基于近场光的纳米尺度成像系统、三维成像方法和装置
本文涉及微观检测,尤其是一种基于近场光的纳米尺度成像系统、三维成像方法和装置。
背景技术:
1、纳米与生物技术是当下发展最为迅猛的科学领域之一,其应用广泛,包括1至1000纳米尺度内的成像、测量、加工和操纵等等。对诸如抗体、病毒等这些微小问题的研究迫切地需要高分辨率显微成像技术的支持,但由于衍射极限的存在,传统的宽场光学显微镜的分辨率仅在230nm至1000nm范围内,难以满足成像需求。
2、有鉴于此,本文旨在提供一种基于近场光的纳米尺度成像系统、三维成像方法和装置。
技术实现思路
1、针对现有技术的上述问题,本文的目的在于,提供一种基于近场光的纳米尺度成像系统、三维成像方法和装置,以解决现有技术中难以实现纳米尺度三维成像的问题。
2、为了解决上述技术问题,本文的具体技术方案如下:
3、一方面,本文提供一种基于近场光的纳米尺度成像系统,包括:
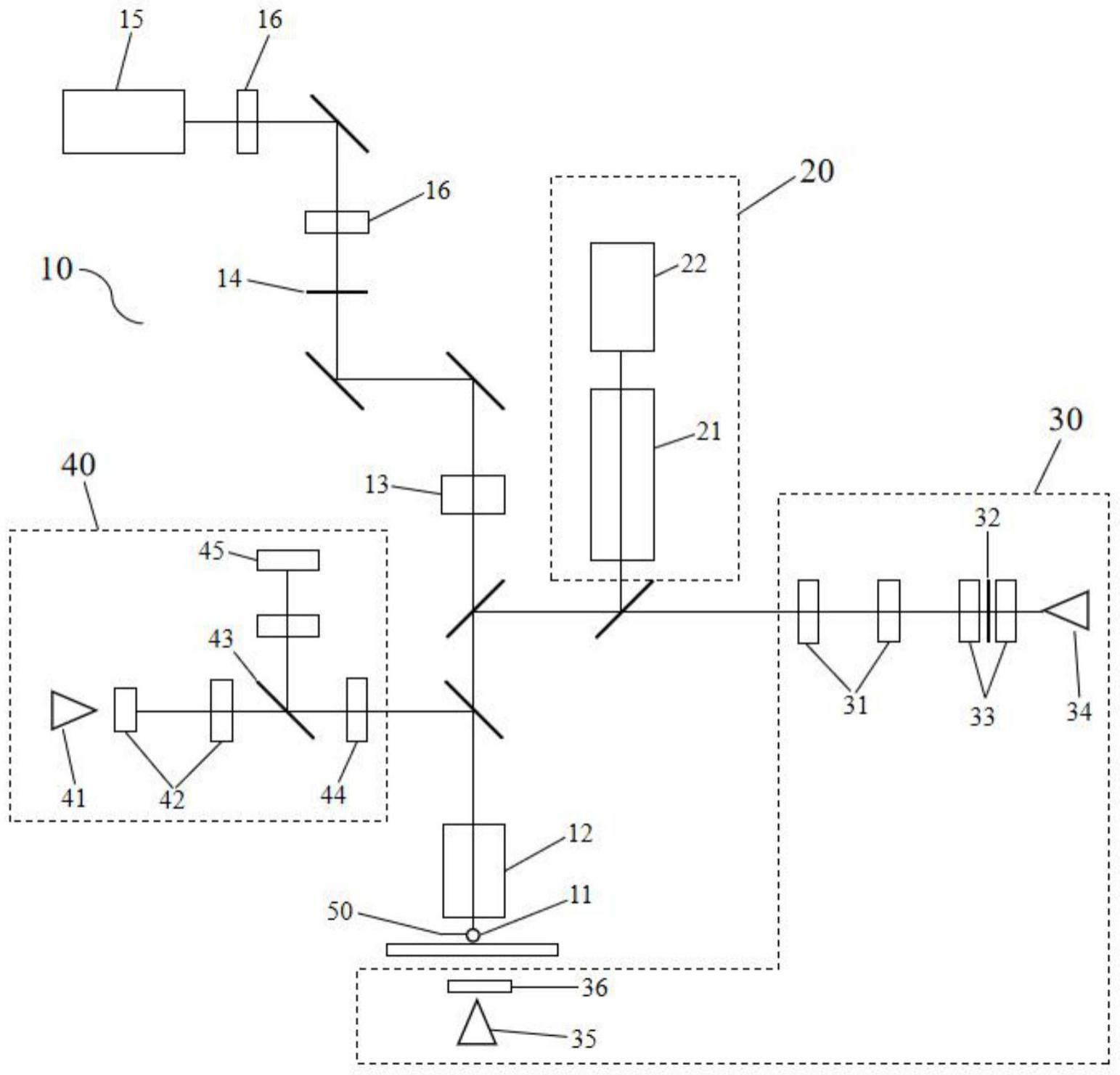
4、光场图像获取单元,所述光场图像获取单元包括顺次连接的介电质微球透镜、物镜、主透镜、微透镜阵列和ccd相机;所述介电质微球透镜用于将待观测样本放大至纳米尺度,所述物镜用于观测所述待观测样本,所述主透镜用于聚焦准直光经所述微透镜阵列至所述ccd相机处,所述微透镜阵列用于把光线聚焦到ccd相机的每个像素上,所述ccd相机用于拍摄所述待观测样本的光场图像;
5、照明单元,用于为所述光场图像获取单元观测所述待观测样本提供光源;
6、介电质微球透镜定位单元,用于确定所述介电质微球透镜与所述待观测样本之间的相对位置。
7、具体地,所述成像系统还包括二维变焦成像单元;
8、所述二维变焦成像单元设置在所述物镜远离所述介电质微球透镜的一侧,所述二维变焦成像单元与所述光场图像获取单元共用所述介电质微球透镜、所述物镜和所述照明单元;
9、所述二维变焦成像单元包括变倍镜头和显微相机,所述变倍镜头用于将光线聚焦到显微相机不同聚焦深度的成像平面上,所述显微相机用于拍摄所述待观测样本在不同聚焦深度的二维图像。
10、进一步地,所述介电质微球透镜定位单元包括激光光源、扩束器、极化分光镜、1/4波片和光电位置传感器。
11、优选地,所述成像系统还包括介电质微球透镜调节单元;
12、所述介电质微球透镜调节单元包括悬臂梁和调节臂;
13、所述悬臂梁用于承载所述介电质微球透镜;
14、所述调节臂与所述悬臂梁相连,所述调节臂用于垂直和/或水平调节所述悬臂梁以调节所述介电质微球透镜与所述待观测样本之间的相对位置。
15、第二方面,本文提供一种三维成像方法,包括:
16、利用如上述技术方案提供的一种基于近场光的纳米尺度成像系统获取实际观测样本的初始光场图像;
17、将所述初始光场图像输入至预先训练好的神经网络,得到优化后的光场图像;
18、对所述优化后的光场图像进行三维重建处理,得到所述实际观测样本的三维图像。
19、进一步地,对所述优化后的光场图像进行三维重建,得到所述实际观测样本的三维图像,包括:
20、获取所述优化后的光场图像每个像素的光线强度信息和光线方向信息;
21、根据每个像素的所述光线强度信息和所述光线方向信息对所述优化后的光场图像进行重聚焦处理,获得所述实际观测样本在不同聚焦深度的图像序列;
22、对所述实际观测样本的在不同聚焦深度的图像序列进行轮廓获取和曲面重构,得到所述三维图像。
23、优选地,所述神经网络通过如下步骤训练得到:
24、获取标准化样本训练集,所述标准化样本训练集包括多个标准化样本的初始光场图像和与各初始光场图像相对应的实际光场图像;所述实际光场图像通过所述基于近场光的纳米尺度成像系统中的二维变焦成像单元获取的所述标准化样本在不同聚焦深度的二维图像得到;
