一种机器人轨迹练习平台的制作方法
本技术涉及机器人应用领域,具体涉及一种机器人轨迹练习平台。
背景技术:
1、工业机器人广泛应用于制造业,不仅仅应用于汽车制造业,大到航天飞机的生产,军用装备,高铁的开发,小到圆珠笔的生产都有广泛的应用。机器人实训台作为学习机器人技术的平台,可以帮助学员掌握机器人的相关知识和操作技能。在工业机器人教学过程中,学员在基础阶段的学习课程是一般是通过不同的指令编程来控制机器人进行运动。现有的机器人轨迹训练平台采用机器人控制示教笔沿着正方形、三角形、圆形和弧线进行运动,导致学员无法将操作流程和实际生产加工过程相结合,编程和调试应用能力的掌握度较差,因此无法预期的教学效果。
技术实现思路
1、本实用新型的目的在于:为解决上述问题,本实用新型提供了一种机器人轨迹练习平台。
2、本实用新型为了实现上述目的具体采用以下技术方案,包括:实训台,所述实训台上表面固定有承重座,所述承重座连接有机器人,所述机器人用于操作夹具进行移动;
3、基础模块,所述基础模块固定于实训台的上表面,所述基础模块包括固定顶板,所述固定顶板中央设置有多种形状的轨迹槽,所述固定顶板一侧设置有多个标定尖端;
4、激光雕刻模块,所述激光雕刻模块固定于基础模块一侧,所述激光雕刻模块包括雕刻面板,所述雕刻面板上设置有用于训练的雕刻图案;
5、写字绘画模块,所述写字绘画模块固定于激光雕刻模块的一侧,所述写字绘画模块包括支撑顶板,所述支撑顶板的一角设置有笔托,所述支撑顶板左右两侧固定有用于压紧画纸的夹板。
6、作为上述技术方案的进一步描述,所述机器人为六轴关节式机器人。
7、作为上述技术方案的进一步描述,所述固定顶板、雕刻面板、支撑顶板的上表面均设置有用于定位的坐标系。
8、作为上述技术方案的进一步描述,所述轨迹槽包括方形槽、三角形槽、圆形槽、正六边形槽和样条曲线槽。
9、作为上述技术方案的进一步描述,所述标定尖端设置有金属探针,所述金属探针内部设置有弹簧。
10、作为上述技术方案的进一步描述,所述雕刻面板与实训台台面的夹角为15-20度。
11、作为上述技术方案的进一步描述,所述激光雕刻模块设置有激光雕刻夹具,所述激光雕刻夹具包括红外激光器,所述红外激光器通过套筒连接机器人。
12、作为上述技术方案的进一步描述,所述笔托上固定有用于写字绘画的中性笔,所述中性笔的外壳为弹性橡胶材料。
13、作为上述技术方案的进一步描述,所述画纸的数量为10-30张,所述画纸的材料为铜版纸。
14、作为上述技术方案的进一步描述,所述支撑顶板上下两侧固定有限位块,所述限位块的数量为2-4个。
15、本实用新型的有益效果如下:
16、1、本实用新型,通过机器人、基础模块、激光雕刻模块和写字绘画模块的配合使用,从移动轨迹训练、激光雕刻训练和写字绘画训练三个阶段逐步教会学员对于工业机器人的简单操作,为后续更为复杂的参数编程和机器调试等课程培训做出铺垫。
17、2、本实用新型,标定尖端设置有金属探针,金属探针内部设置有弹簧,当端部受到外力冲击时,尖端受力可迅速回缩,当误操作发生撞击时,可有效保护自身和外部夹具。
