一种激光成像控制方法及相关设备与流程
本申请涉及激光成像,尤其涉及一种激光成像控制方法及相关设备。
背景技术:
1、相关技术中的激光直接成像设备(例如申请号为:201310084860.3中公开的平面丝网印刷网版用激光直接制版装置)往往控制激光器组件在预设水平方向来回往复扫描曝光面上的感光涂层。在扫描过程中,需要实时检测激光器组件的水平方向的位置,当激光器可照射曝光的位置到达需要曝光像素点位置时,控制激光点亮,以对需要曝光像素点进行曝光。
2、申请人发现,现有的激光直接成像设备中在水平扫描过程中,沿竖直方向分布的激光器阵列会因为传动装置的振动而在竖直方向发生偏移,即激光器阵列不能保持竖直状态,导致水平方向位置检测出现误差,降低激光成像精度。申请人发现,即使采用传感器检测激光器阵列的偏移情况,然而检测信号发出之后,需要对检测信号处理并触发修正信号,然后还需要将修正信号传输至驱动器,这一过程会导致的激光器响应延时,也会导致修正延迟,降低激光成像精度。为解决上述任一问题,提高激光成像的精度,有必要对现有的激光成像控制方法进行改进。
技术实现思路
1、本申请实施例提供了一种激光成像控制方法及相关设备,用于提高激光成像精度。
2、本申请实施例第一方面提供了一种激光成像控制方法,可包括:
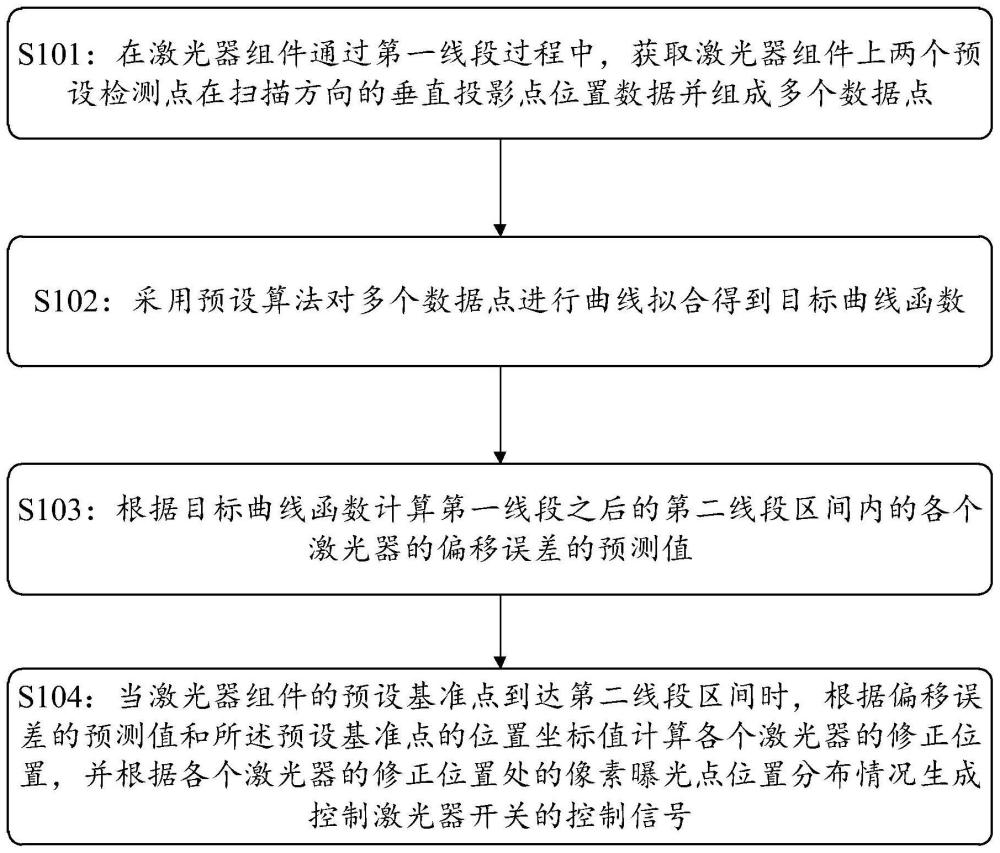
3、在激光器组件通过第一线段过程中,获取所述激光器组件上两个预设检测点在扫描方向的垂直投影点位置数据并组成多个数据点;其中,当所述激光器组件处于静止状态时,所述两个预设检测点的连线与所述扫描方向垂直;每个所述数据点包含所述两个预设检测点在同一时刻分别在扫描方向的垂直投影点位置数据;
4、采用预设算法对所述多个数据点进行曲线拟合得到目标曲线函数;
5、根据所述目标曲线函数计算所述第一线段之后的第二线段区间内的各个激光器的偏移误差的预测值;
6、当所述激光器组件的预设基准点到达所述第二线段区间时,根据所述偏移误差的预测值和所述预设基准点的位置坐标值计算各个激光器的修正位置,并根据各个激光器的修正位置处的像素曝光点位置分布情况生成控制激光器开关的控制信号,以完成像素曝光点处感光涂层的曝光。
7、可选的,作为一种可能的实施方式,所述根据所述目标曲线函数计算所述第一线段之后的第二线段区间内的各个激光器的偏移误差的预测值,包括:
8、将所述第一线段之后的第二线段区间的位置作为个预设检测点的位置带入所述目标曲线函数计算另一个预设检测点的预测位置;
9、计算所述两个预设检测点的预测位置的差值作为总偏差s,并计算s与n1+1的比值作为等差值d;n1为所述两个预设检测点之间的激光器的数量;
10、将n2+1与所述等差值d的乘积作为各个激光器的偏移误差的预测值;n2为各个激光器与预设基准点之间的间隔的激光器数量。
11、可选的,作为一种可能的实施方式,所述根据所述目标曲线函数计算所述第一线段之后的第二线段区间内的各个激光器的偏移误差的预测值,包括:
12、计算所述两个预设检测点的预测位置的连线与扫描竖直方向的夹角作为倾斜角;
