柔性布线体、驱动系统以及摄像装置
1.本发明涉及一种柔性布线体、驱动系统以及摄像装置。
2.本发明基于2020年2月10日在日本技术的特愿2020-021006号主张优先权,并在此援用其内容。
背景技术:
3.一些智能手机等的照相机具有机械手抖校正(ois:optical image stabilization;光学稳像)功能和机械聚焦功能。这是通过利用音圈马达(vcm)使透镜平移来实现的。
4.此外,还存在不移动透镜而使摄像元件(cmos成像器等)移动的ois系统。虽然使透镜绕轴旋转没有效果,但通过移动摄像元件能够校正旋转方向上的手抖,这是该ois系统的优点。这种ois系统对于智能手机来说太大而且太贵,所以仅在单反照相机中采用。
5.然而近年来,希望在智能手机中采用摄像元件移动型ois系统的需求日渐高涨。为了将其装载到智能手机上,需要足够小且廉价地制得ois系统,因此对mems(micro electro mechanical systems:微机电系统)技术的利用进行了研究。
6.通过使用mems技术,能够以与摄像元件相同程度的占据面积(footprint)来实现平移且旋转的致动器,但若设计为在多轴上产生几十μm以上的较大的位移,会导致致动器的产生力变小。另一方面,需要从摄像元件将多达几十根布线取出到外部,而且该布线的一部分是进行高速通信的高频布线,另一部分是用于向耗电较大的摄像元件供给电流的电源布线。为了使摄像元件移动,需要将这些布线一起(拖拉)移动,其阻力对于小型致动器而言成为较大的负载。因此,为了实现摄像元件移动型的小型ois系统,在提高致动器的产生力的同时,如何从摄像元件取出布线是一个关键点。
7.以往,存在一种多轴mems组件,其具备构成为进行3轴移动的mems致动器。例如,公开了一种mems致动器,其具有一端安装在mems致动器芯部、另一端安装在外侧框体的导电性弯曲部,该导电性弯曲部将电信号从mems致动器芯部的光电转换元件供给至外侧框体(专利文献1)。另外,公开了一种mems致动器,其具有如下结构:通过从周围按压外侧框体,利用卡锁结构固定构成外侧框体的多个杆,从而使与外侧框体和内侧框体连接的u字形薄膜布线向上立起(专利文献2)。在该mems致动器中,伴随着摄像元件的移动,u字形薄膜布线以倒下或立起的方式变形,由此多个布线的机械负载(机械阻力)变小。
8.现有技术文献
9.专利文献
10.专利文献1:美国专利申请公开第2019/0227266号
11.专利文献2:美国专利申请公开第2015/0341534号
技术实现要素:
12.发明所要解决的问题
13.然而,在上述专利文献1的技术中,没有公开导电性弯曲部能否使用于高速通信的高频信号和用于驱动摄像元件的大电流这两者流动,存在改善的余地。另外,根据上述专利文献2的技术,外侧框体的构造复杂,并且mems致动器的组装工序繁琐,此外,安装于mems致动器的摄像元件的定位性能令人担忧。
14.本发明的目的在于提供一种柔性布线体、驱动系统以及摄像装置,其能够使用于高速通信的高频信号和用于驱动摄像元件的大电流这两者稳定地流动,并且能够提高安装于致动器的摄像元件的定位性能,进而不需要繁杂的组装工序也能够应对大量生产。
15.用于解决问题的方案
16.为了实现上述目的,本发明提供以下手段。
17.[1]一种柔性布线体,连接随致动器移动的半导体装置和位于该半导体装置外侧的框体,其中所述致动器执行在相互正交的3个方向上的平移和绕所述3个方向上的轴的旋转中的至少1个运动,其特征在于,包括:
[0018]
主体部分,其载置有所述半导体装置,并与所述半导体装置电连接;以及
[0019]
多个臂部,其从所述主体部分向所述框体延伸,并以三维方式弯曲。
[0020]
[2]根据上述[1]所述的柔性布线体,其特征在于,
[0021]
所述臂部以具有与所述主体部分的主面相交的主面的方式弯曲,进而折回弯曲,
[0022]
通过所述臂部的变形来对绕所述半导体装置的横向、纵向以及相对于所述半导体装置的主面垂直的方向上的轴的旋转提供自由度。
[0023]
[3]根据上述[1]或[2]所述的柔性布线体,其特征在于,
[0024]
所述多个臂部为4个以上。
[0025]
[4]根据上述[1]至[3]中任一项所述的柔性布线体,其特征在于,
[0026]
在所述主体部分的俯视图中,所述多个臂部以所述主体部分为基准对称配置,
[0027]
所述多个臂部折回弯曲,由此维持由弹性变形产生的力平衡的状态。
[0028]
[5]根据上述[1]至[4]中任一项所述的柔性布线体,其特征在于,
[0029]
所述臂部包括:
[0030]
第一部位,其具有相对于所述主体部分的主面实质上垂直的主面;
[0031]
第二部位,其设置在所述第一部位的一端,并折回弯曲;
[0032]
第三部位,其与所述第一部位相对配置;以及
[0033]
第四部位,其设置在所述第三部位的一端,具有与所述主体部分的主面实质上平行的主面,
[0034]
所述第一部位、所述第二部位以及所述第三部位相对于所述主体部分的主面实质上垂直配置。
[0035]
[6]根据上述[1]至[5]中任一项所述的柔性布线体,其特征在于,
[0036]
所述臂部由树脂层和在所述树脂层上排列形成、且相互绝缘的多个线状导电层构成。
[0037]
[7]根据上述[6]所述的柔性布线体,其特征在于,
[0038]
所述多个臂部具有总共20根以上的所述导电层。
[0039]
[8]一种驱动系统,其特征在于,包括:
[0040]
致动器,执行在相互正交的3个方向上的平移和绕所述3个方向上的轴的旋转中的
至少1个运动,以及
[0041]
根据上述[1]至[7]中任一项所述的柔性布线体,
[0042]
所述致动器具备:
[0043]
基部,其固定在基板;
[0044]
可动部,其安装有所述柔性布线体的所述主体部分和所述半导体装置;以及
[0045]
多个弹簧部,其将所述基部和所述可动部连接。
[0046]
[9]根据上述[8]所述的驱动系统,其特征在于,还包括:
[0047]
至少1个位移传感器,其测量所述可动部和所述多个弹簧部中至少1个的位移。
[0048]
[10]根据上述[8]所述的驱动系统,其特征在于,
[0049]
所述致动器由mems形成。
[0050]
[11]根据上述[8]至[10]中任一项所述的驱动系统,其特征在于,
[0051]
所述致动器是静电致动器。
[0052]
[12]根据上述[8]至[10]中任一项所述的驱动系统,其特征在于,
[0053]
所述致动器是电磁致动器。
[0054]
[13]根据上述[12]所述的驱动系统,其特征在于,
[0055]
所述致动器具备安装在基板的mems,以及设置在所述基板内、与外部电路电连接的至少1个线圈,
[0056]
所述mems具备:
[0057]
基部,其支撑在基板;
[0058]
可动部,其固定在所述柔性布线体的所述主体部分以及所述半导体装置;
[0059]
多个弹簧部,其连接所述基部和所述可动部;以及
[0060]
至少1个磁性体,其安装在所述可动部。
[0061]
[14]根据上述[13]所述的驱动系统,其特征在于,
[0062]
所述磁性体使用磁性粉体或镀敷体而形成,埋入在所述可动部。
[0063]
[15]根据上述[14]所述的驱动系统,其特征在于,
[0064]
所述磁性粉体通过成膜体或树脂粘合剂而相互接合。
[0065]
[16]根据上述[8]至[13]中任一项所述的驱动系统,其特征在于,
[0066]
所述半导体装置是摄像元件。
[0067]
[17]一种摄像装置,其特征在于,
[0068]
具备根据上述[16]所述的驱动系统,
