一种积木式编程机器人的制作方法
本技术涉及机器人,具体涉及一种积木式编程机器人。
背景技术:
1、积木一直是儿童喜爱的一种玩具,积木可以帮助儿童锻炼思维能力和动手能力,近年来,随着科技的发展,积木也融合了科技的要素,不仅限于塑料组件的拼接,训练儿童思维能力和动手能力的同时,还可以学到一定的编程知识。中国实用新型公开号为cn215298637u公开了一种积木式编程机器人,通过设置无线充电接收端使得编程机器人可以实现再次编程;
2、但是以上实用新型仍存在以下问题,使用履带式的机器人行动不方便,当遇到较高或较低的障碍时无法避障和收纳,遇到台阶时也无法爬阶,还无法快速移动。
3、基于此,本实用新型设计了一种积木式编程机器人以解决上述问题。
技术实现思路
1、针对现有技术所存在的上述缺点,本实用新型提供了一种积木式编程机器人。
2、为实现以上目的,本实用新型通过以下技术方案予以实现:
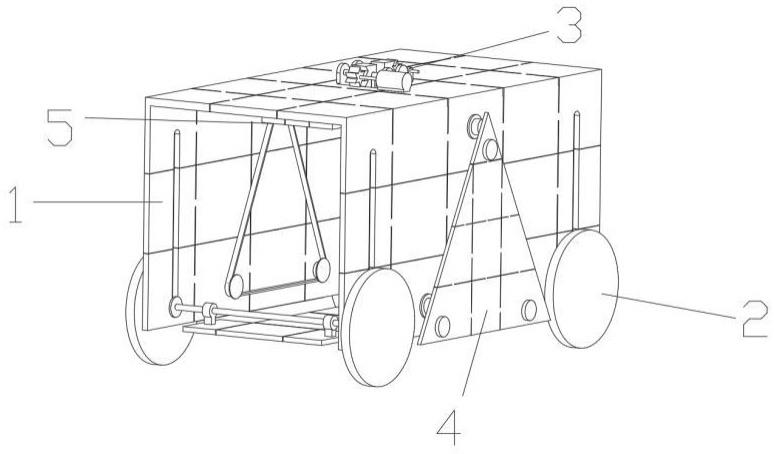
3、一种积木式编程机器人,包括插接式车厢,所述插接式车厢采用积木式插接有用于控制和编程机器人的控制组件;所述插接式车厢内有用于驱动机器人行动的驱动组件;所述驱动组件采用积木式插接有用于抬升或下降驱动组件的抬升组件;插接式车厢上还采用积木式插接有用于爬阶梯的爬楼组件;
4、所述抬升组件包括抬升驱动组件和抬升引导组件;插接式车厢和驱动组件均与抬升驱动组件采用积木式插接,控制组件与抬升驱动组件电接,抬升引导组件与驱动组件采用积木模块插接,抬升驱动组件与抬升引导组件转动连接。
5、更进一步的,所述控制组件包括控制模块、蓄电池、无线模块、传感器模块和输入模块;控制模块、蓄电池、无线模块、传感器模块和输入模块均采用积木模块插接在插接式车厢内壁顶端,控制模块、蓄电池、无线模块、传感器模块和输入模块互相电接。
6、更进一步的,所述驱动组件包括第一马达、第一锥形齿轮、第二锥形齿轮、两根第一连接杆、四组转动支撑座、四个车轮和支撑板;第一马达采用积木模块插接在支撑板上端右侧,第一马达的输出端采用积木模块固定插接在第一锥形齿轮中部,第一锥形齿轮与第二锥形齿轮啮合,第二锥形齿轮中部采用积木模块固定插接有一组第一连接杆,每一根第一连接杆的前后两端分别采用积木模块固定插接有一个车轮,两组第一连接杆均在前后两端套接有一组转动支撑座,四组转动支撑座均采用积木模块插接在支撑板上端,另一组第一连接杆位于支撑板左端,蓄电池与第一马达电接。
7、更进一步的,所述抬升引导组件包括四组连接杆滑槽、直槽、四组支撑架、两组导杆和八组限位环;每组第一连接杆的一端套接有两组限位环,两组限位环分别位于插接式车厢侧壁的前后两端,插接式车厢搭建时插接式车厢前后两端的侧壁在左右两侧均预留连接杆滑槽,第一连接杆穿过连接杆滑槽,直槽开设在插接式车厢顶端,四组支撑架分两组采用积木式插接在直槽前后两端,且前后两端的支撑架一一对应齐平,两组导杆分别采用积木模块插接在左右两端的两组支撑架上,两组导杆与抬升驱动组件连接。
8、更进一步的,直槽的形状为矩形。
9、更进一步的,直槽开设在插接式车厢顶端中部。
10、更进一步的,所述抬升驱动组件包括第二马达、主齿轮、主齿条、副齿轮、两组轴承支撑座、副齿条和第三连接杆;第二马达与蓄电池电接,第二马达采用积木模块插接在插接式车厢顶端且位于直槽前端右侧,第二马达的输出端采用积木式插接在主齿轮中部,主齿轮与主齿条啮合,主齿条和副齿条通过直槽穿过插接式车厢顶板,主齿条和副齿条的底部采用积木式插接在支撑板上,副齿条与副齿轮啮合,副齿轮通过第三连接杆转动插接在两组轴承支撑座上,两组轴承支撑座采用积木式插接在插接式车厢顶部且位于直槽右端,两组导杆分别穿过主齿条和副齿条中部开设的滑轨与两组齿条滑动连接。
