一种光引擎投影镜头及AR设备的制作方法
本发明涉及ar显示,特别涉及一种光引擎投影镜头及ar设备。
背景技术:
1、当前,随着消费者对汽车安全性和驾驶体验需求的提升,导航抬头显示器(headup display,缩写hud)正被用于越来越多的汽车中。hud能将行车信息直接投射到驾驶员的视线范围内(如风挡玻璃内或屏幕上),让驾驶员在行车过程中目光集中在车外。这可以改善驾驶员的驾驶习惯,减小由于低头而引发的驾驶事故。
2、同时,随着对hud视角不断增加需求,导致hud体积不断加大,传统hud很难满足紧凑型车型需求,采用衍射波导技术的hud能整个模组体积大幅缩小,势必为未来hud发展的重点方向,特别是在ar-hud上具备更多优势。而用于传统hud上投影镜头无法直接用在匹配衍射波导的hud上,因此如何克服这一缺陷是本领域技术人员需要解决的问题。
技术实现思路
1、本发明实施例提供了一种光引擎投影镜头及ar设备,旨在提供一种与衍射光波导hud相匹配的投影镜头。
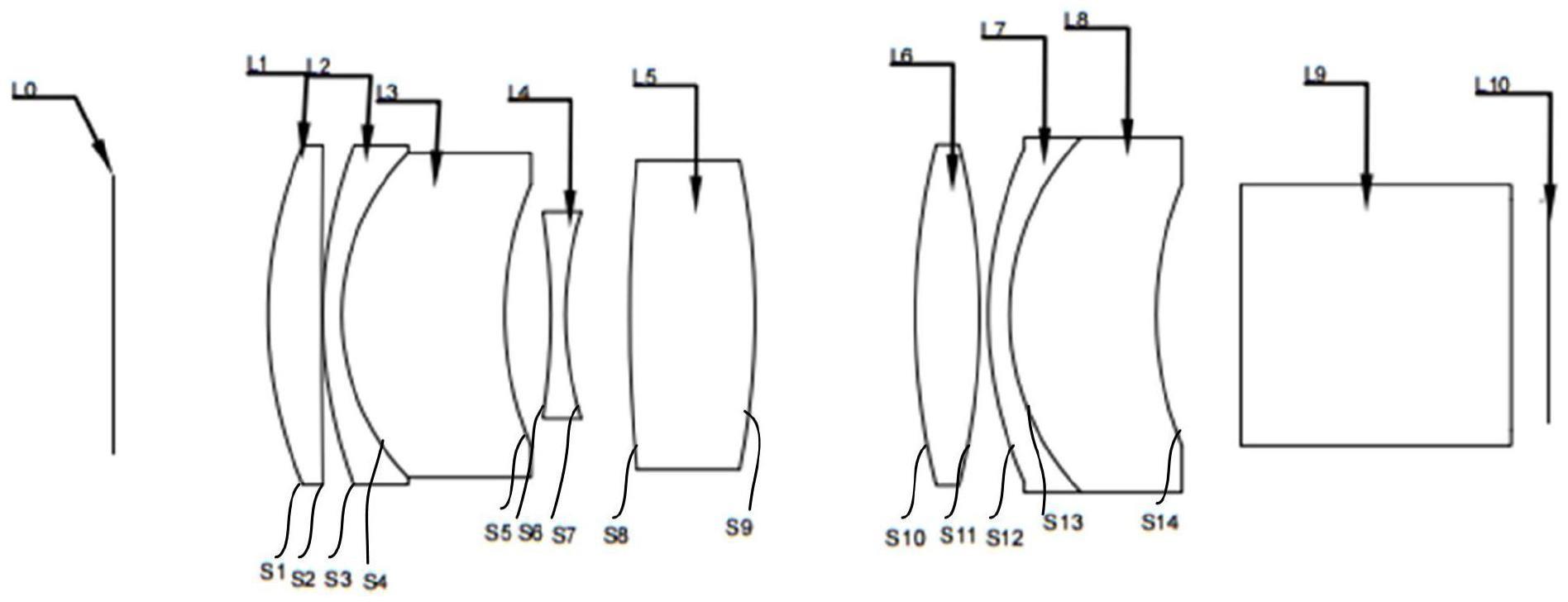
2、本发明实施例提供了一种光引擎投影镜头,适用于衍射光波导,包括沿光轴从物侧到像侧依次设置的光阑、第一透镜组、第二透镜组和成像模组;
3、所述光阑的通光尺寸与所述衍射光波导的入瞳尺寸相匹配,所述第一透镜组和第二透镜组均包括多个具有不同光焦度的透镜,且所述第一透镜组和第二透镜组中的透镜均为球面透镜。
4、进一步的,所述第一透镜组包括沿光轴从物侧到像侧依次设置的第一透镜、第二透镜、第三透镜和第四透镜,
5、所述第一透镜具有正光焦度,且靠近所述光阑一侧为凸面;所述第二透镜具有负光焦度,且靠近所述光阑一侧为凸面;所述第三透镜具有正光焦度,且靠近所述光阑一侧为凸面;所述第四透镜具有负光焦度,且靠近所述光阑一侧为凹面。
6、进一步的,所述第二透镜组包括沿光轴从物侧到像侧依次设置的第五透镜、第六透镜、第七透镜和第八透镜,
7、所述第五透镜具有正光焦度,且靠近所述光阑一侧为凸面;所述第六透镜具有正光焦度,且靠近所述光阑一侧为凸面;所述第七透镜具有负光焦度,且靠近所述光阑一侧为凸面;所述第八透镜具有正光焦度,且靠近所述光阑一侧为凸面。
8、进一步的,所述投影镜头的系统总长度和系统有效焦距的关系为:1.5<l/efl<2.5;其中,l表示系统总长度,efl表示系统有效焦距。
9、进一步的,所述系统有效焦距与所述第一透镜的焦距关系为:1<f1/efl<1.5;其中,efl表示系统有效焦距,f1表示所述第一透镜的焦距;
10、进一步的,所述系统有效焦距与所述第八透镜的焦距关系为:0.6<f8/efl<1.5;其中,efl表示系统有效焦距,f8表示所述第八透镜的焦距。
11、进一步的,所述系统有效焦距与系统后焦距的焦距关系为:0.4<bfl/efl<0.8;其中,efl表示系统有效焦距,bfl表示所述系统后焦距。
12、进一步的,述第二透镜和第三透镜胶合设置,所述第七透镜和第八透镜胶合设置。
13、进一步的,所述成像模组包括沿光轴从物侧到像侧依次设置的棱镜单元和成像单元;所述棱镜单元包括至少一面棱镜;所述成像单元为dlp模组、lcos模组、microled模组和lbs模组中的任意一个。
14、本发明实施例还提供了一种ar设备,采用如上任一项所述的光引擎投影镜头。
