一种搭载云台
1.本实用新型涉及一种支撑设备,特别是一种搭载云台。
背景技术:
2.目前,煤炭依然是我国主体能源,煤矿井下环境复杂恶劣,使煤矿设备故障频发,对采煤安全造成严重威胁。国家煤矿安监局于2020年3月公布了《煤矿机器人重点研发目录》,其中的安控类第三十四项名称为:井筒安全智能巡检机器人。基于此,国内的部分专家学者为解决常规钢丝绳垂直爬升机器人易打滑、机动性差的问题,研究设计了适用于钢丝绳外形的稳定、高效的回转攀爬机器人。回转攀爬机器人有拍摄需求,需要在回转机构上安装云台,用于安装摄像机。然而回转机构是持续转动的,现有的云台固定于回转机构,因此,云台会随回转机构转动,不能对一方向进行定位拍摄。
3.然而现有的搭载云台还存在着以下问题:
4.1. 固定于转动的回转机构时,不能对一方向进行定位拍摄。
5.2.现有搭载云台不能实现自动转动。
6.3.现有搭载云台安装方式复杂。
技术实现要素:
7.本实用新型要解决的技术问题是针对上述现有技术的不足,而提供一种搭载云台,搭载云台固定于转动的回转机构时,能对一方向进行定位拍摄;
8.为解决上述技术问题,本实用新型采用的技术方案是:
9.一种搭载云台,安装在回转机构上方,包括云台、云台导轨、驱动机构和控制机构;
10.驱动机构包括:上限位板、顶板、输出轴齿轮、底板、下限位板和直流电机,直流电机固定于回转机构上,上限位板、顶板、输出轴齿轮、底板、下限位板从上至下依次设置于直流电机的轴上,轴垂直于回转机构,顶板朝向输出轴齿轮一面开设有槽,同时,底板朝向输出轴齿轮一面也开设有槽;控制机构包括:pid控制器、陀螺仪传感器、加速度传感器和主控芯片;控制机构设置于回转机构上;陀螺仪传感器、加速度传感器与主控芯片连接,同时,主控芯片与pid控制器连接;云台为环形结构,云台内圈一周设置有云台导轨;且云台导轨内圈一周设置有内齿轮,内齿轮与输出轴齿轮啮合;云台导轨上下面设置有导轨, 顶板上的槽扣接于云台导轨上面的导轨,底板上的槽扣接于云台导轨下面的导轨。
11.作为本实用新型的进一步优选,驱动机构至少为三个,环形等距分布在导轨上。
12.本实用新型具有如下有益效果:
13.(1)本实用新型的搭载云台固定于转动的回转机构时,能对一方向进行定位拍摄;
14.(2)本实用新型搭载云台能实现自动转动。
15.(3)本实用新型搭载云台结构简单,安装方便。
附图说明
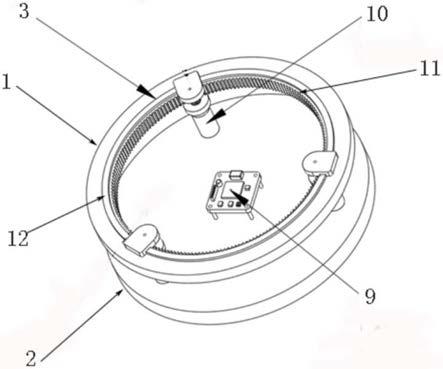
16.图1是本实用新型的结构示意图;
17.图2是驱动机构的部分结构示意图;
18.图3是驱动机构的整体结构示意图。
19.其中有:1.云台;2.回转机构;3.云台导轨;4.顶板;5.上限位板;6.输出轴齿轮;7.直流电机;8.下限位板;9.控制机构;10.驱动机构;11.内齿轮;12.导轨;13.底板;14.轴。
具体实施方式
20.下面结合附图和具体较佳实施方式对本实用新型作进一步详细的说明。
21.本实用新型的描述中,需要理解的是,术语“左侧”、“右侧”、“上部”、“下部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,“第一”、“第二”等并不表示零部件的重要程度,因此不能理解为对本实用新型的限制。本实施例中采用的具体尺寸只是为了举例说明技术方案,并不限制本实用新型的保护范围。
22.如图1至3所示,一种搭载云台1,安装在回转机构2上方,包括云台1、云台导轨3、驱动机构10和控制机构9;
23.驱动机构10包括:上限位板5、顶板4、输出轴齿轮6、底板13、下限位板8和直流电机7,直流电机7固定于回转机构2上,上限位板5、顶板4、输出轴齿轮6、底板13、下限位板8从上至下依次设置于直流电机7的轴14上,轴14垂直于回转机构2,顶板4朝向输出轴齿轮6一面开设有槽,同时,底板13朝向输出轴齿轮6一面也开设有槽;
24.上限位板和下限位板是固定于电机的轴上;顶板和底板是开设有通孔,直流电机的轴贯穿于通孔;顶板和底板可沿电机的轴相对转动。
