块化多自由度运动平台,其特征在于:包括上平台、下平台、驱动机构和控制装置;所述上平台设置在下平台的上方,所述驱动机构的两端分别铰接于上平台和下平台,所述控制装置通信连接驱动机构;所述上平台包括多个第一多边形模块和多个第一连接条,多个所述第一多边形模块平铺设置,相邻的两个第一多边形模块彼此固定连接,相邻的两个第一多边形模块的外围顶点通过第一连接条固定连接。
2.根据权利要求1所述的模块化多自由度运动平台,其特征在于:所述驱动机构的数量为3-6个。
3.根据权利要求2所述的模块化多自由度运动平台,其特征在于:所述驱动机构的数量为6个,6个所述驱动机构与上平台的铰接点的编号为ai(i=1,2,……6),6个所述驱动机构与下平台的铰接点的编号为bi(i=1,2,……6);铰接点a1至铰接点a6依次连线构成一个六边形,该六边形的内角均为120度;铰接点b1至铰接点b6依次连线构成一个六边形,该六边形的内角均为120度。
4.根据权利要求2所述的模块化多自由度运动平台,其特征在于:所述驱动机构为直线电机或者气缸或者液压缸。
5.根据权利要求1所述的模块化多自由度运动平台,其特征在于:所述第一多边形模块为正多边形或者矩形。
6.根据权利要求5所述的模块化多自由度运动平台,其特征在于:所述第一多边形模块为正三角形、正方形、正五边形、正六边形、正七边形或者正八边形。
7.根据权利要求6所述的模块化多自由度运动平台,其特征在于:所述第一多边形模块为正六边形,所述上平台包括三组第一多边形模块,位于中间一组的第一多边形模块的数量比位于两侧一组的第一多边形模块的数量大1。
8.根据权利要求1-7中任一项所述的模块化多自由度运动平台,其特征在于:所述下平台包括多个第二多边形模块和多个第二连接条,多个所述第二多边形模块平铺设置,相邻的两个第二多边形模块彼此固定连接,相邻的两个第二多边形模块的外围顶点通过第二连接条固定连接。
9.根据权利要求8所述的模块化多自由度运动平台,其特征在于:所述第二多边形模块为正多边形或者矩形。
10.根据权利要求9所述的模块化多自由度运动平台,其特征在于:所述第二多边形模块为正六边形,所述下平台包括一个位于中心的第二多边形模块以及三个位于外围的第二多边形模块,三个位于外围的第二多边形模块彼此不相邻地连接于位于中心的第二多边形模块。
技术总结
本技术公开了一种模块化多自由度运动平台,属于运动仿真技术领域。模块化多自由度运动平台包括上平台、下平台、驱动机构和控制装置;上平台设置在下平台的上方,驱动机构的两端分别铰接于上平台和下平台,控制装置通信连接驱动机构;上平台包括多个第一多边形模块和多个第一连接条,多个第一多边形模块平铺设置,相邻的两个第一多边形模块彼此固定连接,相邻的两个第一多边形模块的外围顶点通过第一连接条固定连接。上平台由多个第一多边形模块和多个第一连接条拼装而成,第一多边形模块和第一连接条重量较轻,方便现场安装,可以保持较高的安装精度。
技术研发人员:李宁,肖伟,刘咏华,邱鑫,邵宏庆,唐晓洪,刘艳冰
受保护的技术使用者:无锡中惠天泽智能科技有限公司
技术研发日:20230224
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!