一种可调节度数智能眼镜的控制组件的制作方法
1.本实用新型涉及智能眼镜技术领域,尤其涉及一种可调节度数智能眼镜的控制组件。
背景技术:
2.现有的智能眼镜,主要分为两种,一种是适用于视力正常人群佩戴的,另一种则是适用于近视人员佩戴的,现有的一些两块镜片组成的近视镜片,通过调整两块镜片之间的位置关系则可以使得眼镜度数发生变化,而且现在的智能眼镜也可以通过语音进行控制。
3.可是,现在的可调节度数的智能眼镜内部的驱动装置所使用的同一个控制主板与驱动装置之间的连接关系较为死板,灵活程度较低。
4.因此,我们提出了一种可调节度数智能眼镜的控制组件用于解决上述问题。
技术实现要素:
5.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种可调节度数智能眼镜的控制组件。
6.为了实现上述目的,本实用新型采用了如下技术方案:一种可调节度数智能眼镜的控制组件,包括横梁和两个镜腿,两个镜腿均和横梁转动连接在一起,所述横梁上设有两个镜片组,所述横梁内固定安装有分别调整两个镜片组的度数的两个无间隙精密移动步进马达总成,两个无间隙精密移动步进马达总成呈同方向的线性排列,两个无间隙精密移动步进马达总成之间电性连接有同一个控制组件,两个无间隙精密移动步进马达总成均与控制组件电性连接在一起。
7.优选的,所述镜片组包括镜片一和镜片二,所述无间隙精密移动步进马达总成包括固定安装在横梁内壁上的直线滑台模组上,所述直线滑台模组上滑动安装有滑块,所述镜片一和镜片二分别与直线滑台模组上以及滑块可拆卸式的连接在一起。
8.优选的,所述直线滑台模组远离滑块的一侧固定安装有排线一,所述排线一上固定安装有接线公头。
9.优选的,所述控制组件包括与横梁内壁固定连接的控制主板,所述控制主板上固定安装有排线二,所述控制主板和排线二的同一侧分别固定安装有接线母头一和接线母头二,两个无间隙精密移动步进马达总成上的接线公头分别与接线母头一和接线母头二可拆卸式的连接在一起。
10.优选的,所述横梁和镜腿贴近皮肤的一侧均安装有柔性垫。
11.与现有技术相比,本实用新型的有益效果是:
12.本实用新型通过将两个无间隙精密移动步进马达总成安装同方向的排列,之后通过控制组件控制两个无间隙精密移动步进马达总成带动两个镜片组同方向进行度数的调整,且两个无间隙精密移动步进马达总成与控制组件之间柔性连接在一起,使得三者之间连接关系更为灵活。
附图说明
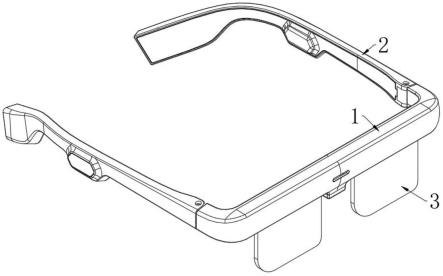
13.图1为本实用新型提出的一种可调节度数智能眼镜的控制组件的整体结构示意图;
14.图2为本实用新型提出的一种可调节度数智能眼镜的控制组件的部分结构示意图;
15.图3为本实用新型提出的一种可调节度数智能眼镜的控制组件中控制组件和无间隙精密移动步进马达总成的结构示意图;
16.图4为本实用新型提出的一种可调节度数智能眼镜的控制组件中无间隙精密移动步进马达总成的结构示意图;
17.图5为本实用新型提出的一种可调节度数智能眼镜的控制组件中控制组件的结构示意图。
18.图中:1、横梁;2、镜腿;3、镜片组;31、镜片一;32、镜片二;4、无间隙精密移动步进马达总成;41、直线滑台模组;42、滑块;43、排线一;44、接线公头;5、控制组件;51、控制主板;52、接线母头一;53、排线二;54、接线母头二。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.实施例
21.参考图1-5,本实施例中提出了一种可调节度数智能眼镜的控制组件,包括横梁1和两个镜腿2,两个镜腿2均和横梁1转动连接在一起,横梁1上设有两个镜片组3,横梁1内固定安装有分别调整两个镜片组3的度数的两个无间隙精密移动步进马达总成4,两个无间隙精密移动步进马达总成4呈同方向的线性排列,两个无间隙精密移动步进马达总成4之间电性连接有同一个控制组件5,两个无间隙精密移动步进马达总成4均与控制组件5电性连接在一起。
22.两个同方向排列的无间隙精密移动步进马达总成4能够使得两个镜片组3能够进行同方向的调整。
23.镜片组3包括镜片一31和镜片二32,无间隙精密移动步进马达总成4包括固定安装在横梁1内壁上的直线滑台模组41上,直线滑台模组41上滑动安装有滑块42,镜片一31和镜片二32分别与直线滑台模组41上以及滑块42可拆卸式的连接在一起。