[0069]
所述驱动系统通过驱动所述摄像元件来执行手抖校正和焦点调整中的一方或者双方。
[0070]
发明效果
[0071]
根据本发明,能够提供一种柔性布线体、驱动系统以及摄像装置,其能够使用于高速通信的高频信号和用于驱动摄像元件的大电流这两者稳定地流动,并且能够提高安装于致动器的摄像元件的定位性能,进而不需要繁杂的组装工序,也能够应对大量生产。
附图说明
[0072]
图1是示意性示出了本发明的实施方式所涉及的摄像装置的结构的分解立体图。
[0073]
图2的(a)是示意性示出了图1中驱动系统的结构的俯视图,图2的(b)是沿图2的(a)的i-i’线的剖视图。
[0074]
图3是图2的(b)的局部放大剖视图。
[0075]
图4是图2的(a)中柔性布线体的展开图。
[0076]
图5的(a)是示意性示出了图2的(b)中致动器的结构的底面图,图5的(b)是沿图5的(a)中ii-ii’线的示意性剖视图,图5的(c)是图5的(b)中绝缘部的放大剖视图。
[0077]
图6的(a)是示出了图2的(a)中驱动系统的一个变形例的俯视图,图6的(b)是沿图6的(a)中iii-iii’线的剖视图。
[0078]
图7是图6的(b)的局部放大剖视图。
[0079]
图8是图6的(a)中柔性布线体的展开图。
[0080]
图9是示出了图4中柔性布线体的另一变形例的俯视图。
[0081]
图10的(a)是示出了将图9的柔性布线体装载于致动器的状态的局部俯视图,图10的(b)是图10的(a)的局部剖视图。
[0082]
图11是示出了图4中柔性布线体的另一变形例的俯视图。
[0083]
图12的(a)是示出了将图11的柔性布线体装载于致动器的状态的局部俯视图,图12的(b)是图12的(a)的局部剖视图。
[0084]
图13是示出了图5的致动器的一个变形例的底面图。
[0085]
图14是示出了图5的致动器的另一变形例的底面图。
[0086]
图15是示出了图2的(b)中致动器的一个变形例的剖视图。
具体实施方式
[0087]
以下,参照附图对本发明的实施方式进行详细说明。另外,为了容易理解本发明的特征,以下说明中使用的附图有时出于方便起见而将成为特征的部分放大表示。因此,附图中所描述的各构成要素的尺寸比例等有时与实际不同。
[0088]
图1是示意性示出了本发明的实施方式所涉及的摄像装置的结构的分解立体图。如图1所示,摄像装置1具备透镜2、af单元3、玻璃部件4、罩部件5、半导体装置6以及驱动系统7。摄像装置1没有特别限制,例如是装载于智能手机等移动设备的照相机。半导体装置6例如是摄像元件。在本实施方式中,驱动系统7通过驱动作为摄像元件的半导体装置6来执行手抖校正和焦点调整中的一方或者双方。
[0089]
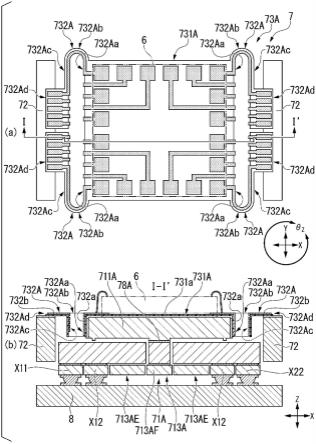
图2的(a)是示意性示出了图1中驱动系统7的结构的俯视图,图2的(b)是沿图2的(a)的i-i’线的剖视图,图3是图2的(b)的局部放大剖视图。
[0090]
驱动系统7具备:致动器71a,其执行在相互正交的3个方向(例如xyz方向)上的平移和绕该3个方向上的轴的旋转中的至少1个运动;以及柔性布线体73a,其连接随致动器71a移动的半导体装置6和位于该半导体装置6外侧的框体72。在本实施方式中,致动器71a执行在相互正交的xyz方向中向x方向和y方向的平移、以及绕z方向上的轴的旋转(θz方向)的运动。
[0091]
柔性布线体73a具有:主体部分731a,其载置有半导体装置6,并与半导体装置6电连接;以及多个臂部732a,其从主体部分731a向框体72延伸,并以三维方式弯曲。在本实施方式中,柔性布线体73a具有4个臂部732a,4个臂部732a例如在俯视图时以通过主体部分
731a的中心并以沿y方向的线为基准而线对称配置。
[0092]
臂部732a以具有与主体部分731a的主面731a相交的主面732a的方式弯曲(图2的(b)),进而折回弯曲(图2的(a)),通过臂部732a的变形来对绕半导体装置6的横向(x方向)、纵向(y方向)及相对于半导体装置6的主面垂直的方向(z方向)上的轴的旋转提供自由度。
[0093]
柔性布线体73a具有4个臂部732a,但不限于此,也可以具有4个以上的臂部732a。另外,优选地,在主体部分731a的俯视图中,多个臂部732a以主体部分731a为基准对称配置,多个臂部732a折回弯曲,由此来维持由弹性变形产生的力平衡的状态。但是,不一定非要是由弹性变形产生的力平衡的状态。也可以是,多个臂部732a以主体部分731a为基准对称配置,多个臂部732a折回弯曲,且在多个臂部732a的任一个都未产生由弹性变形产生的力的状态得以维持。由此,能够减小致动器71a的驱动电力,能够实现节电。
[0094]
具体而言,臂部732a具有:第一部位732aa,其具有相对于主体部分731a的主面731a实质上垂直的主面732a;第二部位732ab,其设置于第一部位732aa的一端,并折回弯曲;第三部位732ac,其与第一部位732aa相对配置;以及第四部位732ad,其设置于第三部位732ac的一端,具有与主体部分731a的主面731a实质上平行的主面732b。第一部位732aa、第二部位732ab以及第三部位732ac相对于主体部分731a的主面731a实质上垂直配置。
[0095]
主体部分731a经由粘接层74a而固定于承载台部711a的上表面711a。另外,臂部732a的第一部位732aa经由粘接层75a固定于承载台部711a的侧面711b,臂部732a的第四部位732ad经由粘接层76a固定于框体72的上表面72a(图3)。主体部分731a随着承载台部711a的向x方向、y方向和/或θz方向的移动而移动,臂部732a的第二部位732ab和第三部位732ac随着主体部分731a的移动而变形。
[0096]
图4是图2的(a)中柔性布线体73a的展开图。在本实施方式中,沿图4中线l1、l1将柔性布线体73a做凸折,并将4个臂部732a各自的中间部折回弯曲,由此形成图2的(a)及图2的(b)所示的三维构造。
[0097]
柔性布线体73a由树脂层733a和在树脂层733a上排列形成、相互绝缘的多个线状导电层734a构成。即,主体部分731a和臂部732a由树脂层733a和在树脂层733a上排列形成、相互绝缘的多个线状导电层734a构成。树脂层733a可以由单层构成,也可以由不同材料制成的多层构成。多个导电层734a可以由单层构成,也可以由不同材料制成的多层构成。导电层734a的一端部734aa经由由金属构成的接合线等接线部77而与半导体装置6电连接,另一端部734ab与未图示的连接器端子电连接(图3)。树脂层733a的厚度例如为10μm~30μm,导电层734a的厚度例如为5μm~15μm。树脂层733a例如由聚酰亚胺(pi)构成,导电层734a例如由铜(cu)构成。在该图中,导电层为1层,但为了进行更复杂的布线,也可以为多层。另外,也可以在导电层上形成绝缘保护膜。而且,在该图中,仅半导体装置6装载于柔性布线体73a,但也可以装载其他元件。
[0098]
优选地,多个臂部732a具有总共20根以上的导电层734a。在本实施方式中,一个臂部732a设置有5根导电层734a,多个臂部732a具有总共20根导电层734a。但是,只要总共设置有20根以上的导电层734a,则臂部的数量和各臂部的导电层的根数或者层数就没有限制,可以根据规格适当变更。由此,能够充分应对由半导体装置6的高功能化等导致的布线的增大。另外,在本实施方式中,俯视图中20根导电层734a的线宽相同,但不限于此,20根导电层734a的线宽也可以不同。例如,多个导电层734a也可以包含用于通信且宽度较窄的导
