一种悬挂式悬浮转动机器人的制作方法
本技术属于物品灯光展示,具体涉及一种悬挂式悬浮转动机器人。
背景技术:
1、随着科技的发展,商业宣传成为了商业发展一种常见的技术手段,其中较常见的一种宣传手段就是对企业logo或固定文字等灯光展示物通过灯光展示的效果进行宣传,而现有的宣传方式多为通过led灯等照射在地面上进行简单的旋转,配合上展示物图片进行简单的旋转,这种展示效果已经没有什么新颖性,展示效果一般,已逐渐不能满足人们对灯光展示效果的要求,因此,需要研发出一种更好的灯光展示技术。
技术实现思路
1、本实用新型的目的是提供一种悬挂式悬浮转动机器人,用以解决现有技术中存在的上述问题。
2、为了实现上述目的,本实用新型采用以下技术方案:
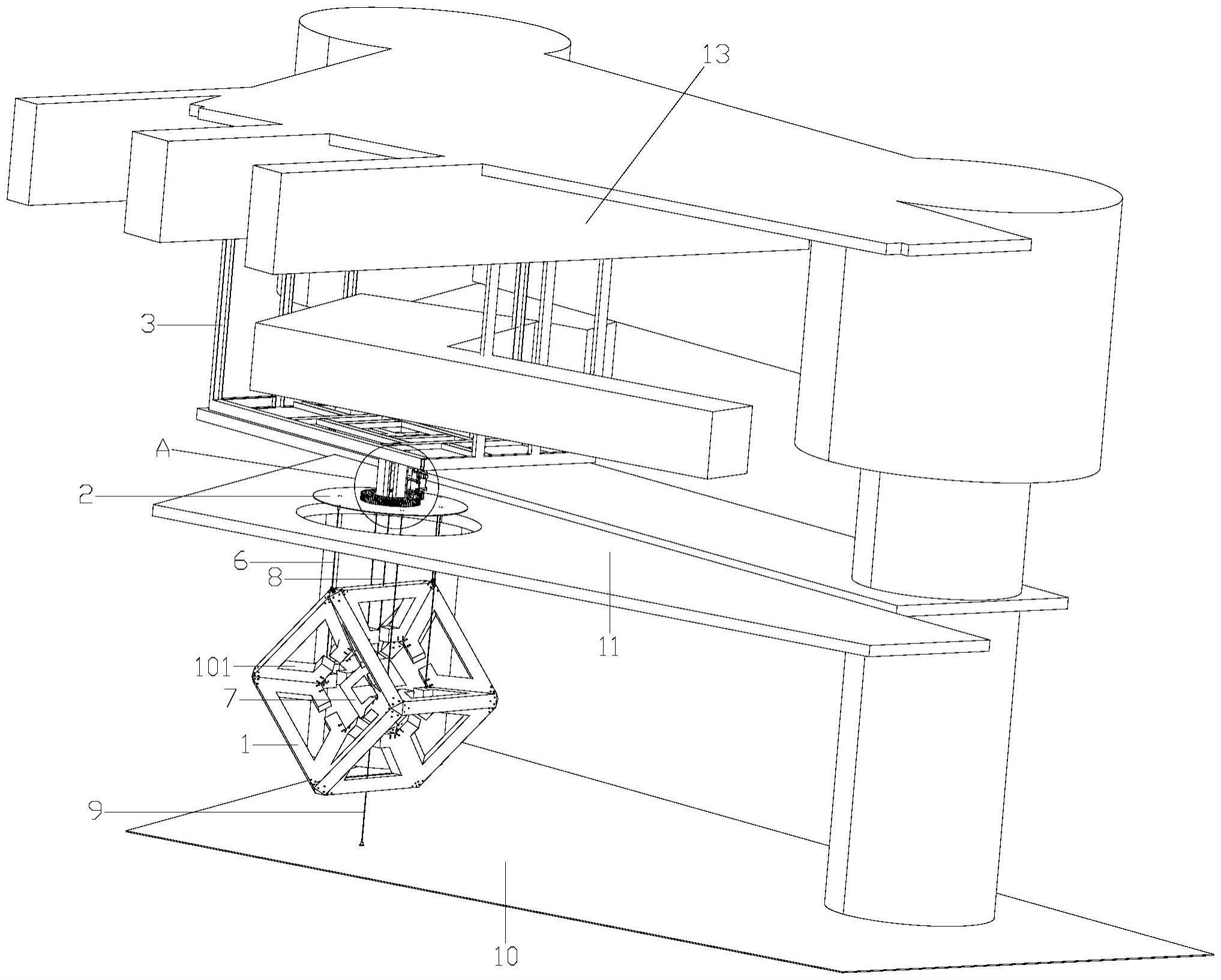
3、一种悬挂式悬浮转动机器人,包括从下网上依次设置的反光立方体框架、灯光安装盘和悬吊架,悬吊架的下端固定有连接杆,连接杆的下端与灯光安装盘转动连接,且连接杆与灯光安装盘之间设置有驱动灯光安装盘转动的驱动机构;所述灯光安装盘通过多个第一透明钢丝与反光立方体框架相连接,灯光安装盘的下端安装有多个照向反光立方体框架的灯光;所述反光立方体框架内设置有灯光展示物,灯光展示物的上端通过竖直设置的第二透明钢丝与灯光安装盘的中心轴相连接。
4、作为本实用新型中一种优选的技术方案,所述灯光展示物的下端通过第三透明钢丝与地面相连接。
5、作为本实用新型中一种优选的技术方案,所述反光立方体框架的下部设置有第一贯穿孔,第三透明钢丝贯穿第一贯穿孔且与第一贯穿孔间隙配合。
6、作为本实用新型中一种优选的技术方案,所述反光立方体框架的上部设置有第二贯穿孔,第二透明钢丝贯穿第二贯穿孔且与第二贯穿孔间隙配合。
7、作为本实用新型中一种优选的技术方案,所述灯光安装盘与反光立方体框架之间设置有挡板,挡板上设置有便于灯光安装盘上的灯光照射在反光立方体框架上的避让孔,第一透明钢丝与第二透明钢丝均贯穿避让孔。
8、作为本实用新型中一种优选的技术方案,所述连接杆的下端通过轴承与灯光安装盘转动连接。
9、作为本实用新型中一种优选的技术方案,所述驱动机构包括驱动电机、主动齿轮和被动齿轮,驱动电机安装于连接杆上,主动齿轮安装于驱动电机的电机轴上,被动齿轮同轴连接于灯光安装盘上,且被动齿轮与主动齿轮相啮合;所述轴承的内圈与连接杆相连接,轴承的外圈通过被动齿轮与灯光安装盘相连接。
10、作为本实用新型中一种优选的技术方案,所述灯光展示物设置于反光立方体框架的中心点,反光立方体框架的各个棱角处均连接有向灯光展示物方向延伸的反光延伸杆。
