一种无人机模拟卫星轨迹规划方法与流程
本发明涉及一种无人机模拟卫星轨迹规划方法,属于航天测控。
背景技术:
1、在航天测控等领域,地面测控站操作人员的操作培训中包括跟踪在轨卫星,而在轨卫星资源有限、安全风险高,且受限于卫星过境时间,无法长时间系统性配合地面测控站进行训练。因此利用无人机搭载载荷模拟卫星过境,合理规划无人机飞行航迹,为地面测控站提供跟踪目标。无人机模拟卫星航迹规划要突出模拟卫星航迹的逼真度,根据要模拟卫星的轨道参数和地面测控站坐标计算无人机飞行路径,使其相对地面测控站的方位、俯仰始终与真实卫星一致,且规划的航迹满足无人机的机动性能指标。
2、公布号为cn114879228a的发明专利文件公开了一种无人机模拟卫星过境的方法及系统。该方法的无人机按照固定高度h飞行,根据待模拟卫星过境期间各时间点待模拟卫星相对于地面测控站的方位角a和俯仰角e,确定固定高度h对应的位置点,根据每个时间点的斜距r、方位角a和俯仰角e,计算各位置点无人机的相对坐标,根据各位置点无人机的相对坐标和地面测控站经度、纬度和高度数据,生成各时间点无人机航路点的经度、纬度和高度数据,并将各时间点无人机航路点的经度、纬度和高度数据注入无人机,地面测控站按照卫星轨道生成跟踪计划,以在预设时间内对无人机进行跟踪测控,响应用户操作控制无人机航路点和任务载荷,以模拟正常状态和应急状态下的待模拟卫星。该方法以固定高度规划无人机,在模拟卫星进站和出站的过程中,由于卫星与无人机的距离较远,在相同的角速度下,无人机的线速度会比较大,超出无人机机动范围,此时若满足无人机的机动性能,只能降低无人机飞行高度,而无人机飞行高度过低,则会出现微小的飞行偏差带来较大的跟踪误差,使得跟踪效果变差。若要规避该问题,只能放弃卫星进站和出站阶段的模拟,然而对于近地轨道卫星,过境的时间也就在10分钟左右,若再放弃卫星进站和出站阶段的模拟,模拟卫星的时段大大缩短,模拟效果不佳,从而无法满足实际需求。
技术实现思路
1、本发明的目的是提供一种无人机模拟卫星轨迹规划方法,用以解决以固定飞行高度的航迹模拟卫星轨迹跟踪误差大及卫星进站、出站阶段无人机速度过快的问题。
2、为实现上述目的,本发明的方案包括:
3、本发明的一种无人机模拟卫星轨迹规划方法,包括以下步骤:
4、根据地面测控站的坐标以及被跟踪卫星的双行根数,计算出卫星相对地面测控站的测站系坐标,所述测站系坐标包括方位、俯仰角度和卫星相对地面测控站的距离;
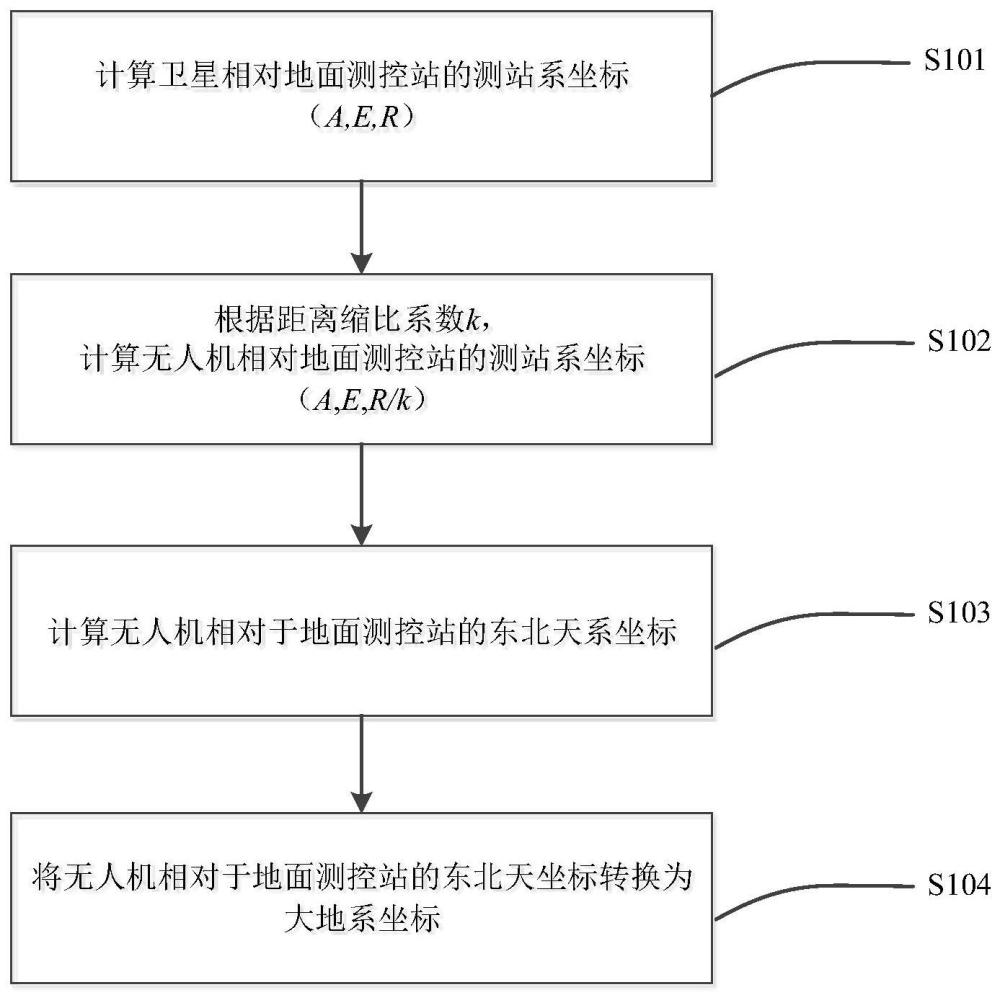
5、令无人机与卫星处于同一方位、俯仰角度,在无人机飞行高度、飞行速度以及垂直方向上爬升/下降的速度约束下计算得到距离缩比系数,根据所述距离缩比系数以及卫星相对地面测控站的测站系坐标得到无人机相对地面测控站的测站系坐标,所述距离缩比系数指的是卫星和地面测控站的距离与无人机和地面测控站的距离的比值;