电层和用于电力且宽度较宽的导电层。由此,在多个导电层734a中,能够设置流过用于高速通信的高频信号的导电层和流过用于驱动摄像元件的大电流的导电层,能够使用于高速通信的高频信号和用于驱动摄像元件的大电流这两者流过柔性布线体73a。
[0099]
柔性布线体73a的形成方法没有特别限制,可以使用对铜层压板的铜箔进行蚀刻而形成电路的减成法、在具有导电层的绝缘基材上通过电镀铜形成电路的半加成法等方法来形成。
[0100]
图5的(a)是示意性示出了图2的(b)中致动器71a的结构的底面图,图5的(b)是沿图5的(a)中ii-ii’线的示意性剖视图,图5的(c)是图5的(b)中绝缘部的放大剖视图。在本实施方式中,致动器71a是静电致动器。
[0101]
致动器71a具有:多个基部712a,其固定于基板8;可动部713a,其经由承载台部711a安装有柔性布线体73a的主体部分731a以及半导体装置6;以及多个弹簧部714a,其将基部712a和可动部713a连接。只要致动器71a具有基部712a、可动部713a以及多个弹簧部714a,则其形式没有限制,但从小型化和制造便利性的观点出发,例如由mems形成。
[0102]
具体而言,多个基部712a具有配置在致动器71a的x方向上一端侧的固定部位x11、x12、gnd14、gnd15、gnd14、θ12,以及配置在致动器71a的x方向上另一端侧的固定部位x21、x22、θ22、gnd23、gnd25、gnd23。固定部位的符号“x”表示使可动部713a沿x方向平移时施加电压的部位,符号“gnd”表示接地部位,符号“θ”表示沿θz方向旋转时施加电压的部位。固定部位x11、x12经由取出电极79a与基板8连接。其他固定部位也是同样的结构,因此省略其说明。
[0103]
2个固定部位x11、x12处形成有梳齿电极中一侧的梳齿,另一侧的梳齿形成于后述的第一可动部713aa。4个固定部位gnd14、gnd14、gnd15、θ12分别经由第一弹簧部714aa与后述的第一可动部713aa连接。另外,2个固定部位x21、x22处分别形成有梳齿电极中一侧的梳齿,另一侧的梳齿形成于后述的第一可动部713ab。4个固定部位θ22、gnd23、gnd25、gnd23分别经由第一弹簧部714aa与后述的第一可动部713ab连接。
[0104]
另外,多个基部712a具有配置在致动器71a的y方向上一端侧的固定部位y11、y12、gnd31、gnd35、gnd31、θ31,并且具有配置在致动器71a的y方向上另一端侧的固定部位y21、y22、θ41、gnd42、gnd45、gnd42。固定部位的符号“y”表示在使可动部713a沿y方向移动时施加电压的部位,符号“gnd”表示接地部位,符号“θ”表示沿θz方向旋转时施加电压的部位。
[0105]
2个固定部位y11、y12处形成有梳齿电极中一侧的梳齿,另一侧的梳齿形成于后述的第一可动部713ac。4个固定部位gnd31、gnd35、gnd31、θ31分别经由第一弹簧部714aa与后述的第一可动部713ac连接。另外,2个固定部位y21、y22处分别形成有梳齿电极中一侧的梳齿,另一侧的梳齿形成于后述的第一可动部713ad。4个固定部位θ22、gnd23、gnd25、gnd23分别经由第一弹簧部714aa与后述的第一可动部713ad连接。
[0106]
可动部713a具有:4个第一可动部713aa、713ab、713ac、713ad,其配置于后述的第二可动部的四方(xy方向);第二可动部713ae,其配置于4个第一可动部713aa~713ad的中央部,经由多个第二弹簧部714ab与4个第一可动部713aa~713ad连接,在俯视图中呈大致十字形;以及第三可动部713af,其配置于第二可动部713ae的中央部,经由多个第三弹簧部714ac与第二可动部713ae连接,在俯视图中呈大致x形状。
[0107]
第一可动部713aa、713ab、713ac、713ad为例如在俯视图中呈大致井字形的框体。
第一可动部713aa的y方向两侧配置有固定部位gnd14、gnd15、gnd14、θ12,第一可动部713aa的内侧配置有固定部位x11、x12。另外,第一可动部713ab的y方向两侧配置有固定部位θ22、gnd23、gnd25、gnd23,第一可动部713ab的内侧配置有固定部位x21、x22。同样,第一可动部713ac的x方向两侧配置有固定部位gnd31、gnd35、gnd31、θ31,第一可动部713ac的内侧配置有固定部位y11、y12。另外,第一可动部713ad的x方向两侧配置有固定部位θ41、gnd42、gnd45、gnd42,第一可动部713ad的内侧配置有固定部位y21、y22。
[0108]
固定部位gnd14、gnd15、gnd14、θ12分别经由第一弹簧部714aa与第一可动部713aa连接。固定部位θ22、gnd23、gnd25、gnd23分别经由第一弹簧部714aa与第一可动部713ab连接。固定部位gnd31、gnd35、gnd31、θ31分别经由第一弹簧部714aa与第一可动部713ac连接。固定部位θ41、gnd42、gnd45、gnd42分别经由第一弹簧部714aa与第一可动部713ad连接。另外,多个第一弹簧部714aa除了作为机械连接部发挥功能以外,还作为电连接部发挥功能。
[0109]
第一可动部713aa处设置有用于使固定部位gnd14与固定部位θ12、gnd15绝缘的绝缘部715aa、715ab。第一可动部713ab处设置有用于使固定部位gnd23与固定部位θ22、gnd25绝缘的绝缘部715ac、715ad。第一可动部713ac处设置有用于使固定部位gnd31与固定部位θ31、gnd35绝缘的绝缘部715ae、715af。第一可动部713ad处设置有用于使固定部位gnd42与固定部位θ41、gnd45绝缘的绝缘部715ag、715ah。上述绝缘部例如由氮化硅(sin)、多晶硅(p-si)等材料制成的1层或多层构成,通过沟槽隔离等形成。
[0110]
在本实施方式中,固定部位x11与固定部位x21是相同电位,固定部位x12与固定部位x22是相同电位。固定部位y11与固定部位y21是相同电位,固定部位y12与固定部位y22是相同电位。当对固定部位x11、x21施加电压时,第一可动部713aa、713ab向x方向的一侧(例如+x方向)移动,当对固定部位x12、x22施加电压时,第一可动部713aa、713ab向x方向的另一侧(例如-x方向)移动。另一方面,当对固定部位y11、y21施加电压时,第一可动部713ac、713ad向y方向的一侧(例如+y方向)移动,当对固定部位y12、y22施加电压时,第一可动部713ac、713ad向y方向的另一侧(例如-y方向)移动。
[0111]
第二可动部713ae是例如在俯视图中具有大致十字形的轮廓的框状体,经由8个第二弹簧部714ab与4个第一可动部713aa、713ab、713ac、713ad连接。第二可动部713ae的x方向一端侧配置有2个第二弹簧部714ab,其另一端侧也配置有2个第二弹簧部714ab。另外,第二可动部713ae的y方向一端侧配置有2个第二弹簧部714ab,其另一端侧也配置有2个第二弹簧部714ab。第二弹簧部714ab被设计成使第二可动部713ae沿一个方向(x方向和y方向中的任一个)移动。
[0112]