25.控制机构9包括:pid控制器、陀螺仪传感器、加速度传感器和主控芯片;控制机构9设置于回转机构2上;陀螺仪传感器、加速度传感器与主控芯片连接,同时,主控芯片与pid控制器连接;云台1为环形结构,云台1内圈一周设置有云台导轨3;且云台导轨3内圈一周设置有内齿轮11,内齿轮11与输出轴齿轮6啮合;云台导轨3上下面设置有导轨12, 顶板4上的槽扣接于云台导轨3上面的导轨12,底板13上的槽扣接于云台导轨3下面的导轨12。摄像机或雷达传感器等固定于云台1上,进行拍摄。
26.作为本实用新型的进一步优选,驱动机构10至少为三个,环形等距分布在导轨12上。
27.云台1与直流电机7的相对位置由输出轴齿轮6上下面的顶板4保证,顶板4上设计有矩形槽,搭载云台1上设计有矩形导轨12,两者组成滑动副相互嵌合以保证相对位置并提供支撑。
28.所述主控芯片采用ad转换传感器信号,输出到 pid控制器,通过脉冲宽度调制输出不同的电压,对直流电机7进行控制,直流电机7控制输出轴齿轮6转动。
29.工作原理:
30.使用时:云台1固定于回转机构2上方,回转机构2在持续转动,通过加速度传感器与陀螺仪传感器监测回转机构2的运动状态;数据传输至主控芯片,经主控芯片的运算,传
递到pid控制器,pid控制器对直流电机7进行调速;直流电机7控制输出轴齿轮6,通过输出轴齿轮6与内齿轮11的齿轮啮合传递运动,进而控制云台1相对回转机构转动,使云台1的转动方向与回转机构2转动方向相反,且转动角度大小相同,使云台1和摄像机相对于地面静止,云台1不会随回转机构2转动,能对一方向进行定位拍摄。
31.以上详细描述了本实用新型的优选实施方式,但是,本实用新型并不限于上述实施方式中的具体细节,在本实用新型的技术构思范围内,可以对本实用新型的技术方案进行多种等同变换,这些等同变换均属于本实用新型的保护范围。
技术特征:
1.一种搭载云台,安装在回转机构上方,其特征在于:包括云台、云台导轨、驱动机构和控制机构;驱动机构包括:上限位板、顶板、输出轴齿轮、底板、下限位板和直流电机,直流电机固定于回转机构上,上限位板、顶板、输出轴齿轮、底板、下限位板从上至下依次设置于直流电机的轴上,轴垂直于回转机构,顶板朝向输出轴齿轮一面开设有槽,同时,底板朝向输出轴齿轮一面也开设有槽;控制机构包括:pid控制器、陀螺仪传感器、加速度传感器和主控芯片;控制机构设置于回转机构上;陀螺仪传感器、加速度传感器与主控芯片连接,同时,主控芯片与pid控制器连接;云台为环形结构,云台内圈一周设置有云台导轨;且云台导轨内圈一周设置有内齿轮,内齿轮与输出轴齿轮啮合;云台导轨上下面设置有导轨, 顶板上的槽扣接于云台导轨上面的导轨,底板上的槽扣接于云台导轨下面的导轨。2.根据权利要求1所述的一种搭载云台,其特征在于:所述驱动机构至少为三个,环形等距分布在导轨上。
技术总结
本实用新型公开了一种搭载云台,安装在回转机构上方,包括云台、云台导轨、驱动机构和控制机构;驱动机构包括:上限位板、顶板、输出轴齿轮、底板、下限位板和直流电机,直流电机固定于回转机构上,上限位板、顶板、输出轴齿轮、底板、下限位板依次设置于直流电机的轴上,轴垂直于回转机构,顶板朝向输出轴齿轮一面开设有槽,同时,底板朝向输出轴齿轮一面也开设有槽;控制机构包括:PID控制器、陀螺仪传感器、加速度传感器和主控芯片;控制机构设置于回转机构上;陀螺仪传感器、加速度传感器与主控芯片连接,同时,主控芯片与PID控制器连接;云台为环形结构,云台内圈一周设置有云台导轨。云台内圈一周设置有云台导轨。云台内圈一周设置有云台导轨。
技术研发人员:孙正阳 刘希文 季炜 陈沛儒 马继雨 李子昊 李卓奇 马晓斌
受保护的技术使用者:中国矿业大学
技术研发日:2021.03.11
技术公布日:2021/11/15
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1