6、基于无人机相对地面测控站的测站系坐标得到卫星过境期间无人机对应的飞行轨迹信息,利用无人机的飞行轨迹信息实现模拟被跟踪卫星轨迹,所述轨迹信息至少包括飞行时间、经度、纬度以及飞行高度。
7、进一步地,所述距离缩比系数是基于距离缩比系数与卫星距离之间的函数关系确定的,所述的函数关系是通过模拟卫星进站、出站、过顶时满足约束条件的距离缩比系数和卫星进站、出站、过顶时卫星与地面测控站的直线距离拟合得到。
8、进一步地,模拟卫星进站时距离缩比系数的确定方式为:在无人机模拟卫星进站时满足卫星进站时的约束条件下,选取最小的距离缩比系数作为模拟卫星进站时距离缩比系数,所述的卫星进站时的约束条件为:
9、
10、式中,huav为无人机的最大升限高度,vuav为无人机的最大飞行速度,vz_upuav为垂直方向上无人机的最大爬升速度,h0为无人机规划进站时的最大飞行高度,v0为无人机规划进站时的最大飞行速度,vz0为无人机规划进站时的垂直方向上最大爬升速度。
11、进一步地,模拟卫星出站时距离缩比系数的确定方式为:在无人机模拟卫星出站时满足卫星出站时的约束条件下,选取最小的距离缩比系数作为模拟卫星出站时距离缩比系数,所述的卫星出站时的约束条件为:
12、
13、式中,huav为无人机的最大升限高度,vuav为无人机的最大飞行速度,vz_downuav为无人机的最大下降速度,hδt为无人机规划出站时的最大飞行高度,vδt为无人机规划出站时的最大飞行速度,vzδt为无人机规划出站时对应的最大下降速度。
14、进一步地,模拟卫星过顶时距离缩比系数的确定方式为:在模拟卫星过顶时,无人机满足卫星过顶时的约束条件下,选取最小的距离缩比系数作为模拟卫星过顶时距离缩比系数,所述的卫星过顶时的约束条件为:
15、
16、式中,huav为无人机的最大升限高度,vuav为无人机的最大飞行速度,vzuav为垂直方向上无人机的最大飞行速度,h0为规划进站时的最大飞行高度,hδt/2为无人机规划过顶时的最大飞行高度,vδt/2为无人机规划过顶时的最大飞行速度。
17、进一步地,距离缩比系数与卫星距离之间的函数关系为:
18、k=ar2+br+c
19、式中,k为距离缩比系数,a、b、c均为拟合系数,r为卫星与地面测控站的直线距离。
20、进一步地,所述的无人机的飞行轨迹信息确定的过程为:根据无人机相对地面测控站的测站系坐标得到无人机相对于地面测控站的东北天系坐标,将所述东北天系坐标转换为地心系坐标,再由地心系坐标转换为大地系坐标,所述的大地系坐标即为无人机对应的飞行轨迹信息。
21、本发明的有益效果为:本发明的无人机模拟卫星轨迹规划方法,基于现有的无人机模拟卫星轨迹规划方法,主要采用的是距离缩比方式规划无人机的轨迹模拟卫星轨迹,即通过坐标的形式获取卫星相对地面测控站的轨迹信息,令无人机相对于地面测控站的方位角、俯仰角度与卫星的方位角、俯仰角度一致,而无人机距地面测控站的直线距离则是卫星距地面测控站的直线距离的等效缩比,与现有“固定高度法”的飞行方式相比,该方法在卫星过境过程中,无人机能够实时处于地面测控站与卫星的连线上,无人机的飞行轨迹更接近于卫星的实际轨迹,从而减小了跟踪角度的误差,以距离缩比的方式规划无人机轨迹,能够模拟卫星进站、出站阶段飞行高度低,航捷点附近飞行高度高,进而解决了卫星进站、出站阶段无人机飞行速度过快的问题,更完整地模拟了卫星过境时段。