第二可动部713ae处形成有构成多个梳齿电极的一侧的多个梳齿,第三可动部713af处形成有构成多个梳齿电极的另一侧的多个梳齿。在本实施方式中,4个梳齿电极被配置在第二可动部713ae与第三可动部713af之间,以第三可动部713af的中心为基准180
°
旋转对称。
[0113]
另外,第二可动部713ae具有以围绕第三可动部713af的方式设置的6个移动部位θ51、θ52、gnd55、θ61、θ62、gnd65。移动部位θ51、θ52、gnd55、θ61、θ62、gnd65被配置为以第三可动部713af的中心为基准180
°
旋转对称。移动部位的符号“gnd”表示接地部位,符号“θ”表示沿θz方向旋转时被施加电压的部位。
[0114]
移动部位θ51经由第二弹簧部714ab和第一弹簧部714aa与固定部位θ31连接。移动
部位θ52经由第二弹簧部714ab和第一弹簧部714aa与固定部位θ22连接。移动部位gnd55经由第二弹簧部714ab和第一弹簧部714aa分别与固定部位gnd15、gnd35连接。移动部位θ61经由第二弹簧部714ab和第一弹簧部714aa与固定部位θ41连接。移动部位θ62经由第二弹簧部714ab和第一弹簧部714aa与固定部位θ12连接。移动部位gnd65经由第二弹簧部714ab和第一弹簧部714aa分别与固定部位gnd25、gnd45连接。另外,多个第二弹簧部714ab和第一弹簧部714aa除了作为机械连接部发挥功能以外,还作为电连接部发挥功能。
[0115]
另外,6个移动部位θ51、θ52、gnd55、θ61、θ62、gnd65中的相邻移动部位之间,设置有绝缘部716aa、716ab、716ac、716ad、716ae、716af。上述绝缘部例如由sin、p-si等材料制成的1层或多层构成,通过沟槽隔离等形成。在本实施方式中,如图5的(c)所示,绝缘部716ab具有由sin制成的第一层716aba和由p-si制成的第二层716abb。绝缘部716aa、716ac~716af是与绝缘部716ab同样的结构,因此省略其说明。
[0116]
第三可动部713af是例如在俯视图中呈大致x形状的框状体,经由多个第三弹簧部714ac与第二可动部713ae连接。多个第三弹簧部714ac除了作为机械连接部发挥功能以外,还作为电连接部发挥功能。第三可动部713af的x方向一端侧配置有第三弹簧部714ac,其另一端侧也配置有第三弹簧部714ac。另外,第三可动部713af的y方向一端侧配置有第三弹簧部714ac,其另一端侧也配置有第三弹簧部714ac。在本实施方式中,4个第三弹簧部714ac以相当于将第三可动部713af的中心作为原点的y=x或y=-x的线为基准呈线对称配置。第三可动部713af经由粘接层78a固定于承载台部711a(图2的(b))。
[0117]
在本实施方式中,移动部位θ51与固定部位θ31为相同电位,移动部位θ52与固定部位θ22为相同电位。移动部位θ61与固定部位θ41为相同电位,移动部位θ62与固定部位θ12为相同电位。另外,移动部位gnd55、gnd65与固定部位gnd35、gnd45为相同电位。并且,当对移动部位θ51、θ61施加相同电压时,第三可动部713af向θz方向的一侧(例如顺时针)移动,当对移动部位θ52、θ62施加相同电压时,第三可动部713af向θz方向的另一侧(例如逆时针)移动。
[0118]
通过如上所述对规定的固定部位和/或移动部位施加电压,第一可动部713aa~713ad和第二可动部713ae在x方向和/或y方向平移,第三可动部713af在θz方向上旋转。因此,第三可动部713af在x方向、y方向和/或θz方向上移动。承载台部711a随着第三可动部713af的移动而在x方向、y方向和/或θz方向上移动,柔性布线体73a的主体部分731a随着承载台部711a的移动而在x方向、y方向和/或θz方向上移动。柔性布线体73a的多个臂部732a容易随着主体部分731a的移动而变形,并跟随其移动。
[0119]
致动器71a的形成方法没有特别限制,例如可以通过使用在氧化膜的两面形成有硅单晶的soi等基板,对处理层和活性层实施深反应离子刻蚀(drie)等蚀刻加工而形成。另外,致动器71a内的上述绝缘部能够通过组合drie、lpcvd、研磨等而形成。
[0120]
驱动系统7也可以具备对上述可动部以及上述多个弹簧部中至少1个的位移进行测量的至少1个位移传感器。例如,驱动系统7为了测量第三可动部713af的位移,可以使用驱动用梳齿电极,也可以进一步具备其他位移传感器。通过将来自位移传感器的信号输入到未图示的控制部,并基于该信号控制致动器71a的驱动,能够实现半导体装置6的更高精度的位置控制。
[0121]
如上所述,根据本实施方式,柔性布线体73a具有:主体部分731a,其载置有半导体
装置6,并与半导体装置6电连接;以及多个臂部732a,其从主体部分731a向框体72延伸,并以三维方式弯曲。因此与主体部分731a一体成形的多个臂部732a的主面732a相对于主体部分731a的主面731a不平行,多个臂部732a相对于固定于承载台部711a的主体部分731a的平移(x方向和/或y方向)和旋转(θz方向)在面外方向上容易且充分地弯曲,由此致动器71a的移动难以受到阻碍。其结果是,能够提高载置于主体部分731a上的半导体装置6的定位性能。另外,通过在臂部732a设置用于通信的导电层和用于电力的导电层,能够使用于高速通信的高频信号和用于驱动摄像元件的大电流这两者稳定地流动。此外,能够通过对柔性布线体73a的展开体实施简单的弯曲加工而形成柔性布线体73a,因此不需要繁杂的组装工序,也能够应对大量生产。
[0122]
另外,在主体部分731a的俯视图中,多个臂部732a以主体部分731a为基准对称配置,多个臂部732a折回弯曲,由此来维持由弹性变形产生的力平衡的状态,因此由柔性布线体73a的刚性所引起的阻力变小,所以在致动器71a由mems等形成、产生力小的情况下,致动器71a的移动难以受到阻碍,能够实现半导体装置6的高精度的移动。
[0123]
而且,臂部732a的具有相对于主体部分731a的主面731a实质上垂直的主面732a的第一部位732aa、设置于第一部位732aa的一端且折回弯曲的第二部位732ab、以及与第一部位732aa相对配置的第三部位732ac相对于主体部分731a的主面731a实质上垂直配置,因此多个臂部732a能够可靠地跟随固定于承载台部711a的主体部分731a的平移(x方向和/或y方向)和旋转(θz方向),能够进一步提高载置于主体部分731a上的半导体装置6的定位性能,并且能够提高连接可靠性。
[0124]
另外,根据本实施方式,致动器71a上形成有多个绝缘部715aa~715af、716aa~716af,分别电独立地设置有执行向x方向的平移的驱动机构以及电路、执行向y方向的平移的驱动机构以及电路、以及用于执行θz方向上的旋转的驱动机构以及电路,因此能够实现向x方向、y方向以及/或者θz方向的任意移动。另外,由于致动器71a的驱动电路与基板8的未图示的电路连接,因此能够将致动器71a的布线与半导体装置6的布线(柔性布线体73a的导电层)以承载台部711a为基准上下分开地形成,能够可靠地防止这些布线的物理干涉。另外,通过将致动器71a中多个基部712a和基板8进行倒装芯片连接,能够保护致动器71a的可动部713a的微细部分。
[0125]
图6的(a)是示出了图2的(a)中驱动系统7的一个变形例的俯视图,图6的(b)是沿图6的(a)中iii-iii’线的剖视图,图7是图6的(b)的局部放大剖视图。和图2的(a)中驱动系统7的结构上的不同点主要在于,图6的(a)中驱动系统不具有承载台部711a,致动器71a经由粘接层80a与柔性布线体73a直接连接。对于与图2的(a)中驱动系统7相同的结构,标注相同的附图标记并省略其说明。