11、更进一步的,所述爬楼组件包括第三马达、插接杆、两组皮带轮、六组z形转动杆、第二连接杆和两组三角爬架;插接式车厢前后内壁采用积木式均转动连接有三组z形转动杆,同一侧的z形转动杆通过皮带轮连接,且插接式车厢内壁采用积木式插接有插接杆,插接杆插接有第三马达,第三马达与蓄电池电接,且第三马达的输出端与下端一组z形转动杆插接,前后两端的三组z形转动杆呈三角形,第二连接杆的两端与上端的两组z形转动杆积木式插接,前后两端的三组z形转动杆的另一端均穿过插接式车厢侧壁分别与两组三角爬架采用积木模块固定插接。
12、有益效果
13、本实用新型通过当遇到比机器人底部略高的障碍物时,传感器模块采集到信息,并传达给控制模块,控制模块控制第二马达启动,带动主齿轮转动,带动与主齿轮啮合的主齿条向上移动,从而带动支撑板向上移动,防止障碍物划伤支撑板;当支撑板不断向上移动至车轮底端高于插接式车厢的底端时,车轮被收纳上去,为爬楼组件让位;当需要快速移动时,第二马达启动带动主齿轮转动,带动与主齿轮啮合的主齿条向下移动,从而带动支撑板向下移动,车轮的底端低于爬楼组件和插接式车厢的底端,启动第一马达,驱动车轮转动,机器人快速移动,限位环帮助在移动过程中车轮不会移位。
14、本实用新型通过当遇到阶梯时,传感器模块采集到信息,传输给控制模块,控制模块控制抬升组件将车轮收纳上去,控制模块控制蓄电池给第三马达供电,第三马达启动,第三马达带动插接杆转动,插接杆通过前端的皮带轮带动前端的三组z形转动杆转动,上端的第二连接杆带动后端的z形转动杆转动,从而带动后端的皮带轮和另外两组z形转动杆转动,六组z形转动杆同时同方向转动从而带动两组三角爬架上下阶梯。
技术特征:
1.一种积木式编程机器人,包括插接式车厢(1),其特征在于:
2.根据权利要求1所述的积木式编程机器人,其特征在于,所述控制组件(5)包括控制模块(51)、蓄电池(52)、无线模块(53)、传感器模块(54)和输入模块(55);控制模块(51)、蓄电池(52)、无线模块(53)、传感器模块(54)和输入模块(55)均采用积木模块插接在插接式车厢(1)内壁顶端,控制模块(51)、蓄电池(52)、无线模块(53)、传感器模块(54)和输入模块(55)互相电接。
3.根据权利要求2所述的积木式编程机器人,其特征在于,所述驱动组件(2)包括第一马达(21)、第一锥形齿轮(22)、第二锥形齿轮(23)、两根第一连接杆(24)、四组转动支撑座(25)、四个车轮(26)和支撑板(27);第一马达(21)采用积木模块插接在支撑板(27)上端右侧,第一马达(21)的输出端采用积木模块固定插接在第一锥形齿轮(22)中部,第一锥形齿轮(22)与第二锥形齿轮(23)啮合,第二锥形齿轮(23)中部采用积木模块固定插接有一组第一连接杆(24),每一根第一连接杆(24)的前后两端分别采用积木模块固定插接有一个车轮(26),两组第一连接杆(24)均在前后两端套接有一组转动支撑座(25),四组转动支撑座(25)均采用积木模块插接在支撑板(27)上端,另一组第一连接杆(24)位于支撑板(27)左端,蓄电池(52)与第一马达(21)电接。