24.进一步的,直线滑台模组41接收电信号能够带动滑块42进行位移,从而使得镜片一31和镜片二32之间的位置关系发生改变,从而导致镜片组3的度数发生变化。
25.直线滑台模组41远离滑块42的一侧固定安装有排线一43,排线一43上固定安装有接线公头44。
26.排线一43为较软材质包裹的排线,根据直线滑台模组41在横梁 1内安装位置的不同,能够调整接线公头44的安装位置。
27.控制组件5包括与横梁1内壁固定连接的控制主板51,控制主板51上固定安装有排
线二53,控制主板51和排线二53的同一侧分别固定安装有接线母头一52和接线母头二54,两个无间隙精密移动步进马达总成4上的接线公头44分别与接线母头一52和接线母头二 54可拆卸式的连接在一起。
28.进一步的,通过控制主板51能够将接收到的控制信号转化成直线滑台模组41运行的电信号,之后控制主板51再通过接线母头一 52以及排线二53和接线母头二54将控制主板51转化的电信号分别传递给两个直线滑台模组41。
29.进一步的,靠近控制主板51的接线公头44将与接线母头一52 卡接在一起,而远离控制主板51的接线公头44将与接线母头二54 卡接在一起,在此过程当中,远离控制主板51的接线母头二54无需翻折相应的排线二53来靠近控制主板51,因此能够使得两个无间隙精密移动步进马达总成4上的排线一43均保持平直的转态,而不翻折的排线二53故障率更低。
30.横梁1和镜腿2贴近皮肤的一侧均安装有柔性垫。
31.进一步的,增加柔性垫能够提高用户佩戴横梁1和镜腿2的舒适性。
32.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
技术特征:
1.一种可调节度数智能眼镜的控制组件,包括横梁(1)和两个镜腿(2),其特征在于,两个镜腿(2)均和横梁(1)转动连接在一起,所述横梁(1)上设有两个镜片组(3),所述横梁(1)内固定安装有分别调整两个镜片组(3)的度数的两个无间隙精密移动步进马达总成(4),两个无间隙精密移动步进马达总成(4)呈同方向的线性排列,两个无间隙精密移动步进马达总成(4)之间电性连接有同一个控制组件(5),两个无间隙精密移动步进马达总成(4)均与控制组件(5)电性连接在一起。2.根据权利要求1所述的一种可调节度数智能眼镜的控制组件,其特征在于,所述镜片组(3)包括镜片一(31)和镜片二(32),所述无间隙精密移动步进马达总成(4)包括固定安装在横梁(1)内壁上的直线滑台模组(41)上,所述直线滑台模组(41)上滑动安装有滑块(42),所述镜片一(31)和镜片二(32)分别与直线滑台模组(41)上以及滑块(42)可拆卸式的连接在一起。3.根据权利要求2所述的一种可调节度数智能眼镜的控制组件,其特征在于,所述直线滑台模组(41)远离滑块(42)的一侧固定安装有排线一(43),所述排线一(43)上固定安装有接线公头(44)。4.根据权利要求3所述的一种可调节度数智能眼镜的控制组件,其特征在于,所述控制组件(5)包括与横梁(1)内壁固定连接的控制主板(51),所述控制主板(51)上固定安装有排线二(53),所述控制主板(51)和排线二(53)的同一侧分别固定安装有接线母头一(52)和接线母头二(54),两个无间隙精密移动步进马达总成(4) 上的接线公头(44)分别与接线母头一(52)和接线母头二(54)可拆卸式的连接在一起。5.根据权利要求1所述的一种可调节度数智能眼镜的控制组件,其特征在于,所述横梁(1)和镜腿(2)贴近皮肤的一侧均安装有柔性垫。
技术总结
本实用新型属于智能眼镜技术领域,尤其为一种可调节度数智能眼镜的控制组件,包括横梁和两个镜腿,两个镜腿均和横梁转动连接在一起,所述横梁上设有两个镜片组,所述横梁内固定安装有分别调整两个镜片组的度数的两个无间隙精密移动步进马达总成,两个无间隙精密移动步进马达总成呈同方向的线性排列,两个无间隙精密移动步进马达总成之间电性连接有同一个控制组件。本实用新型通过将两个无间隙精密移动步进马达总成安装同方向的排列,之后通过控制组件控制两个无间隙精密移动步进马达总成带动两个镜片组同方向进行度数的调整,且两个无间隙精密移动步进马达总成与控制组件之间柔性连接在一起,使得三者之间连接关系更为灵活。灵活。灵活。
技术研发人员:陈银平
受保护的技术使用者:杭州天才神瞳实业有限公司
技术研发日:2022.07.19
技术公布日:2022/11/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1