[0126]
图6的(a)的柔性布线体73a在展开体的状态下具有与图2的(a)的柔性布线体73a相同的结构,在通过加工形成了三维构造的状态下具有与图2的(a)的柔性布线体73a不同的结构。如图6的(b)所示,柔性布线体73a具有由主体部分731a和臂部732a限定且收容半导体装置6的收容部81a。如图7所示,主体部分731a经由粘接层82a固定于半导体装置6的下表面6a。臂部732a的第一部位732aa经由粘接层83a固定于半导体装置6的侧面6b(图7)。另外,导电层734a的一端部734aa经由通过超声波连接、热压接、使用导电性粘接材料的连接等形成的接合部84a与半导体装置6电连接,另一端部734ab与未图示的连接器端子电连接。
[0127]
图8是图6的(a)中柔性布线体73a的展开图。在本变形例中,沿图8中线l2、l2将柔性布线体73a做凸折,并将4个臂部732a各自的中间部折回弯曲,由此形成图6的(a)及图6的(b)所示的三维构造。
[0128]
这样,根据本变形例,在不具备承载台部711a的驱动系统7中也能够应用柔性布线体73a。也就是说,柔性布线体73a具有:主体部分731a,其载置有半导体装置6,并与半导体装置6电连接;以及多个臂部732a,其从主体部分731a向框体72延伸,并以三维方式弯曲。因此与主体部分731a一体成形的多个臂部732a的主面732a相对于主体部分731a的主面731a不平行,多个臂部732a相对于固定于承载台部711a的主体部分731a的平移(x方向和/或y方向)和旋转(θz方向)在面外方向上容易且充分地弯曲,由此致动器71a的移动难以受到阻碍。其结果是,能够提高载置于主体部分731a上的半导体装置6的定位性能。另外,由于不设置接线部而设置接合部84a来将半导体装置6与柔性布线体73a电连接,因此能够有助于将半导体元件6以及驱动系统7组合形成的结构的低高度化。
[0129]
图9是示出了图4中柔性布线体的另一变形例的俯视图。图10的(a)是示出了将图9的柔性布线体装载于致动器的状态的局部俯视图,图10的(b)是图10的(a)的局部剖视图。图9的柔性布线体与图4的柔性布线体在结构上的不同点在于,臂部的形状不同。
[0130]
如图9所示,柔性布线体73b具有:主体部分731b,其载置有半导体装置6,并与半导体装置6电连接;以及多个臂部732b,其从主体部分731b向框体72(参照图2的(a)以及图2的(b))延伸,并以三维方式弯曲。
[0131]
如图10的(a)及图10的(b)所示,臂部732b具有:第一部位732ba,其具有相对于主体部分731b的主面731b实质上垂直的主面732c;第二部位732bb,其设置于第一部位732ba的一端,并折回弯曲;第三部位732bc,其与第一部位732ba相对配置;以及第四部位732bd,其设置于第三部位732bc的一端,具有与主体部分731b的主面731b实质上平行的主面732d。第一部位732ba、第二部位732bb以及第三部位732bc相对于主体部分731b的主面731b实质上垂直配置(图10的(b))。
[0132]
第四部位732bd具有:延伸部732bda,其相对于第三部位732bc垂直配置;以及延伸部732bdb,其相对于延伸部732bda垂直配置(图9)。在将柔性布线体73b装载于致动器71a的状态下(图10的(a)),在俯视图中延伸部732bda沿远离主体部分731b的方向(x方向)延伸,延伸部732bdb从延伸部732bda沿横向(y方向)延伸。设置于相邻2个臂部732b的2个延伸部732bdb沿横向(y方向)延伸的同时,向彼此远离的方向延伸。另外,在本变形例中,第四部位732bd设置在与主体部分731b不同的平面上,并配置在主体部分731b的下方。
[0133]
在本变形例中,延伸部732bdb处设置有导电层734b的另一端部734bb,导电层734b的一端部734ba与半导体装置6电连接,另一端部734bb与未图示的连接器端子电连接。另外,在柔性布线体73b以三维方式弯曲的状态下,导电层734b的另一端部734bb在z方向上配置于树脂层733b的下侧(背侧)(图10的(b))。
[0134]
臂部732b也可以在主体部分731b与第一部位732ba之间具有在折弯时成为冗余部的第五部位732be(图9)。另外,优选地,第五部位732be的宽度方向(y方向)尺寸小于主体部分731b的宽度方向尺寸。由此,容易通过弯曲加工来形成第一部位732ba,另外,能够抑制被折弯部分处的导电层734b的压曲,能够进一步提高导电层734b的电连接可靠性。
[0135]
根据本变形例,第四部位732bd具有:延伸部732bda,其相对于第三部位732bc垂直
配置;以及延伸部732bdb,其相对于延伸部732bda垂直配置,因此能够提高插入到连接器端子的第四部位732bd的设计自由度。
[0136]
图11是示出了图4中柔性布线体的另一变形例的俯视图。图12的(a)是示出了将图11的柔性布线体装载于致动器的状态的局部俯视图,图12的(b)是图12的(a)的局部剖视图。
[0137]
如图11所示,柔性布线体73c具有:主体部分731c,其载置有半导体装置6,并与半导体装置6电连接;以及多个臂部732c,其从主体部分731c向框体72(参照图2的(a)以及图2的(b))延伸,并以三维方式弯曲。
[0138]
如图12的(a)以及图12的(b)所示,臂部732c具有:第一部位732ca,其具有相对于主体部分731c的主面731c实质上垂直的主面732e;第二部位732cb,其设置于第一部位732ca的一端,并折回弯曲;第三部位732cc,其与第一部位732ca相对配置;以及第四部位732cd,其设置于第三部位732cc的一端,具有与主体部分731c的主面731c实质上平行的主面732f。第一部位732ca、第二部位732cb以及第三部位732cc相对于主体部分731c的主面731c实质上垂直配置。(图10的(b))。
[0139]
第四部位732cd具有:延伸部732cda,其相对于第三部位732cc垂直配置;以及延伸部732cdb,其相对于延伸部732cda垂直配置(图11)。在将柔性布线体73c装载于致动器71a的状态下(图12的(a)),在俯视图中延伸部732cda沿远离主体部分731c的方向(x方向)延伸,延伸部732cdb从延伸部732cda沿横向(y方向)延伸。设置于相邻2个臂部732c的2个延伸部732cdb沿横向(y方向)延伸的同时,向彼此远离的方向延伸。另外,在本变形例中,第四部位732cd设置在与主体部分731c相同的平面上。
[0140]
此外,在本变形例中,延伸部732cdb处设置有导电层734c的另一端部734cb,导电层734c的一端部734ca与半导体装置6电连接,另一端部734cb与未图示的连接器端子电连接。另外,在柔性布线体73c以三维方式弯曲的状态下,导电层734c的另一端部734cb在z方向上配置于树脂层733c的上侧(表侧)(图12的(b))。
[0141]
根据本变形例,第四部位732cd具有:延伸部732cda,其相对于第三部位732cc垂直配置;以及延伸部732cdb,其相对于延伸部732cda垂直配置,因此与柔性布线体73b的第四部位732bd同样能够提高插入到连接器端子的第四部位732cd的设计自由度。
[0142]
图13是示出了图5的致动器71a的一个变形例的底面图。
