一种基础模块位置调节机构的制作方法
本技术涉及工业机器人实训平台的,具体涉及一种基础模块位置调节机构。
背景技术:
1、工业机器人实训平台是一种用于培训和教育工业机器人技能的虚拟或实际环境。它提供了一个结合了硬件和软件的学习平台,可以模拟真实的工业机器人操作和编程任务。利用工业机器人实训平台可以连接到真实的工业机器人,使操作者可以在安全环境下实际操作机器人,学习工业机器人的各项功能和特性并提高操作者的熟练度,而现有的部分实训平台在使用时只能够进行固定程序的操作,比如将待转运物料从某处搬运至另一处,而当需要改变搬运的距离以及位置时,就需要更换另外一种类型的实训平台,极大程度提高了实训的成本。
技术实现思路
1、本实用新型的目的在于:为解决上述问题,本实用新型提供了一种基础模块位置调节机构。
2、本实用新型为了实现上述目的具体采用以下技术方案:
3、包括基台,所述基台的上端设置有多自由度机械臂,所述多自由度机械臂的自由端设置有竖直向下的抓取部,所述抓取部用于抓取物料;
4、所述基台的上端设置有至少两组并列设置的弧形板,所述弧形板的表面可拆卸的连接有多个物料放置模块。
5、作为上述技术方案的进一步描述,所述弧形板与所述物料放置模块通过多个螺栓进行固定。
6、作为上述技术方案的进一步描述,所述弧形板设置有两组,所述多自由度机械臂处于所述弧形板所对应的圆心处。
7、作为上述技术方案的进一步描述,所述基台的上表面分布有多个螺孔,所述螺孔与所述螺栓配合实现对所述物料放置模块的固定。
8、作为上述技术方案的进一步描述,所述物料放置模块的上表面设置有多个凹槽,所述凹槽内放置有多种形状的所述物料。
9、作为上述技术方案的进一步描述,所述物料的形状包括圆柱形,圆锥形,三角形以及方形。
10、作为上述技术方案的进一步描述,两组所述弧形板的尺寸与形状相同,且所述物料放置模块放置在所述弧形板上的位置相同。
11、作为上述技术方案的进一步描述,两组所述弧形板中的弧形板一的尺寸大于弧形板二的尺寸,所述物料放置模块在所述弧形板一上所处的位置与所述物料放置模块在所述弧形板二上所处的位置存在不同。
12、作为上述技术方案的进一步描述,所述物料放置模块的形状为方形结构。
13、作为上述技术方案的进一步描述,所述物料放置模块包括上底板与下底板,所述上底板与所述下底板之间通过多个支撑杆相连接。
14、本实用新型的有益效果如下:
15、1、本实用新型,通过在物料放置模块上可放置多种类型的物料,并且物料放置模块可根据实际的需要放置弧形板上的不同位置,从而使学员控制工业机器人进行不同操作模式,操作模式更加的丰富多样,更符合于实际生产的过程中,并且相较于现有技术无需更换新的实训平台,可减少成本的投入。
16、为更清楚地阐述本实用新型的结构特征和作用,下面结合附图与具体实施例来对本实用新型进行详细说明。
技术特征:
