多模式机器人生产线教学实训平台的制作方法
本技术涉及实训教学平台,特别涉及一种多模式机器人生产线教学实训平台。
背景技术:
0、技术背景
1、随着工业自动化的飞速发展,机器人在各行各业得以应用,为响应智能化发展的需求,需要培养大量的技术人才。在机器人教学过程中,机器人教学实训平台成为必不可少的教学工具。而现有的机器人教学平台大多只适用于单一模式机器人的教学,无法同时满足多模式机器人生产线的教学任务,若要满足多模式机器人生产线的教学任务,则需要制定不同的实训平台,教学成本较高。
2、现有技术的缺点是:现有的机器人实训平台无法满足多模式机器人生产线的教学任务。
技术实现思路
1、本实用新型提供了一种多模式机器人生产线教学实训平台,能够适用于多模式机器人生产线的组装及教学任务。
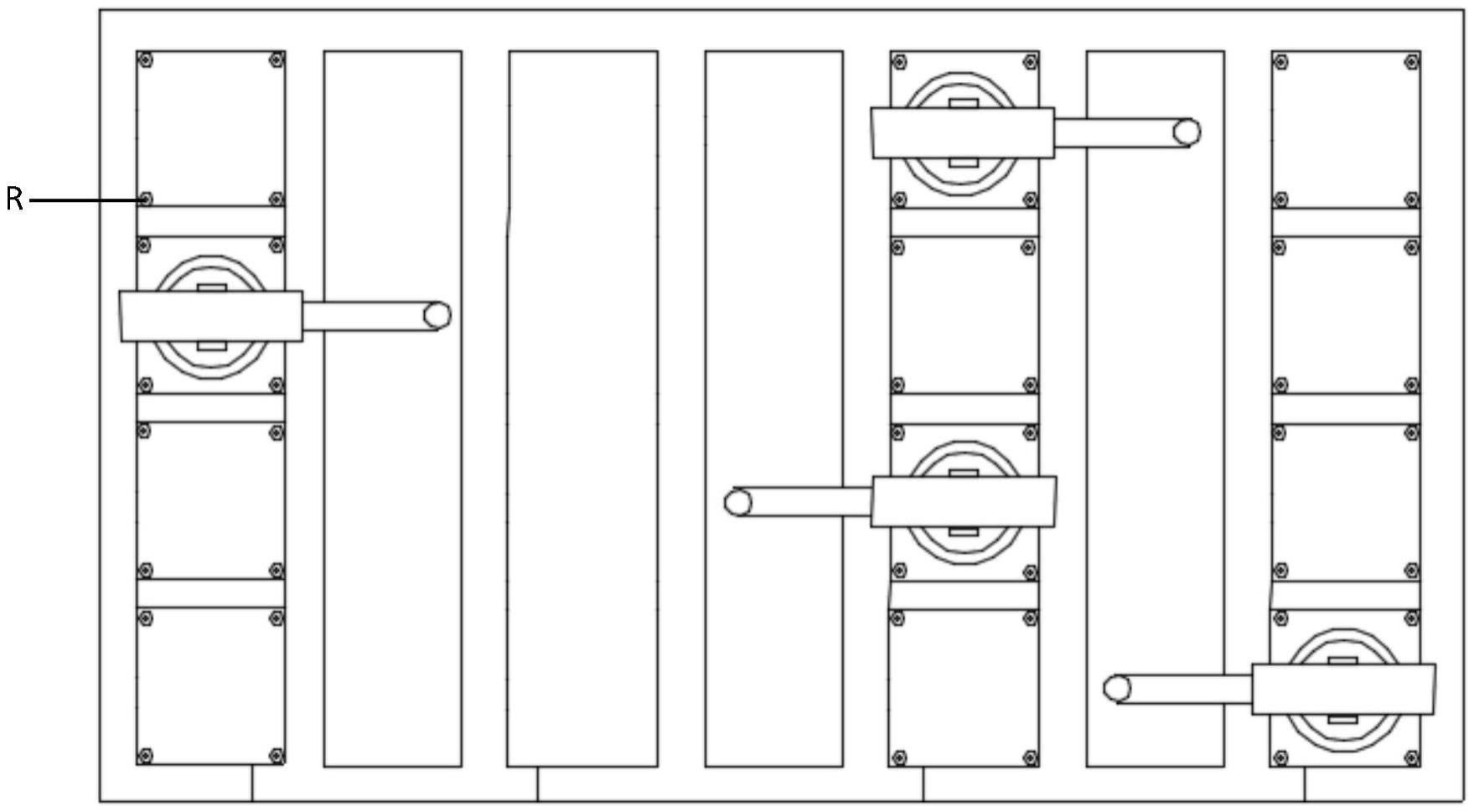
2、为达到上述目的,本实用新型提供的一种多模式机器人生产线教学实训平台,包括工作台,该工作台的上表面设置有传送带,其关键是:所述传送带旁布置有n个机器人基座,n个机器人基座中,至少有二个机器人基座上固定有机器人,所述机器人基座设置有用于固定机器人中柱的螺栓安装孔,机器人基座还设置有电源插座和数据线插座组合;所述工作台侧壁设置有机器人接线区,该机器人接线区设置n个机器人插座组;
3、每个所述机器人基座都标记有唯一的位置坐标,且与机器人插座组的位置坐标一一对应;所述电源插座和数据线插座组合通过工作台内部接线与对应位置坐标的机器人插座组连接。
4、所述机器人基座可用于安装多模式机器人,通过螺栓安装孔固定,便于机器人的安装与拆卸,在实训教学过程中可根据教学内容任意更换机器人类型;所述传送带用于摆放和传送工件,供机器人操作使用;所述接线区阵列用于线路连接,每个机器人基座都配置有与其位置坐标对应的机器人插座组。工作台内部接线设置在机器人基座旁,该内部接线的布局设计使得整个线路连接更加简便,工作台面也更加整洁有序,并且避免了因凌乱的线路连接导致机器人工作时不小心误伤电路,引发安全事故的问题。
5、作为优选:所述机器人插座组上设置有电源线插孔和数据线插孔组。
6、所述电源线插孔通过工作台内部接线与对应位置坐标的电源插座连接,所述数据线插孔通过工作台内部接线与对应位置坐标的数据线插座组合连接。
7、作为优选:所述机器人接线区还与控制器连接。
8、机器人基座上的机器人完成安装及线路连接后,即可通过控制器控制机器人正常工作。
9、作为优选:机器人基座上的机器人或者是焊接机器人;或者是涂装机器人;或者是装配机器人;或者是包装机器人;或者是码垛机器人;
10、所述传送带上布置有行走机器人。
11、通过上述设计,本实用新型提供的教学实训平台可满足多模式机器人生产线的教学任务,且结构简单,操作方便。
12、作为优选:所述机器人基座为凹形沉槽,其槽壁开有阶梯形支撑台,所述螺栓安装孔竖向布置在该阶梯形支撑台上;
13、所述电源插座和数据线插座组合布置在凹形沉槽的槽底。
14、作为优选:当机器人基座上未安装机器人时,所述凹形沉槽配装有盖板,该盖板经所述螺栓安装孔内的螺栓固定;
15、所述盖板的上表面与工作台的上表面齐平。
16、此时,该机器人基座上可安装传送带,用于摆放、传送所需工件,供其他机器人基座上安装的机器人工作使用。
17、通过上述设计,当机器人基座上未安装机器人时,该工作区也不会被闲置,并且能够满足更多种类的机器人工作时对工件传送区域的要求,提高了机器人基座区域的利用率,缩小了实训平台的占地面积,使得整个实训平台具有更强的实用性。
