一种模块化激光导光臂的制作方法
1.本实用新型涉及一种模块化激光导光臂及其组装调试方法和应用,属于激光加工设备领域。
背景技术:
2.现有的三维激光非金属加工设备中,通常包括激光器、导光管路、激光头和运动执行机构。特别的,对于复杂型面的非金属三维零件的加工,加工设备通常是由co2激光器、导光臂、激光头和六轴机器人组成。10.6um波长的co2激光由激光器发出,经过多轴导光臂反射传输至激光头,激光头进行光路整形后聚焦到零件表面,随后在机器人的驱动下实现复杂三维轨迹的加工。
3.导光臂对于一些不能被柔性光纤传输的激光是一种很好的传输方案,导光臂由反射关节和导光管组成。导光臂的技术核心在于光路的校正。现有技术方案中,导光臂的光路校正通常是在所有的反射关节和导光管组装完成后对每个关节进行校正。对于一些工业级高功率导光臂,尤其是臂展很长的导光臂,调试难度很大。随着后期长时间的加工使用,由于机器人的运动或者是工件撞击等异常情况,可能会导致导光臂发生光路漂移,需要对整根导光臂的光路进行重新校正,工作量大,且不能在现场校正,需要返厂维护,耗费时间长。这就限制了导光臂在复杂三维零件加工领域的应用。
技术实现要素:
4.有鉴于此,本实用新型提供了一种模块化激光导光臂,以解决现有技术中的上述技术问题。
5.本实用新型解决上述技术问题的技术方案如下:
6.一种模块化激光导光臂,包括任意组合的两轴反射镜组、导光管组和应力释放器,所述应力释放器套设在所述导光管组上;
7.所述两轴反射镜组包括u型管,所述u型管外拐点处设置有反射镜,所述反射镜与内壁呈45
°
夹角,所述u型管内拐点处设置有高刚性轴承;
8.所述导光管组包括长管和设置在所述长管两端的法兰;
9.所述应力释放器包括两个开口抱箍、旋转环座,所述旋转环座外侧壁上固定连接有万向吊环、旋转半环,所述旋转环座内侧壁上具有润滑片,所述开口抱箍与所述旋转环座抵接。
10.在上述技术方案的基础上,本实用新型还可以做如下改进。
11.进一步,所述长管长度为0~3m,所述长管两端的两个法兰的垂直面平行度不低于0.02mm,水平面同轴度不低于0.02mm。
12.进一步,所述两轴反射镜组的数量为1~10组,所述导光管组的数量为0~5组,所述应力释放器的数量为0~3组。
13.本实用新型的有益效果是:
14.1、模块化的设计思路,通过模块之间的任意组合,可以根据实际工况,轻松的完成光路方案的搭建;
15.2、模块化的设计思路,仅需要对单个模块进行调试校正,操作简单,适合批量化生产;
16.3、模块化的设计思路,便于光路问题排查和现场维修。
附图说明
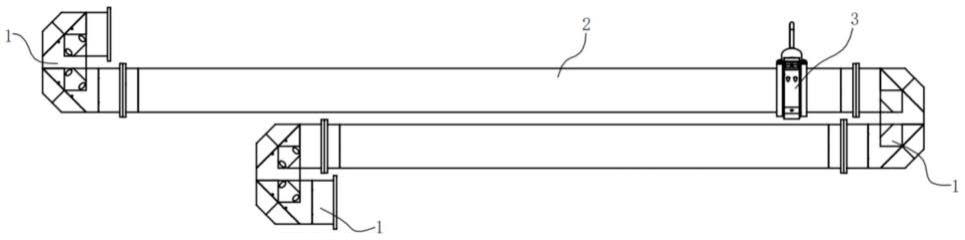
17.图1为本实用新型实施例1模块化激光导光臂结构示意图;
18.图2为本实用新型实施例1导光管组剖视图;
19.图3为本实用新型实施例1应力释放器结构示意图;
20.图4为本实用新型实施例1润滑片安装位置示意图;
21.图5为本实用新型实施例2结构示意图。
22.附图中,各标号所代表的部件列表如下:
23.1、两轴反射镜组,2、导光管组,201、长管,202、法兰,202a、法兰垂直面,202b、法兰水平面,3、应力释放器,301、万向吊环,302、旋转环座,303、旋转半环,304、开口抱箍,305、润滑片。
具体实施方式
24.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
25.在以下实施例中,长管201长度为0~3m,长管201两端的两个法兰202的垂直面202a平行度不低于0.02mm,水平面202b同轴度不低于0.02mm。
26.两轴反射镜组1的数量为1~10组,导光管组2的数量为0~5组,应力释放器3的数量为0~3组。
27.实施例1
28.如图1~4所示,模块化激光导光臂,包括3组两轴反射镜组1、2组导光管组2和1组应力释放器3,上述应力释放器3套设在上述导光管组2上;
29.上述两轴反射镜组1包括u型管,上述u型管外拐点处设置有反射镜,上述反射镜与内壁呈45
°
夹角,上述u型管内拐点处设置有高刚性轴承;
30.上述导光管组2包括长管201和设置在上述长管201两端的法兰202;
31.上述应力释放器3包括两个开口抱箍、旋转环座302,上述旋转环座302外侧壁上固定连接有万向吊环301、旋转半环303,上述旋转环座302内侧壁上具有润滑片305,上述开口抱箍与上述旋转环座302抵接。
32.实施例2
33.如图5所示,模块化激光导光臂包括4组两轴反射镜组1。
34.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种模块化激光导光臂,其特征在于,包括任意组合的两轴反射镜组、导光管组和应力释放器,所述应力释放器套设在所述导光管组上;所述两轴反射镜组包括u型管,所述u型管外拐点处设置有反射镜,所述反射镜与内壁呈45
°
夹角,所述u型管内拐点处设置有高刚性轴承;所述导光管组包括长管和设置在所述长管两端的法兰;所述应力释放器包括两个开口抱箍、旋转环座,所述旋转环座外侧壁上固定连接有万向吊环、旋转半环,所述旋转环座内侧壁上具有润滑片,所述开口抱箍与所述旋转环座抵接。2.根据权利要求1所述的模块化激光导光臂,其特征在于,所述长管长度为0~3m,所述长管两端的两个法兰的垂直面平行度不低于0.02mm,水平面同轴度不低于0.02mm。3.根据权利要求1所述的模块化激光导光臂,其特征在于,所述两轴反射镜组的数量为1~10组,所述导光管组的数量为0~5组,所述应力释放器的数量为0~3组。
技术总结
本实用新型涉及一种模块化激光导光臂,属于激光加工设备领域,导光臂包括任意组合的两轴反射镜组、导光管组和应力释放器,两轴反射镜组包括U型管,U型管外拐点处设置有反射镜,反射镜与内壁呈45
技术研发人员:王相苹 韩公明
受保护的技术使用者:上海通历激光科技有限公司
技术研发日:2022.08.19
技术公布日:2022/11/2
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1