4.根据权利要求3所述的积木式编程机器人,其特征在于,所述抬升引导组件(32)包括四组连接杆滑槽(321)、直槽(322)、四组支撑架(323)、两组导杆(324)和八组限位环(325);每组第一连接杆(24)的一端套接有两组限位环(325),两组限位环(325)分别位于插接式车厢(1)侧壁的前后两端,插接式车厢(1)搭建时插接式车厢(1)前后两端的侧壁在左右两侧均预留连接杆滑槽(321),第一连接杆(24)穿过连接杆滑槽(321),直槽(322)开设在插接式车厢(1)顶端,四组支撑架(323)分两组采用积木式插接在直槽(322)前后两端,且前后两端的支撑架(323)一一对应齐平,两组导杆(324)分别采用积木模块插接在左右两端的两组支撑架(323)上,两组导杆(324)与抬升驱动组件(31)连接。
5.根据权利要求4所述的积木式编程机器人,其特征在于,直槽(322)的形状为矩形。
6.根据权利要求5所述的积木式编程机器人,其特征在于,直槽(322)开设在插接式车厢(1)顶端中部。
7.根据权利要求6所述的积木式编程机器人,其特征在于,所述抬升驱动组件(31)包括第二马达(311)、主齿轮(312)、主齿条(313)、副齿轮(314)、两组轴承支撑座(315)、副齿条(316)和第三连接杆(317);第二马达(311)与蓄电池(52)电接,第二马达(311)采用积木模块插接在插接式车厢(1)顶端且位于直槽(322)前端右侧,第二马达(311)的输出端采用积木式插接在主齿轮(312)中部,主齿轮(312)与主齿条(313)啮合,主齿条(313)和副齿条(316)通过直槽(322)穿过插接式车厢(1)顶板,主齿条(313)和副齿条(316)的底部采用积木式插接在支撑板(27)上,副齿条(316)与副齿轮(314)啮合,副齿轮(314)通过第三连接杆(317)转动插接在两组轴承支撑座(315)上,两组轴承支撑座(315)采用积木式插接在插接式车厢(1)顶部且位于直槽(322)右端,两组导杆(324)分别穿过主齿条(313)和副齿条(316)中部开设的滑轨与两组齿条滑动连接。
8.根据权利要求7所述的积木式编程机器人,其特征在于,所述爬楼组件(4)包括第三马达(41)、插接杆(42)、两组皮带轮(43)、六组z形转动杆(44)、第二连接杆(45)和两组三角爬架(46);插接式车厢(1)前后内壁采用积木式均转动连接有三组z形转动杆(44),同一侧的z形转动杆(44)通过皮带轮(43)连接,且插接式车厢(1)内壁采用积木式插接有插接杆(42),插接杆(42)插接有第三马达(41),第三马达(41)与蓄电池(52)电接,且第三马达(41)的输出端与下端一组z形转动杆(44)插接,前后两端的三组z形转动杆(44)呈三角形,第二连接杆(45)的两端与上端的两组z形转动杆(44)积木式插接,前后两端的三组z形转动杆(44)的另一端均穿过插接式车厢(1)侧壁分别与两组三角爬架(46)采用积木模块固定插接。
技术总结
本技术公开了一种积木式编程机器人,属于机器人技术领域,包括插接式车厢,所述插接式车厢采用积木式插接有用于控制和编程机器人的控制组件;所述插接式车厢内有用于驱动机器人行动的驱动组件;所述驱动组件采用积木式插接有用于升降驱动组件的抬升组件;插接式车厢上还采用积木式插接有用于爬阶梯的爬楼组件。通过上述方式,抬升驱动组件通过抬升引导组件与驱动组件采用积木式插接,抬升引导组件协助驱动组件更稳定的上下移动;当遇到比机器人底部略高的障碍物时,传感器模块采集到信息并传给控制模块,控制模块控制抬升驱动组件将驱动组件上升,跨过障碍物;当抬升驱动组件驱动驱动组件上移可以将车轮收纳,并为爬楼组件让位。
技术研发人员:鲁军
受保护的技术使用者:山西伊泰人工智能科技有限公司
技术研发日:20230529
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!