13、将各个激光器与预设基准点的实际间距以及所述倾斜角的正弦的乘积计算各个激光器的偏移误差的预测值。
14、可选的,作为一种可能的实施方式,所述根据所述偏移误差的预测值计算修正位置,包括:
15、将各个激光器的偏移误差的预测值与所述预设基准点的位置的和或差作为修正位置。
16、可选的,作为一种可能的实施方式,所述预设算法为最小二乘法或三次样条曲线拟合算法。
17、本申请实施例第二方面提供了一种激光直接成像设备,可包括:
18、上位机、可编程逻辑器件、激光器组件以及两组线性位置编码器;其中,
19、所述激光器组件上设置有沿直线分布的激光器阵列,且所述激光器组件在电机的驱动下可带动所述激光器阵列在水平方向和竖直方向移动;
20、每一组所述线性位置编码器包含固定标尺和多个移动读头;
21、所述线性位置编码器的移动读头安装在所述激光器组件上,用于在激光成像过程中检测所述激光器阵列所在目标直线上的两个预设检测点的位置;
22、所述上位机与所述可编程逻辑器件电连接,所述上位机用于向所述可编程逻辑器件传输激光曝光点位置信息;
23、所述可编程逻辑器件分别与激光器的驱动器、两组所述线性位置编码器的移动读头电连接;所述可编程逻辑器件通过所述移动读头周期性获取所述目标直线上的两个预设检测点的位置,并根据所述两个预设检测点的位置计算每个激光器的修正位置,并根据每个激光器的修正位置生成控制激光器开关的控制信号。
24、可选的,作为一种可能的实施方式,所述可编程逻辑器件根据所述两个预设检测点的位置计算每个激光器的修正位置,包括:
25、采用预设算法对所述两个预设检测点的位置数据形成的多个数据点进行曲线拟合得到目标曲线函数;
26、根据所述目标曲线函数计算第二线段区间内的各个激光器的偏移误差的预测值;
27、当所述激光器组件到达所述第二线段区间时,根据所述偏移误差的预测值计算各个激光器的修正位置。
28、可选的,作为一种可能的实施方式,所述激光器组件包括:水平导轨、水平移动平台以及竖直移动平台;其中,
29、所述水平移动平台设置在水平导轨上,且在第一驱动电机的驱动下可沿所述水平导轨移动,所述水平移动平台上设置有竖直导轨,所述竖直移动平台设置在竖直导轨上,且在第二驱动电机的驱动下可沿竖直导轨移动,所述竖直移动平台上安装有多个沿直线分布的多个激光器形成激光阵列。
30、可选的,作为一种可能的实施方式,所述线性位置编码器为磁栅式传感器或光栅式传感器。
31、本申请实施例第三方面提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如第一方面及第一方面中任意一种可能的实施方式中的步骤。
32、从以上技术方案可以看出,本申请实施例具有以下优点:
33、本申请实施例中,在激光器组件通过第一线段过程中,检测激光器组件上两个预设检测点在扫描方向的垂直投影点位置数据并组成多个数据点,然后采用预设算法对多个数据点进行曲线拟合得到目标曲线函数,并根据目标曲线函数计算第一线段之后的第二线段区间内的各个激光器的偏移误差的预测值,最后根据偏移误差的预测值计算各个激光器的修正位置,并根据各个激光器的修正位置处的像素曝光点位置分布情况生成控制激光器开关的控制信号。相对于现有技术,本申请可以计算各个激光器的偏移误差的预测值,并根据偏移误差的预测值修正检测位置的误差,可以降低检测位置与实际位置的差距,即降低了理论曝光位置与实际曝光位置的偏差,提高了激光成像的精度。
技术特征:
1.一种激光成像控制方法,其特征在于,应用于直接成像设备,所述直接成像设备的激光器组件在电机的驱动下沿行像素平行方向对曝光面进行往复移动扫描;所述激光成像控制方法包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述目标曲线函数计算所述第一线段之后的第二线段区间内的各个激光器的偏移误差的预测值,包括:
3.根据权利要求1所述的方法,其特征在于,所述根据所述目标曲线函数计算所述第一线段之后的第二线段区间内的各个激光器的偏移误差的预测值,包括:
4.根据权利要求2或3所述的方法,其特征在于,所述根据所述偏移误差的预测值和所述预设基准点的位置坐标值计算各个激光器的修正位置,包括:
5.根据权利要求1至4中任一项所述的方法,其特征在于,所述预设算法为最小二乘法或三次样条曲线拟合算法。
6.一种激光直接成像设备,其特征在于,包括:上位机、可编程逻辑器件、激光器组件以及两组线性位置编码器;其中,
7.根据权利要求6所述的激光直接成像设备,其特征在于,所述可编程逻辑器件根据所述两个预设检测点的多组位置数据计算每个激光器的修正位置,包括:
8.根据权利要求6所述的激光直接成像设备,其特征在于,所述激光器组件包括:水平导轨、水平移动平台以及竖直移动平台;其中,
9.根据权利要求6至8中任一项所述的激光直接成像设备,其特征在于,所述线性位置编码器为磁栅式传感器或光栅式传感器。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于:所述计算机程序被处理器执行时实现如权利要求1至4中任意一项所述方法。
技术总结
本申请实施例提供了一种激光成像控制方法及相关设备,用于提高激光成像精度。本申请实施例在激光器组件通过第一线段过程中,获取激光器组件上两个预设检测点在扫描方向的垂直投影点位置数据并组成多个数据点,然后采用预设算法对多个数据点进行曲线拟合得到目标曲线函数,并根据目标曲线函数计算第一线段之后的第二线段区间内的各个激光器的偏移误差的预测值,最后根据偏移误差的预测值计算各个激光器的修正位置。相对于现有技术,本申请可以计算各个激光器的偏移误差的预测值,并根据偏移误差的预测值修正检测位置的误差,降低了激光器的检测位置与实际位置的误差,即降低了理论曝光位置与实际曝光位置的偏差,提高了激光成像的精度。
技术研发人员:陈乃奇,陈钢
受保护的技术使用者:深圳市先地图像科技有限公司
技术研发日:
技术公布日:2024/5/27
- 还没有人留言评论。精彩留言会获得点赞!