25、利用所述标准化样本训练集训练所述神经网络,直至所述神经网络输出的各标准化样本的优化后的光场图像与对应的实际光场图像之间的误差在预设的误差范围内,得到训练好的神经网络。
26、第三方面,本文提供一种三维成像装置,包括:
27、获取模块,用于基于近场光的纳米尺度成像系统获取实际观测样本的初始光场图像;
28、优化模块,用于将所述初始光场图像输入至预先训练好的神经网络,得到优化后的光场图像;
29、重建模块,用于对所述优化后的光场图像进行三维重建处理,得到所述实际观测样本的三维图像。
30、第四方面,本文还提供一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述技术方案提供的一种三维成像方法。
31、第五方面,本文还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上述技术方案提供的一种三维成像方法。
32、采用上述技术方案,本文所述一种基于近场光的纳米尺度成像系统、三维成像方法和装置,通过介电质微球透镜的近场光学成像突破了光学成像的衍射极限,获取样本在纳米尺度下的超分辨图像;并结合微透镜阵列得到样本的光场成像,从而可基于此实现对样本的超分辨的三维成像,可应用于芯片、微纳米传感器的生产领域,以及对细胞尺度微观结构的观测领域,应用广泛。
33、为让本文的上述和其他目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附图式,作详细说明如下。
技术特征:
1.一种基于近场光的纳米尺度成像系统,其特征在于,包括:
2.根据权利要求1所述的基于近场光的纳米尺度成像系统,其特征在于,所述成像系统还包括二维变焦成像单元;
3.根据权利要求1所述的基于近场光的纳米尺度成像系统,其特征在于,所述介电质微球透镜定位单元包括激光光源、扩束器、极化分光镜、1/4波片和光电位置传感器。
4.根据权利要求1所述的基于近场光的纳米尺度成像系统,其特征在于,所述成像系统还包括介电质微球透镜调节单元;
5.一种三维成像方法,其特征在于,所述方法包括:
6.根据权利要求5所述的三维成像方法,其特征在于,对所述优化后的光场图像进行三维重建,得到所述实际观测样本的三维图像,进一步包括:
7.根据权利要求5所述的三维成像方法,其特征在于,所述神经网络通过如下步骤训练得到:
8.一种三维成像装置,其特征在于,包括:
9.一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求5至7任意一项所述的方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求5至7任意一项所述的方法。
技术总结
本文提供一种基于近场光的纳米尺度成像系统、三维成像方法和装置,其中成像系统包括光场图像获取单元,光场图像获取单元包括顺次连接的介电质微球透镜、物镜、主透镜、微透镜阵列和CCD相机,介电质微球透镜用于将待观测样本放大至纳米尺度,微透镜阵列用于把光线聚焦到CCD相机的每个像素上以使CCD相机拍摄得到待观测样本的光场图像;用于提供光源的照明单元;用于确定介电质微球透镜与待观测样本之间的相对位置的介电质微球透镜定位单元。本文提供的成像系统将介电质微球透镜与微透镜阵列相结合,使得将突破了光学成像衍射极限的近场光学成像与用于三维重建的光场成像相结合,实现了对样本的超分辨的三维成像。
技术研发人员:陈猛,张光烈,李文荣
受保护的技术使用者:香港城市大学深圳研究院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!