[0143]
如图13所示,致动器71b具有固定于基板8(参照图2的(b))的多个基部712b、安装有柔性布线体73a的主体部分731a以及半导体装置6的可动部713b、以及连接基部712b与可动部713b的多个弹簧部714b。与致动器71a相同,致动器71b例如由mems形成。
[0144]
多个基部712b具有配置在致动器71b的x方向上一端侧的固定部位x31、x32、gnd51、gnd51,以及配置在致动器71b的x方向上另一端侧的固定部位x41、x42、gnd51、gnd51。固定部位x31、x32经由未图示的取出电极与基板8连接(参照图5的(b))。其他固定部位也是同样的结构,因此省略其说明。
[0145]
2个固定部位x31、x32处形成有梳齿电极中一侧的梳齿,另一侧的梳齿形成于后述的第一可动部713ba。2个固定部位gnd51、gnd51分别经由第一弹簧部714ba与后述的第一可动部713ba连接。另外,2个固定部位x41、x42处分别形成有梳齿电极中一侧的梳齿,另一侧的梳齿形成于后述的第一可动部713bb。2个固定部位gnd51、gnd51分别经由第一弹簧部
714ba与后述的第一可动部713bb连接。
[0146]
另外,多个基部712b具有配置在致动器71b的y方向上一端侧的固定部位y31、y32、gnd51、gnd51,并且具有配置在致动器71b的y方向上另一端侧的固定部位y41、y42、gnd51、gnd51。
[0147]
2个固定部位y31、y32处形成有梳齿电极中一侧的梳齿,另一侧的梳齿形成于后述的第一可动部713bc。2个固定部位gnd51、gnd51分别经由第一弹簧部714ba与后述的第一可动部713bc连接。另外,2个固定部位y41、y42处分别形成有梳齿电极中一侧的梳齿,另一侧的梳齿形成于后述的第一可动部713bd。2个固定部位gnd51、gnd51分别经由第一弹簧部714ba与后述的第一可动部713bd连接。
[0148]
可动部713b具有:4个第一可动部713ba、713bb、713bc、713bd,其配置于后述的第二可动部的四方(xy方向),以及第二可动部713be,其配置于4个第一可动部713ba~713bd的中央部,经由多个第二弹簧部714bb与4个第一可动部713ba~713bd连接,在俯视图中呈大致风车形。
[0149]
第一可动部713ba、713bb、713bc、713bd是例如在俯视图中呈大致井字形的框体。第一可动部713ba的y方向两侧配置有固定部位gnd51、gnd51,第一可动部713ba的内侧配置有固定部位x31、x32。同样地,第一可动部713bb的y方向两侧配置有固定部位gnd51、gnd51,第一可动部713bb的内侧配置有固定部位x41、x42。
[0150]
另外,第一可动部713bc的x方向两侧配置有固定部位gnd51、gnd51,第一可动部713bc的内侧配置有固定部位y31、y32。此外,第一可动部713bd的x方向两侧配置有固定部位gnd51、gnd51,第一可动部713bd的内侧配置有固定部位y41、y42。
[0151]
多个固定部位gnd51分别经由第一弹簧部714ba与第一可动部713ba~713bd连接。另外,多个第一弹簧部714ba除了作为机械连接部发挥功能以外,还作为电连接部发挥功能。
[0152]
在本变形例中,通过对固定部位x31、x32、x41、x42、y31、y32、y41、y42施加任意电压,第一可动部713ba、713bb、713bc、713bd独立移动,第二可动部713be在x、y、θz方向上移动。例如,如果对固定部位x32和x41施加相同电压,则第一可动部713ba和713bb在x方向上(向右)相等地移动,第二可动部713be在+x方向上(向右)移动。另外,如果对固定部位x32、x42、y32、y42施加相同电压,则第一可动部713ba、713bb、713bc、713bd朝中心方向相等地移动,第二可动部713be在θz方向上(顺时针)旋转。
[0153]
第二可动部713be经由8个第二弹簧部714bb与4个第一可动部713ba、713bb、713bc、713bd连接。第二可动部713be的x方向一端侧配置有2个第二弹簧部714bb,其另一端侧也配置有2个第二弹簧部714bb。另外,第二可动部713be的y方向一端侧配置有2个第二弹簧部714bb,其另一端侧也配置有2个第二弹簧部714bb。通过适当地设计第二弹簧部714bb,第一可动部713ba和713bb能够仅在x方向上移动,第一可动部713bc和713bd能够仅在y方向上移动。第二可动部713be经由粘接层78a被固定于承载台部711a(参照图2的(b))。
[0154]
根据本变形例,执行向x方向的平移的驱动机构以及电路和执行向y方向的平移的驱动机构以及电路分别独立地设置,此外,因为还通过控制向x方向的上述平移和向y方向的上述平移来执行θz方向的旋转,因此能够实现第二可动部713be的向x方向、y方向及/或θz方向的移动。
[0155]
图14是示出了图5的致动器71a的另一变形例的底面图。
[0156]
如图14所示,致动器71c具有:固定于基板8(参照图2的(b))的多个基部712c、安装有柔性布线体73a的主体部分731a以及半导体装置6的可动部713c、以及连接基部712c与可动部713c的多个弹簧部714c。与致动器71a相同,致动器71c例如由mems形成。
[0157]
多个基部712c具有配置在致动器71c的x方向上一端侧的固定部位x51、x52、gnd61、x61、x62、gnd61,以及配置在致动器71c的x方向上另一端侧的固定部位x71、x72、gnd61、x81、x82、gnd61。固定部位x51、x52经由未图示的取出电极与基板8连接(参照图5的(b))。其他固定部位也是同样的结构,因此省略其说明。
[0158]
2个固定部位x51、x52处形成有梳齿电极中一侧的梳齿,另一侧的梳齿形成于后述的第一可动部713caa。同样地,2个固定部位x61、x62处形成有梳齿电极中一侧的梳齿,另一侧的梳齿形成于后述的第一可动部713cab。2个固定部位gnd61、gnd61分别经由2个第一弹簧部714ca与后述的第一可动部713caa、第一可动部713cab连接。
[0159]
另外,2个固定部位x71、x72处形成有梳齿电极中一侧的梳齿,另一侧的梳齿形成于后述的第一可动部713cba。同样地,2个固定部位x81、x82处形成有梳齿电极中一侧的梳齿,另一侧的梳齿形成于后述的第一可动部713cbb。2个固定部位gnd61、gnd61分别经由2个第一弹簧部714ca与后述的第一可动部713cba、第一可动部713cbb连接。
[0160]
另外,多个基部712c具有配置在致动器71c的y方向上一端侧的固定部位y51、y52、gnd61、y61、y62、gnd61,以及配置在致动器71c的y方向上另一端侧的固定部位y71、y72、gnd61、y81、y82、gnd61。
[0161]
2个固定部位y51、y52处形成有梳齿电极中一侧的梳齿,另一侧的梳齿形成于后述的第一可动部713cca。同样地,2个固定部位y61、y62处形成有梳齿电极中一侧的梳齿,另一侧的梳齿形成于后述的第一可动部713ccb。2个固定部位gnd61、gnd61分别经由2个第一弹簧部714ca与后述的第一可动部713cca、第一可动部713ccb连接。
[0162]
