胸椎微小错位仿真正骨训练装置
本技术涉及医疗器械,尤其涉及一种胸椎微小错位仿真正骨训练装置。
背景技术:
1、脊柱是人体的中轴,脊柱内有脊髓,是神经系统中的低级中枢(脑神经是高级中枢),由脊髓发出的周围神经,支配全身肢体的运动功能和感觉;由脊髓发出的植物神经(交感神经和副交感神经)支配内脏器官的功能和全身血管的舒缩;心脏输送给脑的血液,需经颈部上行,其中两条椎动脉和静脉穿行于颈椎横突之间。
2、损伤退变性脊柱疾病是指颈、胸、腰椎、骨盆的骨关节、椎间盘及椎周软组织遭受损伤或退行性改变,发生脊椎错位、间盘突出、韧带钙化或骨质增生,直接或间接地对神经根、椎动脉、脊髓或和交感神经等产生刺激或压迫而引起的多种临床综合征。损伤退变性脊柱疾病不只是导致颈肩腰腿痛,而且又是许多病症的病因之一。
3、整脊正骨是治疗损伤退变性脊柱疾病的有效方法之一,然而整脊正骨作为堪比骨折治疗的医疗手段,缺乏标准的训练方法和训练装置,脊柱结构中胸椎有别于腰椎和颈椎,颈椎和腰椎更为灵活,胸椎由于其与前方的肋骨形成桶状结构使其更加稳定,胸椎的正骨复位方式和方法也明显有别于颈椎和腰椎,整脊治疗效果主要依赖于医生个人的经验和手法,导致医生的整脊正骨技术水平参差不齐,制约着中医正骨手法的应用普及和传承创新。
技术实现思路
1、本实用新型提供一种胸椎微小错位仿真正骨训练装置,用以解决现有技术整脊正骨缺乏标准的训练方法,导致医生的整脊正骨技术水平参差不齐的问题。
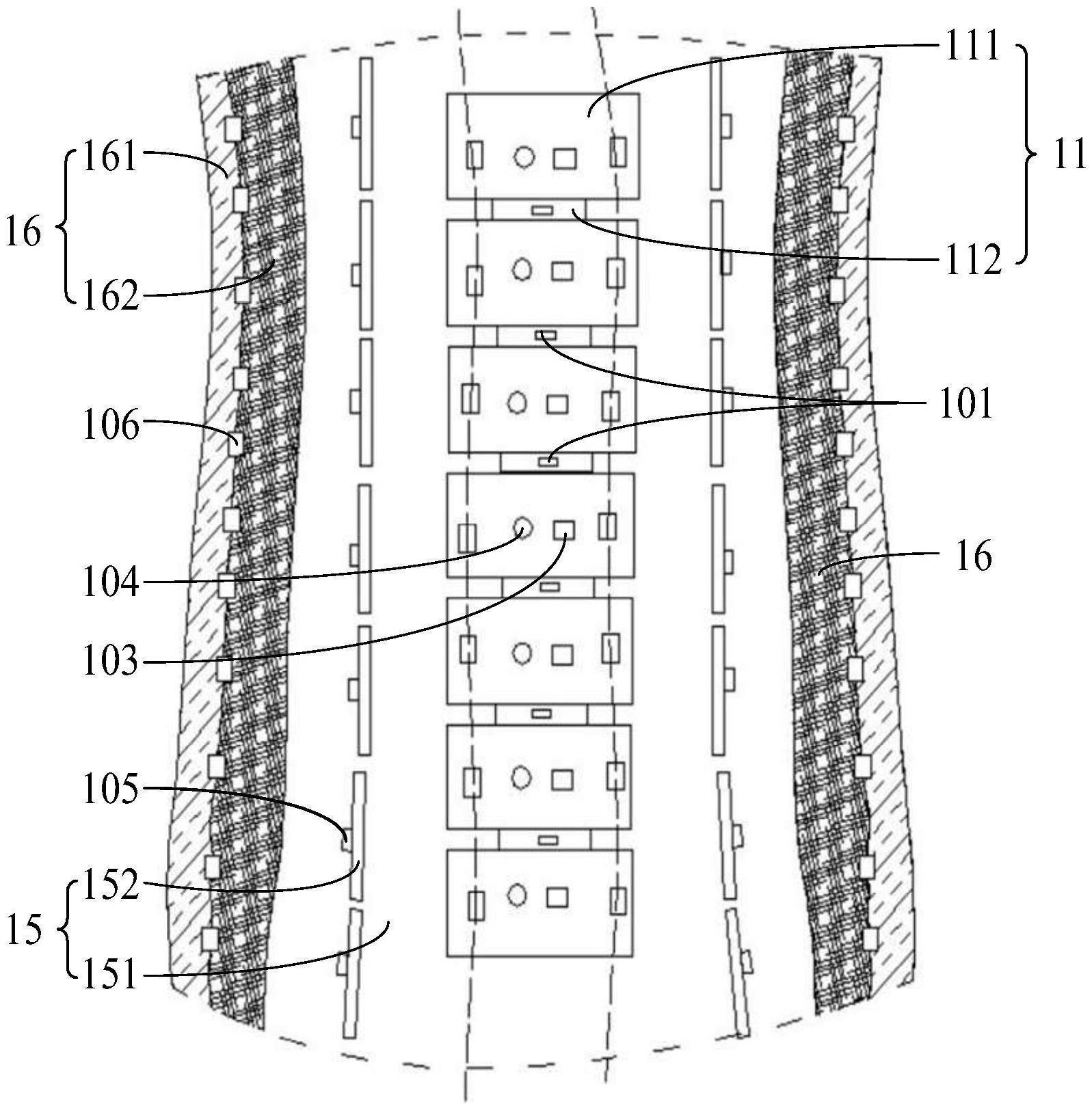
2、本实用新型提供一种胸椎微小错位仿真正骨训练装置,包括:仿真胸椎、仿真肋骨和仿真胸骨,所述仿真胸椎包括多个依次连接的胸椎锥节,每个所述胸椎锥节通过成对设置的所述仿真肋骨与所述仿真胸骨连接,以使得所述仿真胸椎、所述仿真肋骨和所述仿真胸骨形成桶状结构;
3、仿真肌肉,所述仿真胸椎包覆于所述仿真肌肉中;
4、第一压力传感器,相邻两个所述胸椎锥节之间均设有所述第一压力传感器,用于检测并记录所述胸椎锥节间的压力变化;
5、应力片,所述应力片设于所述仿真胸骨,用于检测所述仿真胸骨的形变信息;
6、位移传感器和陀螺仪,每个所述胸椎锥节上均设有所述位移传感器和所述陀螺仪,用于检测并记录所述胸椎锥节的位移和角度变化;
7、拉力传感器,设置在所述仿真肌肉中,用于检测并记录所述仿真肌肉中的拉力的变化;
8、控制模块和人机交互模块,所述第一压力传感器、所述应力片、所述位移传感器、所述陀螺仪和所述拉力传感器分别与所述控制模块连接,所述控制模块与所述人机交互模块连接。
