一种定位机构的制作方法
1.本实用新型涉及光刻机的技术领域,特别涉及一种定位机构。
背景技术:
2.目前市场上对gpp芯片的定位,是通过人工以特定位置和方向,先将晶圆放置在承片治具上,目视校准后负压固定;再放置掩模,在显微镜下,将掩模与晶圆上的晶粒校准后负压固定掩模。然而上述定位方式存在效率比较低下的情况,且长时间镜下操作会影响视力。因此目前需要研发出一种通用性好、便于定位及定位精度高的定位机构。
技术实现要素:
3.本实用新型所要解决的技术问题是克服现有技术的不足,提供了一种通用性好、便于定位及定位精度高的定位机构。
4.本实用新型所采用的技术方案是:本实用新型包括粗定位机构及精定位机构,所述粗定位机构包括安装座及第一相机模组,所述安装座上设置有夹爪机构及与所述夹爪机构配合的旋转吸附台,所述旋转吸附台可沿所述安装座的z轴方向移动,所述第一相机模组位于所述旋转吸附台的上方,所述精定位机构包括真空吸附台、xyr精密对位平台、第二相机模组,所述真空吸附台设置在所述xyr精密对位平台上,所述第二相机模组位于所述真空吸附台的上方。
5.进一步,所述夹爪机构包括第一滑轨、同步带组件及夹爪本体,所述夹爪本体滑动配合在所述第一滑轨上,所述同步带组件驱动所述夹爪本体在所述第一滑轨上开合。
6.进一步,所述旋转吸附台包括旋转电机、真空发生器及旋转台,所述旋转电机驱动所述旋转台旋转,所述旋转台中设有气路,所述气路通过气管与所述真空发生器连通。
7.进一步,所述同步带组件包括步进电机及同步带,所述步进电机驱动所述同步带传动,所述同步带的内侧设置有第一传动齿,所述夹爪本体上设置有与所述传动齿配合的第二传动齿。
8.进一步,所述粗定位机构还包括设置在安装座上的z轴移动模组,所述旋转吸附台通过所述z轴移动模组相对于所述安装座移动,所述z轴移动模组包括驱动电机及丝杆,所述驱动电机驱动所述丝杆传动,所述丝杆与所述旋转吸附台相传动。
9.进一步,所述夹爪本体为v型仿形夹爪。
10.进一步,所述第一相机模组及所述第二相机模组均包括ccd工业相机。
11.本实用新型的有益效果是:
12.相对于现有技术的不足,本实用新型通过所述粗定位机构及所述精定位机构对晶圆进行高精度定位,将中心位置有偏差、任意角度的晶圆分两步调整至正确的位置及角度的待刻位状态,并通过所述第一相机模组及所述第二相机模组进行识别处理而无需人工镜下操作,且能够对4吋、5吋、6吋的晶圆通用,使得本实用新型具有通用性好、便于定位及定位精度高的优点。
附图说明
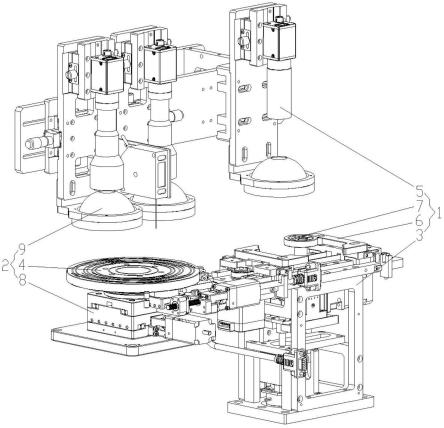
13.图1是本实用新型的立体结构示意图;
14.图2是粗定位机构的立体结构示意图;
15.图3是粗定位机构的平面结构示意图;
16.图4是粗定位机构另一视角的平面结构示意图。
17.附图标记如下:
18.1、粗定位机构;2、精定位机构;3、安装座;4、真空吸附台;5、第一相机模组;6、夹爪机构;7、旋转吸附台;8、xyr精密对位平台;9、第二相机模组;10、第一滑轨;11、同步带组件;12、夹爪本体;13、旋转电机;15、旋转台;16、步进电机;17、同步带;18、第一传动齿;20、z轴移动模组;21、驱动电机;22、丝杆。
具体实施方式
19.如图1至图4所示,在本实施例中,本实用新型包括粗定位机构1及精定位机构2,所述粗定位机构1包括安装座3及第一相机模组5,所述安装座3上设置有夹爪机构6及与所述夹爪机构6配合的旋转吸附台7,所述旋转吸附台7可沿所述安装座3的z轴方向移动,所述第一相机模组5位于所述旋转吸附台7的上方,所述精定位机构2包括真空吸附台4、xyr精密对位平台8、第二相机模组9,所述真空吸附台4设置在所述xyr精密对位平台8上,所述第二相机模组9位于所述真空吸附台4的上方。所述真空吸附台4内置气路,该气路于所述真空吸附台4上端面相应设有吸附口,该气路通过气管与外部供气设备连通。
20.相对于现有技术的不足,在本实用新型中,粗定位时,所述夹爪机构6对放置于所述旋转吸附台7上的晶圆夹持对中后,所述旋转吸附台7通过真空吸附固定晶圆,并通过所述第一相机模组5对晶圆进行拍照,结合晶圆上的基准点特征,计算晶圆原始角度,进一步所述旋转吸附台7带动晶圆旋转,将晶圆调整到原始角度0度附近,从而完成粗定位;精定位时,将晶圆上料至所述真空吸附台4上,通过所述第二相机模组9拍照进行图像识别后,驱动所述xyr精密对位平台8将晶圆矫正至正确的位置后,通过所述真空吸附台4对晶圆进行吸附固定,从而完成精定位,因此,本实用新型通过所述粗定位机构1及所述精定位机构2对晶圆进行高精度定位,将中心位置有偏差、任意角度的晶圆分两步调整至正确的位置及角度的待刻位状态,并通过所述第一相机模组5及所述第二相机模组9进行识别处理而无需人工镜下操作,且能够对4吋、5吋、6吋的晶圆通用,使得本实用新型具有通用性好、便于定位及定位精度高的优点。