技术特征:
1.一种无人机模拟卫星轨迹规划方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的无人机模拟卫星轨迹规划方法,其特征在于,所述距离缩比系数是基于距离缩比系数与卫星距离之间的函数关系确定的,所述的函数关系是通过模拟卫星进站、出站、过顶时满足约束条件的距离缩比系数和卫星进站、出站、过顶时卫星与地面测控站的直线距离拟合得到。
3.根据权利要求2所述的无人机模拟卫星轨迹规划方法,其特征在于,模拟卫星进站时距离缩比系数的确定方式为:在无人机模拟卫星进站时满足卫星进站时的约束条件下,选取最小的距离缩比系数作为模拟卫星进站时距离缩比系数,所述的卫星进站时的约束条件为:
4.根据权利要求2所述的无人机模拟卫星轨迹规划方法,其特征在于,模拟卫星出站时距离缩比系数的确定方式为:在无人机模拟卫星出站时满足卫星出站时的约束条件下,选取最小的距离缩比系数作为模拟卫星出站时距离缩比系数,所述的卫星出站时的约束条件为:
5.根据权利要求2所述的无人机模拟卫星轨迹规划方法,其特征在于,模拟卫星过顶时距离缩比系数的确定方式为:在模拟卫星过顶时,无人机满足卫星过顶时的约束条件下,选取最小的距离缩比系数作为模拟卫星过顶时距离缩比系数,所述的卫星过顶时的约束条件为:
6.根据权利要求2所述的无人机模拟卫星轨迹规划方法,其特征在于,距离缩比系数与卫星距离之间的函数关系为:
7.根据权利要求1所述的无人机模拟卫星轨迹规划方法,其特征在于,所述的无人机的飞行轨迹信息确定的过程为:根据无人机相对地面测控站的测站系坐标得到无人机相对于地面测控站的东北天系坐标,将所述东北天系坐标转换为地心系坐标,再由地心系坐标转换为大地系坐标,所述的大地系坐标即为无人机对应的飞行轨迹信息。
技术总结
本发明涉及一种无人机模拟卫星轨迹规划方法,属于航天测控技术领域。首先计算出卫星相对地面测控站的测站系坐标,令无人机与卫星处于同一方位、俯仰角度,在无人机飞行高度、飞行速度以及垂直方向上爬升/下降的速度约束下计算得到距离缩比系数,根据所述距离缩比系数以及卫星相对地面测控站的测站系坐标得到无人机相对地面测控站的测站系坐标,基于无人机相对地面测控站的测站系坐标得到卫星过境期间无人机对应的飞行轨迹信息,利用无人机的飞行轨迹信息实现模拟被跟踪卫星轨迹,本方法模拟的飞行轨迹更接近于卫星的实际轨迹,减小了跟踪角度的误差。
技术研发人员:耿丹,高澜,刘永利,彭进先,赵超,田苗苗,吕丽华,秦剑琪,王少磊,李东阳,张杰
受保护的技术使用者:中国人民解放军63611部队
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!