9、根据本实用新型提供的一种胸椎微小错位仿真正骨训练装置,所述仿真胸椎还包括弹性囊体;
10、所述弹性囊体设有多个,每个所述弹性囊体设于相邻的两个所述胸椎锥节之间,所述第一压力传感器设于所述弹性囊体内;
11、其中,所述第一压力传感器用于检测所述弹性囊体内的气压,从而获取相邻两个所述胸椎锥节之间的压力变化信息。
12、根据本实用新型提供的一种胸椎微小错位仿真正骨训练装置,每个所述弹性囊体均设有进气口和排气口,每个所述弹性囊体的所述进气口均通过调压阀与供气装置连通;
13、其中,所述控制模块分别与所述调压阀和所述供气装置连接。
14、根据本实用新型提供的一种胸椎微小错位仿真正骨训练装置,每个所述胸椎锥节中均设置有磁性件,相邻的两个所述胸椎锥节内的所述磁性件的相对端部的磁极相同。
15、根据本实用新型提供的一种胸椎微小错位仿真正骨训练装置,所述胸椎锥节设有十二节;所述仿真肋骨设有二十四根,二十四根所述仿真肋骨均分为十二对;
16、其中,成对设置的两个所述仿真肋骨的一端连接于每个所述胸椎锥节的相对侧,另一端连接于所述仿真胸骨的相对侧。
17、根据本实用新型提供的一种胸椎微小错位仿真正骨训练装置,所述仿真肌肉包括:
18、弹性体,每个所述胸椎锥节均埋植在所述弹性体中;
19、拉伸件,所述拉伸件穿设在所述弹性体中,所述拉伸件与所述拉力传感器连接,所述拉伸件用于为所述弹性体提供并调整拉力。
20、根据本实用新型提供的一种胸椎微小错位仿真正骨训练装置,还包括:
21、仿真皮肤,所述仿真皮肤包覆在所述仿真肌肉外;
22、柔性传感器,设置在所述仿真皮肤中,并与所述控制模块的输入端电连接,用于检测并记录所述仿真皮肤上的压力变化。
23、根据本实用新型提供的一种胸椎微小错位仿真正骨训练装置,所述仿真皮肤包括:仿真皮肤层和仿真脂肪层;
24、所述仿真脂肪层包覆在所述仿真肌肉外,所述仿真皮肤层包覆于所述仿真脂肪层背离所述仿真肌肉的一侧;所述柔性传感器设置在所述仿真皮肤层和所述仿真脂肪层之间。
25、根据本实用新型提供的一种胸椎微小错位仿真正骨训练装置,所述陀螺仪为三轴陀螺仪、六轴陀螺仪或九轴陀螺仪。
26、本实用新型的胸椎微小错位仿真正骨训练装置,通过对训练装置设置仿真胸椎、仿真肋骨、仿真胸骨和仿真肌肉,可以对真实人体的胸椎结构及胸椎附近的肌肉结构进行模拟,有利于模拟人体胸椎结构在各个姿态下的实际情况,提升模拟效果;与此同时,通过设置第一压力传感器、位移传感器、陀螺仪、应力片和拉力传感器,可以对各个胸椎锥节所对应的位姿变化和受力情况进行检测记录,并将相应参数输入控制模块,再由人机交互模块进行可视化展示,方便对整脊正骨过程和效果进行观察分析与记录,既可以对标准的整脊正骨手法的相关参数进行采集仿真,从而形成标准的训练参数,建立相应数据库,并用于对受训者进行参照训练,有效解决了现有技术整脊正骨缺乏标准的训练方法,导致医生的整脊正骨技术水平参差不齐的问题。
