VR虚拟眼镜瞳距调整传动机构的制作方法
vr虚拟眼镜瞳距调整传动机构
技术领域
1.本实用新型属于vr眼镜瞳距调整装置技术领域,特别涉及一种vr虚拟眼镜瞳距调整传动机构。
背景技术:
2.vr眼镜(虚拟现实眼镜)已经得到广泛的应用。瞳距是人双眼瞳孔间的距离,人的瞳距不是固定不变的,随着年龄的增加,一个人的瞳距也在发生变化直至成年。目前的vr眼镜一般都是将内容分屏,通过镜片叠加成像。这时容易会导致人眼瞳孔中心、透镜中心、屏幕(分屏后)中心不在一条直线上,从而视觉效果很差,出现不清晰、变形等问题。调节镜片位置(vr眼镜瞳距)和人眼瞳距匹配,就可以改善这种状况。因此,vr虚拟眼镜的瞳距调节是一个必有的功能。目前,vr眼镜瞳距调整多为手动调整,需要外置调整旋钮,影响vr整体美观。
技术实现要素:
3.本实用新型的目的在于克服上述的缺陷,提供一种vr虚拟眼镜瞳距调整传动机构,实现了vr虚拟眼镜瞳距自动调整功能。
4.本实用新型的目的是通过以下技术方案实现:一种vr虚拟眼镜瞳距调整传动机构,其特征在于:包括自锁丝杆、锥齿轮、斜齿轮、蜗杆、电机驱动板、自动瞳距测量仪和步进电机;所述自锁丝杆包括相对设置的等长左侧丝杆和右侧丝杆,两丝杆上分别设有旋转方向相反的左旋螺纹和右旋螺纹,该螺纹上分别旋接丝杆螺母,所述两丝杆的相对端部分别设有相互啮合的锥齿轮,其中一丝杆的末端安装斜齿轮,斜齿轮与蜗杆连接,蜗杆与步进电机连接,所述步进电机由电机驱动板根据自动瞳距测量仪的测量值发出脉冲信号驱动。
5.所述vr虚拟眼镜瞳距调整传动机构还包括反射式光耦,所述反射式光耦安装在一侧镜片罩上,位于丝杆移动极限位置处,该侧丝杆上安装反射塑胶块,用于遮挡光耦。
6.与现有技术相比,本实用新型的有益效果是:
7.1、使用1个微型电机驱动微型丝杆,推动丝杆螺母来调节vr眼镜瞳距,无外置旋钮,通过安装在vr眼镜罩片上沿内侧的自动瞳距测量仪测出佩戴者的瞳距,发出脉冲信号后,驱动步进电机带动传动组件推动镜片到达正确的瞳距位置,从而实现自动、双向瞳距调整,简化了vr的外观设计。
8.2、当用户初次开机时,通过光耦,系统会驱动镜片到达极限位置,从而确定初始位置,从初始位置开始,驱动电机使镜片运动到佩戴者的瞳距位置。
9.3、丝杆可以自锁,调整好后的瞳距,如果同一个使用者继续试用,可以不必重新调整,自锁丝杆保证瞳距不会因为震动等产生变化。
10.4、利用光耦和步进微型电机结合,可以限制镜片平移位置极限。
附图说明
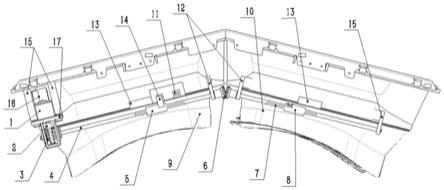
11.图1是本实用新型结构示意图。
12.图2是本实用新型自锁丝杆变化状态结构示意图。
13.其中:
14.1-步进电机,2-蜗杆,3-斜齿轮,4-自锁左侧丝杆,5-左侧丝杆螺母,6-锥齿轮,7-自锁右侧丝杆,8-右侧丝杆螺母,9-左侧镜片罩,10-右侧镜片罩,11-反射式光耦,12-塑胶阻挡块,13-自动瞳距测量仪,14-反射塑胶块,15-vr眼镜支架,16-电机驱动板,17-电机支架。
具体实施方式