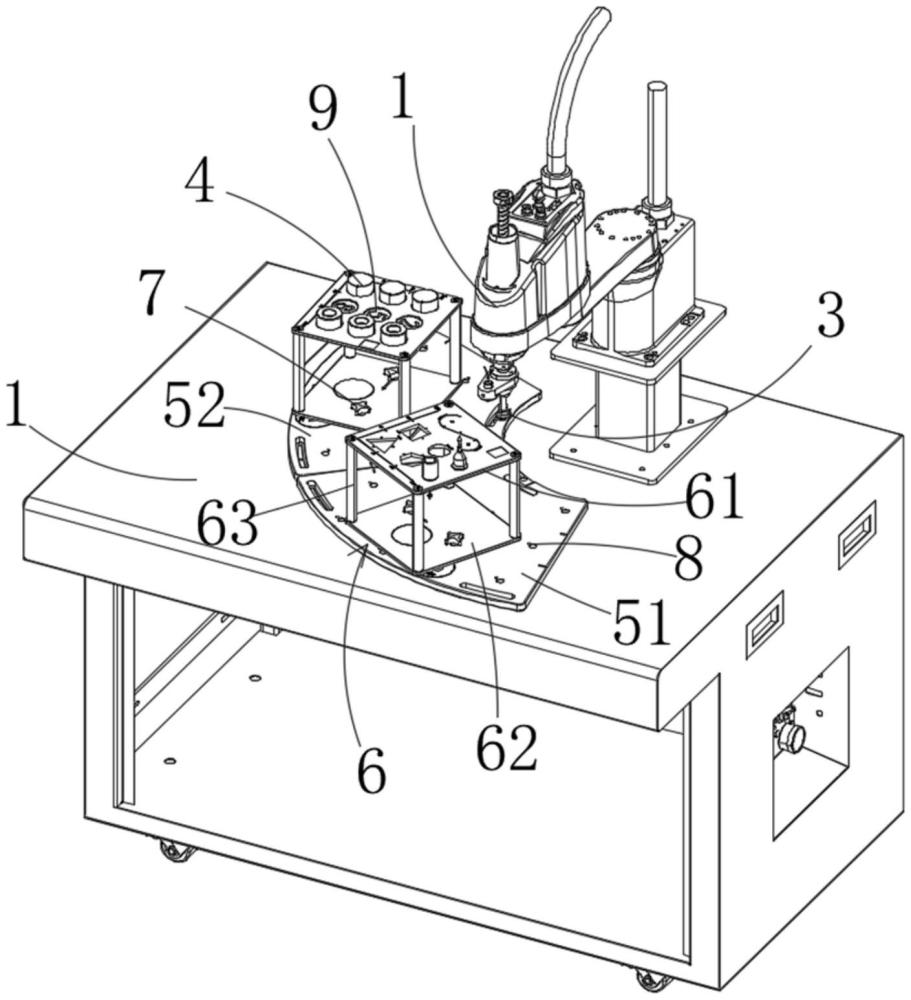
1.一种基础模块位置调节机构,其特征在于,包括基台(1),所述基台(1)的上端设置有多自由度机械臂(2),所述多自由度机械臂(2)的自由端设置有竖直向下的抓取部(3),所述抓取部(3)用于抓取物料(4);
2.根据权利要求1所述的基础模块位置调节机构,其特征在于,所述弧形板(5)与所述物料放置模块(6)通过多个螺栓(7)进行固定。
3.根据权利要求1所述的基础模块位置调节机构,其特征在于,所述弧形板(5)设置有两组,所述多自由度机械臂(2)处于所述弧形板(5)所对应的圆心处。
4.根据权利要求2所述的基础模块位置调节机构,其特征在于,所述基台(1)的上表面分布有多个螺孔(8),所述螺孔(8)与所述螺栓(7)配合实现对所述物料放置模块(6)的固定。
5.根据权利要求1所述的基础模块位置调节机构,其特征在于,所述物料放置模块(6)的上表面设置有多个凹槽(9),所述凹槽(9)内放置有多种形状的所述物料(4)。
6.根据权利要求1所述的基础模块位置调节机构,其特征在于,所述物料(4)的形状包括圆柱形,圆锥形,三角形以及方形。
7.根据权利要求3所述的基础模块位置调节机构,其特征在于,两组所述弧形板(5)的尺寸与形状相同,且所述物料放置模块(6)放置在所述弧形板(5)上的位置相同。
8.根据权利要求1所述的基础模块位置调节机构,其特征在于,两组所述弧形板(5)中的弧形板一(51)的尺寸大于弧形板二(52)的尺寸,所述物料放置模块(6)在所述弧形板一(51)上所处的位置与所述物料放置模块(6)在所述弧形板二(52)上所处的位置存在不同。
9.根据权利要求1所述的基础模块位置调节机构,其特征在于,所述物料放置模块(6)的形状为方形结构。
10.根据权利要求9所述的基础模块位置调节机构,其特征在于,所述物料放置模块(6)包括上底板(61)与下底板(62),所述上底板(61)与所述下底板(62)之间通过多个支撑杆(63)相连接。
技术总结
本技术公开了一种基础模块位置调节机构,包括基台,所述基台的上端设置有多自由度机械臂,所述多自由度机械臂的自由端设置有竖直向下的抓取部,所述抓取部用于抓取物料,所述基台的上端设置有至少两组并列设置的弧形板,所述弧形板的表面可拆卸的连接有多个物料放置模块。本技术通过在物料放置模块上可放置多种类型的物料,并且物料放置模块可根据实际的需要放置弧形板上的不同位置,从而使学员控制工业机器人进行不同操作模式,操作模式更加的丰富多样,更符合于实际生产的过程中,并且相较于现有技术无需更换新的实训平台,可减少成本的投入。
技术研发人员:霰学会,王伟,王钰鹏
受保护的技术使用者:江苏海渡教育科技集团有限公司
技术研发日:20230809
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!