21.在某些实施例中,所述夹爪机构6包括第一滑轨10、同步带组件11及夹爪本体12,所述夹爪本体12滑动配合在所述第一滑轨10上,所述同步带组件11驱动所述夹爪本体12在所述第一滑轨10上开合。通过所述同步带组件11的驱动所述夹爪本体12同步夹持对中。
22.在某些实施例中,所述旋转吸附台7包括旋转电机13、真空发生器及旋转台15,所述旋转电机13驱动所述旋转台15旋转,所述旋转台15中设有气路,所述气路通过气管与所述真空发生器连通。
23.在某些实施例中,所述同步带组件11包括步进电机16及同步带17,所述步进电机16驱动所述同步带17传动,所述同步带17的内侧设置有第一传动齿18,所述夹爪本体12上设置有与所述传动齿配合的第二传动齿。需要说明的是,所述同步带17传动时,通过所述第
一传动齿18与所述第二传动齿的传动而使得所述夹爪本体12夹持对中。
24.在某些实施例中,所述粗定位机构1还包括设置在安装座3上的z轴移动模组20,所述旋转吸附台7通过所述z轴移动模组20相对于所述安装座3移动,所述z轴移动模组20包括驱动电机21及丝杆22,所述驱动电机21驱动所述丝杆22传动,所述丝杆22与所述旋转吸附台7相传动。使用时,所述驱动电机21驱动所述丝杆22传动,使得所述丝杆22驱动所述旋转吸附台7沿z轴上下移动。
25.在某些实施例中,所述夹爪本体12为v型仿形夹爪。
26.在某些实施例中,所述第一相机模组5及所述第二相机模组9均包括ccd工业相机。具体地,所述第一相机模组5包括一个ccd工业相机,所述第二相机模组9包括两个ccd工业相机。
27.虽然本实用新型的实施例是以实际方案来描述的,但是并不构成对本实用新型含义的限制,对于本领域的技术人员,根据本说明书对其实施方案的修改及与其他方案的组合都是显而易见的。
技术特征:
1.一种定位机构,其特征在于:其包括粗定位机构(1)及精定位机构(2),所述粗定位机构(1)包括安装座(3)及第一相机模组(5),所述安装座(3)上设置有夹爪机构(6)及与所述夹爪机构(6)配合的旋转吸附台(7),所述旋转吸附台(7)可沿所述安装座(3)的z轴方向移动,所述第一相机模组(5)位于所述旋转吸附台(7)的上方,所述精定位机构(2)包括真空吸附台(4)、xyr精密对位平台(8)、第二相机模组(9),所述真空吸附台(4)设置在所述xyr精密对位平台(8)上,所述第二相机模组(9)位于所述真空吸附台(4)的上方。2.根据权利要求1所述的一种定位机构,其特征在于:所述夹爪机构(6)包括第一滑轨(10)、同步带组件(11)及夹爪本体(12),所述夹爪本体(12)滑动配合在所述第一滑轨(10)上,所述同步带组件(11)驱动所述夹爪本体(12)在所述第一滑轨(10)上开合。3.根据权利要求1所述的一种定位机构,其特征在于:所述旋转吸附台(7)包括旋转电机(13)、真空发生器及旋转台(15),所述旋转电机(13)驱动所述旋转台(15)旋转,所述旋转台(15)中设有气路,所述气路通过气管与所述真空发生器连通。4.根据权利要求2所述的一种定位机构,其特征在于:所述同步带组件(11)包括步进电机(16)及同步带(17),所述步进电机(16)驱动所述同步带(17)传动,所述同步带(17)的内侧设置有第一传动齿(18),所述夹爪本体(12)上设置有与所述传动齿配合的第二传动齿。5.根据权利要求1所述的一种定位机构,其特征在于:所述粗定位机构(1)还包括设置在安装座(3)上的z轴移动模组(20),所述旋转吸附台(7)通过所述z轴移动模组(20)相对于所述安装座(3)移动,所述z轴移动模组(20)包括驱动电机(21)及丝杆(22),所述驱动电机(21)驱动所述丝杆(22)传动,所述丝杆(22)与所述旋转吸附台(7)相传动。6.根据权利要求2所述的一种定位机构,其特征在于:所述夹爪本体(12)为v型仿形夹爪。7.根据权利要求1所述的一种定位机构,其特征在于:所述第一相机模组(5)及所述第二相机模组(9)均包括ccd工业相机。
技术总结
本实用新型公开了一种定位机构,旨在提供一种通用性好、便于定位及定位精度高的定位机构。本实用新型包括粗定位机构及精定位机构,所述粗定位机构包括安装座及第一相机模组,所述安装座上设置有夹爪机构及与所述夹爪机构配合的旋转吸附台,所述旋转吸附台可沿所述安装座的Z轴方向移动,所述第一相机模组位于所述旋转吸附台的上方,所述精定位机构包括真空吸附台、XYR精密对位平台、第二相机模组,所述真空吸附台设置在所述XYR精密对位平台上,所述第二相机模组位于所述真空吸附台的上方。本实用新型应用于光刻机的技术领域。实用新型应用于光刻机的技术领域。实用新型应用于光刻机的技术领域。
技术研发人员:吕波 胡超 周沃坤
受保护的技术使用者:珠海市科迪电子科技有限公司
技术研发日:2022.05.20
技术公布日:2022/10/24
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1