技术特征:
1.一种胸椎微小错位仿真正骨训练装置,其特征在于,包括:
2.根据权利要求1所述的胸椎微小错位仿真正骨训练装置,其特征在于,所述仿真胸椎还包括弹性囊体;
3.根据权利要求2所述的胸椎微小错位仿真正骨训练装置,其特征在于,每个所述弹性囊体均设有进气口和排气口,每个所述弹性囊体的所述进气口均通过调压阀与供气装置连通;
4.根据权利要求1所述的胸椎微小错位仿真正骨训练装置,其特征在于,每个所述胸椎锥节中均设置有磁性件,相邻的两个所述胸椎锥节内的所述磁性件的相对端部的磁极相同。
5.根据权利要求1所述的胸椎微小错位仿真正骨训练装置,其特征在于,所述胸椎锥节设有十二节;所述仿真肋骨设有二十四根,二十四根所述仿真肋骨均分为十二对;
6.根据权利要求1至5任一项所述的胸椎微小错位仿真正骨训练装置,其特征在于,所述仿真肌肉包括:
7.根据权利要求1至5任一项所述的胸椎微小错位仿真正骨训练装置,其特征在于,还包括:
8.根据权利要求7所述的胸椎微小错位仿真正骨训练装置,其特征在于,所述仿真皮肤包括:仿真皮肤层和仿真脂肪层;
9.根据权利要求1至5任一项所述的胸椎微小错位仿真正骨训练装置,其特征在于,所述陀螺仪为三轴陀螺仪、六轴陀螺仪或九轴陀螺仪。
技术总结
本技术涉及医疗器械技术领域,提供一种胸椎微小错位仿真正骨训练装置,包括仿真胸椎、仿真肋骨、仿真胸骨、仿真肌肉、第一压力传感器、应力片、位移传感器、陀螺仪、拉力传感器、控制模块和人机交互模块;仿真胸椎包括多个依次连接的胸椎锥节,每个胸椎锥节通过成对设置的仿真肋骨与仿真胸骨连接,以使得仿真胸椎、仿真肋骨和仿真胸骨形成桶状结构;仿真胸椎包覆于仿真肌肉中;应力片设于仿真胸骨,每个胸椎锥节上均设有位移传感器和陀螺仪,拉力传感器设置在仿真肌肉中;第一压力传感器、应力片、位移传感器、陀螺仪和拉力传感器分别与控制模块连接,控制模块与人机交互模块连接。
技术研发人员:马跃,关玲,刘鑫源,冯欢
受保护的技术使用者:中国人民解放军海军航空大学
技术研发日:20230324
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!