另外,2个固定部位y71、y72处形成有梳齿电极中一侧的梳齿,另一侧的梳齿形成于后述的第一可动部713cda。同样地,2个固定部位y81、y82处形成有梳齿电极中一侧的梳齿,另一侧的梳齿形成于后述的第一可动部713cdb。2个固定部位gnd61、gnd61分别经由2个第一弹簧部714ca与后述的第一可动部713cda、第一可动部713cdb连接。
[0163]
可动部713c具有:8个第一可动部713caa、713cab、713cba、713cbb、713cca、713ccb、713cda、713cdb,其配置于后述的第二可动部的四方(xy方向),以及第二可动部713ce,其配置于8个第一可动部713caa~713cdb的中央部,经由多个第二弹簧部714cb与8个第一可动部713caa~713cdb连接,在俯视图中呈大致矩形。
[0164]
第一可动部713caa、713cab、713cba、713cbb、713cca、713ccb、713cda、713cdb是例如在俯视图中呈大致矩形的框体。第一可动部713caa的x方向上与第二可动部713ce相反的一侧配置有固定部位x51,第一可动部713caa的内侧配置有固定部位x52、gnd61。另外,第一可动部713cab的x方向上与第二可动部713ce相反的一侧配置有固定部位x61,第一可动部713cab的内侧配置有固定部位x62、gnd61。
[0165]
而且,第一可动部713cba的x方向上与第二可动部713ce相反的一侧配置有固定部位x71,第一可动部713cba的内侧配置有固定部位x72、gnd61。此外,第一可动部713cbb的x方向上与第二可动部713ce相反的一侧配置有固定部位x81,第一可动部713cbb的内侧配置
有固定部位x82、gnd61。
[0166]
同样地,第一可动部713cca的y方向上与第二可动部713ce相反的一侧配置有固定部位y52,第一可动部713cca的内侧配置有固定部位y51、gnd61。另外,第一可动部713ccb的y方向上与第二可动部713ce相反的一侧配置有固定部位x62,第一可动部713ccb的内侧配置有固定部位y61、gnd61。
[0167]
而且,第一可动部713cda的y方向上与第二可动部713ce相反的一侧配置有固定部位y72,第一可动部713cda的内侧配置有固定部位y71、gnd61。此外,第一可动部713cdb的y方向上与第二可动部713ce相反的一侧配置有固定部位y82,第一可动部713cdb的内侧配置有固定部位y81、gnd61。
[0168]
多个固定部位gnd61分别经由第一弹簧部714ca与第一可动部713caa~713cdb连接。另外,多个第一弹簧部714ca除了作为机械连接部发挥功能以外,还作为电连接部发挥功能。
[0169]
在本变形例中,当对固定部位x52、x62、x71、x81施加电压时,第一可动部713caa、713cab、713cba、713cbb向x方向的一侧(例如+x方向)移动,当对固定部位x51、x61、x72、x82施加电压时,第一可动部713caa、713cab、713cba、713cbb向x方向的另一侧(例如-x方向)移动。另一方面,当对固定部位y52、y62、y71、y81施加电压时,第一可动部713bc、713bd向y方向的一侧(例如+y方向)移动,当对固定部位y51、y61、y72、y82施加电压时,第一可动部713bc、713bd向y方向的另一侧(例如-y方向)移动。
[0170]
第二可动部713ce经由8个第二弹簧部714cb与8个第一可动部713caa、713cab、713cba、713cbb、713cca、713ccb、713cda、713cdb连接。第二可动部713ce的x方向一端侧配置有2个第二弹簧部714cb,其另一端侧也配置有2个第二弹簧部714cb。另外,第二可动部713be的y方向一端侧配置有2个第二弹簧部714cb,其另一端侧也配置有2个第二弹簧部714cb。第二可动部713ce经由粘接层78a被固定于承载台部711a(参照图2的(b))。
[0171]
在本变形例中,第二可动部713ce与固定部位gnd61为相同电位。例如,当对固定部位x52、x62、x71、x81以及固定部位x51、x61、x72、x82中的一个和固定部位y52、y62、y71、y81以及固定部位y51、y61、y72、y82中的一个施加电压时,第一可动部713caa、713cab、713cba、713cbb向x方向的一侧(例如+x方向)移动的同时,第一可动部713cca、713ccb、713cda、713cdb向y方向的一侧(例如+y方向)移动。并且,随着第一可动部713caa~713cdb的移动,第二可动部713ce在x、y、θz方向移动。例如,如果对固定部位x52、x62、x71、x81施加相同电压,则第一可动部713caa、713cab、713cba、713cbb向+x方向(向右)相等地移动,第二可动部713ce向+x方向(向右)移动。另外,如果对固定部位x52、x61、x71、x82、y52、y61、y71、y82施加相同电压,则第一可动部713caa和713cba向+x方向移动,第一可动部713cab和713cbb向-x方向移动,第一可动部713cca和713cda向+y方向(向上)移动,第一可动部713cbb和713cdb向-y方向移动,第二可动部713ce在θz方向(顺时针)移动。
[0172]
如上所述,通过对规定的固定部位选择性地施加电压,第一可动部713caa~713cdb在x方向和/或y方向上平移的同时,第二可动部713be在x、y、θz方向上移动。
[0173]
根据本变形例,执行向x方向的平移的驱动机构以及电路和执行向y方向的平移的驱动机构以及电路分别独立设置,此外还通过控制向x方向的上述平移和向y方向的上述平移来执行θz方向上的旋转,因此能够实现第二可动部713ce的向x方向、y方向及/或θz方向
的移动。
[0174]
图15是示出了图2的(b)的致动器71a的一个变形例的剖视图。本变形例在致动器为电磁致动器这一点上与致动器71a不同。
[0175]
如图15所示,致动器71d具有安装于基板8的mems711d和设置于基板8内且与未图示的外部电路电连接的多个线圈712d。mems711d具有支承于基板8的基部711da、固定于柔性布线体73a的主体部分731a以及半导体装置6的可动部711db、连接基部711da与可动部711db的多个弹簧部711dc、以及安装于可动部711db的多个磁性体711dd。
[0176]
多个线圈712d配置在位于mems711d的正下方、且与多个磁性体711dd对应的位置,例如埋入印刷电路板、陶瓷基板等基板8。由于mems711d的基部711da、可动部711db以及多个弹簧部711dc的结构与上述致动器的基部、可动部以及多个弹簧部的结构基本相同,因此省略其说明。
[0177]
磁性体711dd使用例如钕磁铁等磁性粉体形成,埋入可动部711db。磁性体711dd通过例如在soi等基板上利用drie形成孔,在孔的内部装入磁性粉体的状态下通过成膜将该磁性粉体固定在孔中而得到。磁性粉体通过成膜体彼此结合,成膜体例如由氧化铝(al2o3)构成,通过ald形成。或者,磁性粉体通过树脂粘合剂而彼此结合。另外,除了埋入磁性粉体,也可以通过镀敷在所述孔中形成磁性体(例如copt)。由此,能够增大相对于soi等基板的厚度的磁性体711dd的厚度,能够在可动部711db处形成高磁力的磁性体711dd。
[0178]
致动器71d也可以具备至少1个位移传感器,其测量可动部711db以及多个弹簧部711dc中至少1个的位移。例如,能够在mems711d上形成位移传感器及其电路。