11、作为本实用新型中一种优选的技术方案,所述反光延伸杆包括一体成型的第一长方体柱体段和第二长方体柱体段,第一长方体柱体段和第二长方体柱体段之间的夹角大于90°,第一长方体柱体段远离第二长方体柱体段的一端与反光立方体框架的棱角处相连接。
12、作为本实用新型中一种优选的技术方案,所述反光立方体框架的各个棱角处均连接有三个反光延伸杆,三个反光延伸杆呈三角形均匀分布,三个反光延伸杆的第一长方体柱体段分别设置于一个三棱柱的三面,三棱柱与反光延伸杆均一体成型的设置于反光立方体框架上,三个反光延伸杆的第二长方体柱体段均向远离三棱柱的方向延伸。
13、有益效果:本实用新型在使用时,可以利用驱动机构驱动灯光安装盘旋转,进而带动反光立方体框架和灯光展示物进行同步旋转,实现转速的控制,灯光安装盘下端的灯光照射在反光立方体框架和灯光展示物上,其中,反光立方体框架可以产生反光效果,随着转动和灯光的变化等,可以形成不同的展示效果,结合反光立方体框架,造型立体感强,而且采用的是第一透明钢丝和第二透明钢丝,能够展现出一种产品悬浮的效果,提升体验感。
技术特征:
1.一种悬挂式悬浮转动机器人,其特征在于,包括从下网上依次设置的反光立方体框架(1)、灯光安装盘(2)和悬吊架(3),悬吊架(3)的下端固定有连接杆(4),连接杆(4)的下端与灯光安装盘(2)转动连接,且连接杆(4)与灯光安装盘(2)之间设置有驱动灯光安装盘(2)转动的驱动机构(5);所述灯光安装盘(2)通过多个第一透明钢丝(6)与反光立方体框架(1)相连接,灯光安装盘(2)的下端安装有多个照向反光立方体框架(1)的灯光;所述反光立方体框架(1)内设置有灯光展示物(7),灯光展示物(7)的上端通过竖直设置的第二透明钢丝(8)与灯光安装盘(2)的中心轴相连接。
2.根据权利要求1所述的一种悬挂式悬浮转动机器人,其特征在于,所述灯光展示物(7)的下端通过第三透明钢丝(9)与地面(10)相连接。
3.根据权利要求2所述的一种悬挂式悬浮转动机器人,其特征在于,所述反光立方体框架(1)的下部设置有第一贯穿孔,第三透明钢丝(9)贯穿第一贯穿孔且与第一贯穿孔间隙配合。
4.根据权利要求1-3中任一项所述的一种悬挂式悬浮转动机器人,其特征在于,所述反光立方体框架(1)的上部设置有第二贯穿孔,第二透明钢丝(8)贯穿第二贯穿孔且与第二贯穿孔间隙配合。
5.根据权利要求1所述的一种悬挂式悬浮转动机器人,其特征在于,所述灯光安装盘(2)与反光立方体框架(1)之间设置有挡板(11),挡板(11)上设置有便于灯光安装盘(2)上的灯光照射在反光立方体框架(1)上的避让孔,第一透明钢丝(6)与第二透明钢丝(8)均贯穿避让孔。