18、为更清楚地阐述本实用新型的结构特征和作用,下面结合附图与具体实施例来对本实用新型进行详细说明。
技术特征:
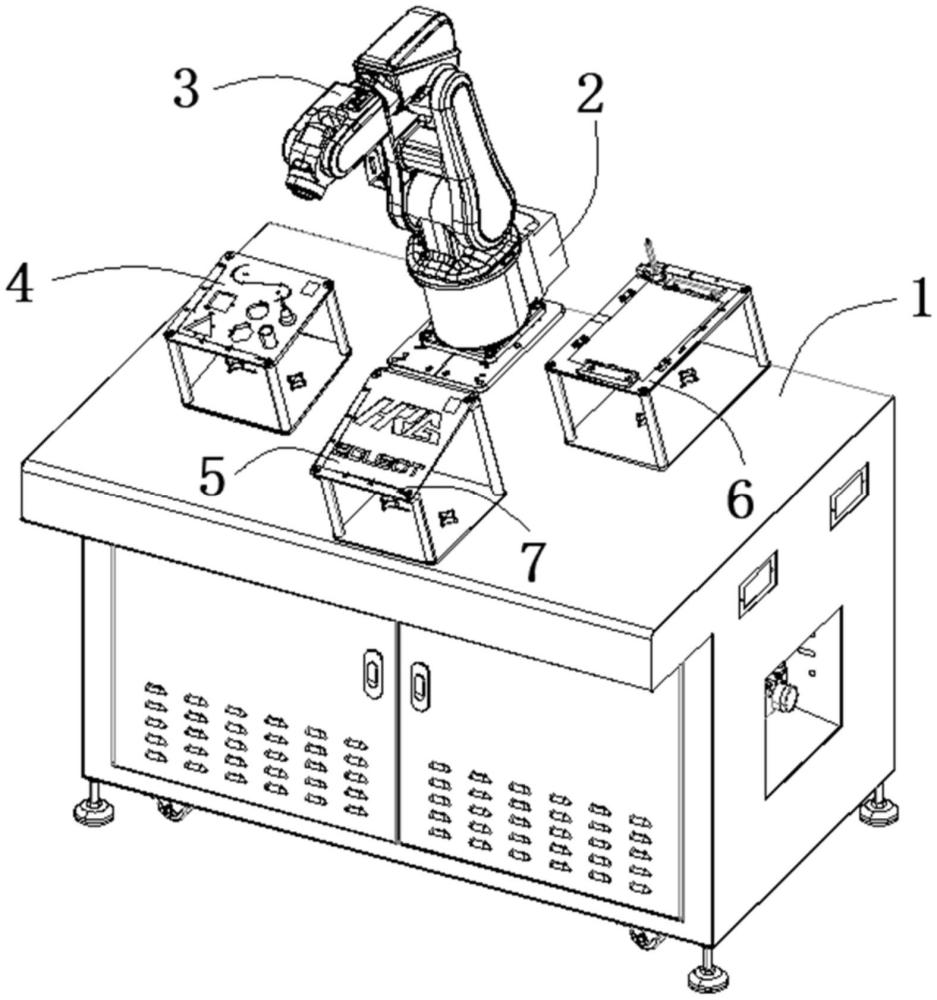
1.一种机器人轨迹练习平台,其特征在于,包括:实训台(1),所述实训台(1)上表面固定有承重座(2),所述承重座(2)连接有机器人(3),所述机器人(3)用于操作夹具进行移动;
2.根据权利要求1所述的一种机器人轨迹练习平台,其特征在于,所述机器人(3)为六轴关节式机器人。
3.根据权利要求1所述的一种机器人轨迹练习平台,其特征在于,所述固定顶板(41)、雕刻面板(51)、支撑顶板(61)的上表面均设置有用于定位的坐标系(7)。
4.根据权利要求1所述的一种机器人轨迹练习平台,其特征在于,所述轨迹槽(42)包括方形槽(421)、三角形槽(422)、圆形槽(423)、正六边形槽(424)和样条曲线槽(425)。
5.根据权利要求1所述的一种机器人轨迹练习平台,其特征在于,所述标定尖端(43)设置有金属探针(431),所述金属探针(431)内部设置有弹簧(432)。
6.根据权利要求1所述的一种机器人轨迹练习平台,其特征在于,所述雕刻面板(51)与实训台(1)台面的夹角为15-20度。
7.根据权利要求1所述的一种机器人轨迹练习平台,其特征在于,所述激光雕刻模块(5)设置有激光雕刻夹具(53),所述激光雕刻夹具(53)包括红外激光器(531),所述红外激光器(531)通过套筒(532)连接机器人(3)。
8.根据权利要求1所述的一种机器人轨迹练习平台,其特征在于,所述笔托(62)上固定有用于写字绘画的中性笔(65),所述中性笔(65)的外壳为弹性橡胶材料。
9.根据权利要求1所述的一种机器人轨迹练习平台,其特征在于,所述画纸(63)的数量为10-30张,所述画纸(63)的材料为铜版纸。
10.根据权利要求1所述的一种机器人轨迹练习平台,其特征在于,所述支撑顶板(61)上下两侧固定有限位块(66),所述限位块(66)的数量为2-4个。
技术总结
本技术公开了一种机器人轨迹练习平台,包括:实训台,实训台上表面固定有承重座,承重座连接有机器人,机器人周围设置有三个训练模块:基础模块,其固定顶板中央设置有五个不同形状的轨迹槽,一侧设置有两个标定尖端;激光雕刻模块,其雕刻面板上设置有用于训练的雕刻图案;写字绘画模块,其支撑顶板一角设置有笔托,左右两侧固定有用于压紧画纸的夹板。本技术通过机器人、基础模块、激光雕刻模块和写字绘画模块的配合使用,从移动轨迹训练、激光雕刻训练和写字绘画训练三个阶段逐步教会学员对于工业机器人的简单操作,为后续更为复杂的参数编程和机器调试等课程培训做出铺垫。
技术研发人员:霰学会,王伟,宋建辉
受保护的技术使用者:江苏海渡教育科技集团有限公司
技术研发日:20231007
技术公布日:2024/6/2
- 还没有人留言评论。精彩留言会获得点赞!