[0179]
根据本变形例,能够利用作为电磁致动器的致动器71d使可动部711db在x方向、y方向和/或θz方向上移动,与静电致动器同样能够实现半导体装置6的高精度移动。
[0180]
以上,虽然对本发明的实施方式进行了详细叙述,但是本发明并不局限于上述实施方式,在权利要求书所记载的本发明的主旨的范围内,能够进行各种变形与变更。
[0181]
例如,在本实施方式中,致动器71a执行在相互正交的xyz方向中向x方向和y方向的平移、以及绕z方向上的轴的旋转(θz方向)的运动,但不限于此,也可以进行在相互正交的xyz方向中向x方向、y方向和z方向的平移、以及绕x方向上的轴的旋转(θx方向)、绕y方向上的轴的旋转(θy方向)和绕z方向上的轴的旋转(θz方向)的运动中的至少1个运动。在这样的致动器中使用具有与上述相同的结构的柔性布线体的情况下,多个臂部能够跟随在相互正交的3个方向上的平移以及绕该3个方向上的轴的旋转中的至少1个运动,能够提高载置于主体部分上的半导体装置的定位性能,此外,还能够使用于高速通信的高频信号和用于驱动摄像元件的大电流这两者稳定地流动。
[0182]
附图标记说明
[0183]
1 摄像装置
[0184]
2 透镜
[0185]
3 af单元
[0186]
4 玻璃部件
[0187]
5 罩部件
[0188]
6 半导体装置
[0189]
6a 下表面
[0190]
6b 侧面
[0191]
7 驱动系统
[0192]
8 基板
[0193]
71a 致动器
[0194]
71b 致动器
[0195]
71c 致动器
[0196]
71d 致动器
[0197]
72 框体
[0198]
72a 上表面
[0199]
73a 柔性布线体
[0200]
73b 柔性布线体
[0201]
73c 柔性布线体
[0202]
74a 粘接层
[0203]
75a 粘接层
[0204]
76a 粘接层
[0205]
77 接线部
[0206]
78a 粘接层
[0207]
79a 取出电极
[0208]
80a 粘接层
[0209]
81a 收容部
[0210]
82a 粘接层
[0211]
83a 粘接层
[0212]
84a 接合部
[0213]
711a 上表面
[0214]
711a 承载台部
[0215]
711b 侧面
[0216]
711da 基部
[0217]
711db 可动部
[0218]
711dc 多个弹簧部
[0219]
711dd 磁性体
[0220]
712a 基部
[0221]
712b 基部
[0222]
712c 基部
[0223]
712d 线圈
[0224]
713a 可动部
[0225]
713aa 第一可动部
[0226]
713ab 第一可动部
[0227]
713ac 第一可动部
[0228]
713ad 第一可动部
[0229]
713ae 第二可动部
[0230]
713af 第三可动部
[0231]
713b 可动部
[0232]
713ba 第一可动部
[0233]
713bb 第一可动部
[0234]
713bc 第一可动部
[0235]
713bd 第一可动部
[0236]
713be 第二可动部
[0237]
713c 可动部
[0238]
713caa 第一可动部
[0239]
713cab 第一可动部
[0240]
713cba 第一可动部
[0241]
713cbb 第一可动部
[0242]
713cca 第一可动部
[0243]
713ccb 第一可动部
[0244]
713cda 第一可动部
[0245]
713cdb 第一可动部
[0246]
713ce 第二可动部
[0247]
714a 多个弹簧部
[0248]
714aa 第一弹簧部
[0249]
714ab 第二弹簧部
[0250]
714ac 第三弹簧部
[0251]
714b 多个弹簧部
[0252]
714ba 第一弹簧部
[0253]
714bb 第二弹簧部
[0254]
714c 多个弹簧部
[0255]
714ca 第一弹簧部
[0256]
714cb 第二弹簧部
[0257]
715aa 绝缘部
[0258]
715ab 绝缘部
[0259]
715ac 绝缘部
[0260]
715ad 绝缘部
[0261]
715ae 绝缘部
[0262]
715af 绝缘部
[0263]
715ag 绝缘部
[0264]
715ah 绝缘部
[0265]
716aa 绝缘部
[0266]
716ab 绝缘部
[0267]
716aba 第一层
[0268]
716abb 第二层
[0269]
716ac 绝缘部
[0270]
716ad 绝缘部
[0271]
716ae 绝缘部
[0272]
716af 绝缘部
[0273]
731a 主面
[0274]
731a 主体部分
[0275]
731b 主面
[0276]
731b 主体部分
[0277]
731c 主体部分
[0278]
731c 主面
[0279]
732a 主面
[0280]
732a 臂部
[0281]
732aa 第一部位
[0282]
732ab 第二部位
[0283]
732ac 第三部位
[0284]
732ad 第四部位
[0285]
732b 主面
[0286]
732b 臂部
[0287]
732ba 第一部位
[0288]
732bb 第二部位
[0289]
732bc 第三部位
[0290]
732bd 第四部位
[0291]
732bda 延伸部
[0292]
732bdb 延伸部
[0293]
732be 第五部位
[0294]
732c 主面
[0295]
732c 臂部
[0296]
732ca 第一部位
[0297]
732cb 第二部位
[0298]
732cc 第三部位
[0299]
732cd 第四部位
[0300]
732cda 延伸部
[0301]
732cdb 延伸部
[0302]
732d 主面
[0303]
732e 主面
[0304]
732f 主面
[0305]
733a 树脂层
[0306]
733b 树脂层
[0307]
733c 树脂层
[0308]
734a 导电层
[0309]
734aa 一端部
[0310]
734ab 另一端部
[0311]
734b 导电层
[0312]
734ba 一端部
[0313]
734bb 另一端部
[0314]
734c 导电层
[0315]
734ca 一端部
[0316]
734cb 另一端部
[0317]
x11、x12、gnd14、gnd15、θ12 固定部位
[0318]
x21、x22、θ22、gnd23、gnd25 固定部位
[0319]
y11、y12、gnd31、gnd35、θ31 固定部位
[0320]
y21、y22、θ41、gnd42、gnd45 固定部位
[0321]
x31、x32、gnd51 固定部位
[0322]
x41、x42、gnd51 固定部位
[0323]
y31、y32、gnd51 固定部位
[0324]
y41、y42、gnd51 固定部位
[0325]
x51、x52、gnd61、x61、x6 2固定部位
[0326]
x71、x72、gnd61、x81、x82 固定部位
[0327]
y51、y52、gnd61、y61、y62 固定部位
[0328]
y71、y72、gnd61、y81、y82 固定部位
[0329]
θ51、θ52、gnd55、θ61、θ62、gnd65 移动部位
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1