15.实施例:如图1、2所示,一种vr虚拟眼镜瞳距调整传动机构,安装在vr虚拟眼镜上,在vr虚拟眼镜的镜框两端分别固定vr眼镜支架15和电机支架17,步进电机1和电机驱动板16安装在电机支架17上,在vr虚拟眼镜的左侧镜片罩9和右侧镜片罩10的相邻里侧分别一体成型有塑胶阻挡块12,vr虚拟眼镜瞳距调整传动机构包括两个相对设置的等长左侧丝杆4和右侧丝杆7,左侧丝杆4的一端插装在左侧镜片罩9里侧的塑胶阻挡块12通孔内,左侧丝杆4的另一端安装斜齿轮3,斜齿轮3与蜗杆2连接,蜗杆2与步进电机1连接,右侧丝杆7的一端插装在右侧镜片罩10里侧的塑胶阻挡块12通孔内,另一端与右侧vr眼镜支架15连接,两丝杆上分别设有旋转方向相反的左旋螺纹和右旋螺纹,该螺纹上分别旋接左侧丝杆螺母5和右侧丝杆螺母8,所述两丝杆的相对端部分别设有相互啮合的锥齿轮6,在vr虚拟眼镜的左侧镜片罩9和右侧镜片罩10上沿的内侧分别安装自动瞳距测量仪13,自动瞳距测量仪13测量瞳距后,由电机驱动板16发出脉冲信号驱动步进电机1;为了限制镜片的平移位置,在vr虚拟眼镜的镜框上安装一光耦11,光耦11位于两丝杆移动极限位置处,在左侧丝杆螺母5上还安装有用于遮挡光耦的反射塑胶块14,反射塑胶块14与左侧丝杆螺5和左侧镜片罩9一体成型。
16.工作原理:
17.调节瞳距时,首先由自动瞳距测量仪13测出佩戴者瞳距,通过电机驱动板16发出脉冲信号驱动微型步进电机1旋转,带动蜗杆2旋转,通过蜗杆2与斜齿轮3配合,推动斜齿轮3旋转,从而带动左侧丝杆4转动,继而带动左侧丝杆螺母5平移,使左侧镜片9平移;同时左侧丝杆4转动,通过锥齿轮6带动右侧丝杆7同向旋转,推动右侧丝杆螺母8沿着左侧镜片9平移相反方向平移,直到到达正确的瞳距为止,从而实现自动、双向瞳距调整。其中,当反射塑胶块14随左侧丝杆平移,遮挡住反射式光耦11,反射式光耦11有一触发信号,即到达极限位置,此时,步进电机1停止移动。整个系统均是微型设备,电机加传动系统总重量约为16克。
18.以上结合具体实施例描述了本实用新型的技术原理,这些描述只是为了解释本实用新型的技术原理,而不能以任何方式解释为对本实用新型保护范围的限制。基于此解释,本领域内的技术人员不需要付出创造性的劳动即可联想到本实用新型的其他具体实施方式都将落入本实用新型的保护范围。
技术特征:
1.一种vr虚拟眼镜瞳距调整传动机构,其特征在于:包括自锁丝杆、锥齿轮、斜齿轮、蜗杆、电机驱动板、自动瞳距测量仪和步进电机;所述自锁丝杆包括相对设置的等长左侧丝杆和右侧丝杆,两丝杆上分别设有旋转方向相反的左旋螺纹和右旋螺纹,该螺纹上分别旋接丝杆螺母,所述两丝杆的相对端部分别设有相互啮合的锥齿轮,其中一丝杆的末端安装斜齿轮,斜齿轮与蜗杆连接,蜗杆与步进电机连接,所述步进电机由电机驱动板根据自动瞳距测量仪的测量值发出脉冲信号驱动。2.根据权利要求1所述vr虚拟眼镜瞳距调整传动机构,其特征在于:还包括反射式光耦,所述反射式光耦安装在一侧镜片罩上,位于丝杆移动极限位置处,该侧丝杆上安装反射塑胶块,用于遮挡光耦。
技术总结
一种VR虚拟眼镜瞳距调整传动机构,属于VR眼镜瞳距调整装置技术领域,自锁丝杆包括相对设置的等长左侧丝杆和右侧丝杆,两丝杆上分别设有旋转方向相反的左旋螺纹和右旋螺纹,该螺纹上分别旋接丝杆螺母,所述两丝杆的相对端部分别设有相互啮合的锥齿轮,其中一丝杆的末端安装斜齿轮,斜齿轮与蜗杆连接,蜗杆与步进电机连接,所述步进电机由电机驱动板根据自动瞳距测量仪的测量值发出脉冲信号驱动。本实用新型的优点是:利用光耦和步进微型电机结合,限制镜片平移位置极限,实现自动、双向瞳距调整。双向瞳距调整。双向瞳距调整。
技术研发人员:李凤鸣 高嵩 徐荣光
受保护的技术使用者:天津九信科技有限公司
技术研发日:2021.12.20
技术公布日:2022/4/13
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1