6.根据权利要求1所述的一种悬挂式悬浮转动机器人,其特征在于,所述连接杆(4)的下端通过轴承(12)与灯光安装盘(2)转动连接。
7.根据权利要求6所述的一种悬挂式悬浮转动机器人,其特征在于,所述驱动机构(5)包括驱动电机(501)、主动齿轮(502)和被动齿轮(503),驱动电机(501)安装于连接杆(4)上,主动齿轮(502)安装于驱动电机(501)的电机轴上,被动齿轮(503)同轴连接于灯光安装盘(2)上,且被动齿轮(503)与主动齿轮(502)相啮合;所述轴承(12)的内圈与连接杆(4)相连接,轴承(12)的外圈通过被动齿轮(503)与灯光安装盘(2)相连接。
8.根据权利要求1所述的一种悬挂式悬浮转动机器人,其特征在于,所述灯光展示物(7)设置于反光立方体框架(1)的中心点,反光立方体框架(1)的各个棱角处均连接有向灯光展示物(7)方向延伸的反光延伸杆(101)。
9.根据权利要求8所述的一种悬挂式悬浮转动机器人,其特征在于,所述反光延伸杆(101)包括一体成型的第一长方体柱体段和第二长方体柱体段,第一长方体柱体段和第二长方体柱体段之间的夹角大于90°,第一长方体柱体段远离第二长方体柱体段的一端与反光立方体框架(1)的棱角处相连接。
10.根据权利要求9所述的一种悬挂式悬浮转动机器人,其特征在于,所述反光立方体框架(1)的各个棱角处均连接有三个反光延伸杆(101),三个反光延伸杆(101)呈三角形均匀分布,三个反光延伸杆(101)的第一长方体柱体段分别设置于一个三棱柱的三面,三棱柱与反光延伸杆(101)均一体成型的设置于反光立方体框架(1)上,三个反光延伸杆(101)的第二长方体柱体段均向远离三棱柱的方向延伸。
技术总结
本技术公开了一种悬挂式悬浮转动机器人,包括从下网上依次设置的反光立方体框架、灯光安装盘和悬吊架,悬吊架的下端固定有连接杆,连接杆的下端与灯光安装盘转动连接,连接杆与灯光安装盘之间设置有驱动灯光安装盘转动的驱动机构;灯光安装盘通过多个第一透明钢丝与反光立方体框架相连接,灯光安装盘的下端安装有多个照向反光立方体框架的灯光;反光立方体框架内设置有灯光展示物,灯光展示物的上端通过竖直设置的第二透明钢丝与灯光安装盘的中心轴相连接。本技术可以形成不同的展示效果,造型立体感强,而且采用的是第一透明钢丝和第二透明钢丝,能够展现出一种产品悬浮的效果,提升体验感。
技术研发人员:申健,汤晨雨,李楷
受保护的技术使用者:珠海奕博智能装备有限公司
技术研发日:20230519
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!