18、作为优选:所述数据线插座组合含有航空插座、usb插座、485插座、232插座、can插座、vga插座、lvds插座,该数据线插座组合的设计,可以满足多种控制指令和控制线路的需求,具体操作时,可根据所安装机器人的工作需求连接相应的数据线插座。
19、作为优选:n个机器人基座在工作台的上表面呈矩阵排布,所述机器人基座和机器人插座组的经纬向布置一一对应。
20、本实用新型的显著效果是:能够满足不同种类机器人的安装及教学任务,满足多种控制指令和控制线路的需求,装拆简单方便,建设成本较低。
技术特征:
1.一种多模式机器人生产线教学实训平台,包括工作台,该工作台的上表面设置有传送带,其特征在于:所述传送带旁布置有n个机器人基座,n个机器人基座中,至少有二个机器人基座上固定有机器人,所述机器人基座设置有用于固定机器人中柱的螺栓安装孔(r),机器人基座还设置有电源插座(2)和数据线插座组合(3);所述工作台侧壁设置有机器人接线区,该机器人接线区设置n个机器人插座组;
2.根据权利要求1所述的多模式机器人生产线教学实训平台,其特征在于:所述机器人插座组上设置有电源线插孔和数据线插孔组。
3.根据权利要求1所述的多模式机器人生产线教学实训平台,其特征在于:所述机器人接线区还与控制器连接。
4.根据权利要求1所述的多模式机器人生产线教学实训平台,其特征在于:机器人基座上的机器人或者是焊接机器人;或者是涂装机器人;或者是装配机器人;或者是包装机器人;或者是码垛机器人;
5.根据权利要求1所述的多模式机器人生产线教学实训平台,其特征在于:所述机器人基座为凹形沉槽(1),其槽壁开有阶梯形支撑台(1a),所述螺栓安装孔(r)竖向布置在该阶梯形支撑台(1a)上;
6.根据权利要求5所述的多模式机器人生产线教学实训平台,其特征在于:当机器人基座上未安装机器人时,所述凹形沉槽(1)配装有盖板,该盖板经所述螺栓安装孔(r)内的螺栓固定;
7.根据权利要求1所述的多模式机器人生产线教学实训平台,其特征在于:所述数据线插座组合(3)含有航空插座、usb插座、485插座、232插座、can插座、vga插座、lvds插座。
8.根据权利要求1所述的多模式机器人生产线教学实训平台,其特征在于:n个机器人基座在工作台的上表面呈矩阵排布,所述机器人基座和机器人插座组的经纬向布置一一对应。
技术总结
本技术提供的一种多模式机器人生产线教学实训平台,包括工作台,该工作台的上表面设置有传送带,其特征在于:所述传送带旁布置有N个机器人基座,N个机器人基座中,至少有二个机器人基座上固定有机器人,所述机器人基座设置有用于固定机器人中柱的螺栓安装孔,机器人基座还设置有电源插座和数据线插座组合;所述工作台侧壁设置有机器人接线区,该机器人接线区设置N个机器人插座组;每个所述机器人基座都标记有唯一的位置坐标,且与机器人插座组的位置坐标一一对应;所述电源插座和数据线插座组合通过工作台内部接线与对应位置坐标的机器人插座组连接。其显著效果是:能够满足不同种类机器人的安装及教学任务,装拆简单方便,建设成本较低。
技术研发人员:张凯,梁兴建,杨铃,肖晗,张程严,张立超,方瑜,李禄升,王力,陈琳,张敏,张莹
受保护的技术使用者:重庆市渝北职业教育中心
技术研发日:20230621
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!