15、本发明实施例提供了一种光引擎投影镜头及ar设备,该投影镜头适用于衍射光波导,包括沿光轴从物侧到像侧依次设置的光阑、第一透镜组、第二透镜组和成像模组;所述光阑的通光尺寸与所述衍射光波导的入瞳尺寸相匹配,所述第一透镜组和第二透镜组均包括多个具有不同光焦度的透镜,且所述第一透镜组和第二透镜组中的透镜均为球面透镜。本发明实施例设置光阑通光尺寸与衍射光波导的入瞳尺寸相匹配,以使投影镜头能够匹配衍射光波导,此外,所述投影镜头中的透镜全部采用球面透镜,能够实现较高分辨率以及较小畸变,还具有生产成本低等特点。
技术特征:
1.一种光引擎投影镜头,适用于衍射光波导,其特征在于,包括沿光轴从物侧到像侧依次设置的光阑、第一透镜组、第二透镜组和成像模组;
2.根据权利要求1所述的光引擎投影镜头,其特征在于,所述第一透镜组包括沿光轴从物侧到像侧依次设置的第一透镜、第二透镜、第三透镜和第四透镜;
3.根据权利要求2所述的光引擎投影镜头,其特征在于,所述第二透镜组包括沿光轴从物侧到像侧依次设置的第五透镜、第六透镜、第七透镜和第八透镜;
4.根据权利要求3所述的光引擎投影镜头,其特征在于,所述投影镜头的系统总长度和系统有效焦距的关系为:1.5<l/efl<2.5;其中,l表示系统总长度,efl表示系统有效焦距。
5.根据权利要求3所述的光引擎投影镜头,其特征在于,所述系统有效焦距与所述第一透镜的焦距关系为:1<f1/efl<1.5;其中,efl表示系统有效焦距,f1表示所述第一透镜的焦距。
6.根据权利要求3所述的光引擎投影镜头,其特征在于,所述系统有效焦距与所述第八透镜的焦距关系为:0.6<f8/efl<1.5;其中,efl表示系统有效焦距,f8表示所述第八透镜的焦距。
7.根据权利要求3所述的光引擎投影镜头,其特征在于,所述系统有效焦距与系统后焦距的焦距关系为:0.4<bfl/efl<0.8;其中,efl表示系统有效焦距,bfl表示所述系统后焦距。
8.根据权利要求3所述的光引擎投影镜头,其特征在于,所述第二透镜和第三透镜胶合设置,所述第七透镜和第八透镜胶合设置。
9.根据权利要求1所述的光引擎投影镜头,其特征在于,所述成像模组包括沿光轴从物侧到像侧依次设置的棱镜单元和成像单元;所述棱镜单元包括至少一面棱镜;所述成像单元为dlp模组、lcos模组、microled模组和lbs模组中的任意一个。
10.一种ar设备,其特征在于,采用如权利要求1~9任一项所述的光引擎投影镜头。
技术总结
本发明公开了一种光引擎投影镜头及AR设备,该投影镜头适用于衍射光波导,包括沿光轴从物侧到像侧依次设置的光阑、第一透镜组、第二透镜组和成像模组;所述光阑的通光尺寸与所述衍射光波导的入瞳尺寸相匹配,所述第一透镜组和第二透镜组均包括多个具有不同光焦度的透镜,且所述第一透镜组和第二透镜组中的透镜均为球面透镜。本发明设置光阑通光尺寸与衍射光波导的入瞳尺寸相匹配,以使投影镜头能够匹配衍射光波导,此外,所述投影镜头中的透镜全部采用球面透镜,能够实现较高分辨率以及较小畸变,还具有生产成本低等特点。
技术研发人员:朱良富,朱以胜
受保护的技术使用者:深圳市光途显示科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!