一种多工位曝光设备及曝光方法与流程
本发明涉及一种光伏产品加工领域,尤其是应用于光伏产品的多工位曝光设备及曝光方法。
背景技术:
1、目前,在制作光伏电池片栅线时,主要采用银浆丝网印刷技术或者铜电镀工艺。银浆丝网印刷技术成本高,效率产能低,同时栅线的导电性及电池能效转换相对偏低,使得铜电镀工艺更受关注。
2、铜电镀工艺包括沉积种子层、图形化、铜电镀、后处理四大步骤,其中图形化是铜电镀工艺中比较重要的环节,采用曝光工艺在基底上生成图形。当前曝光工艺中,主要包括数字扫描方式和掩膜投影方式,数字扫描式光刻机能够满足铜电镀栅线的工艺需求,但是由于数字扫描方式中,每个光学镜头的出光宽度小,需要的零部件多,做更精细的栅线时,需要更高解析的配置,成本高,工作过程扫描速度有限,加工效率受限。光伏产品基板相对于pcb板而言,尺寸相对固定,料号资料较少变更,基本是同样尺寸的基板做同样规格的栅线,在进行图形化时所需的掩膜版相对固定,数字扫描式光刻机很难发挥出其最大优势。
技术实现思路
1、本发明所要解决的技术问题是提供一种高产能的多工位曝光设备及曝光方法。
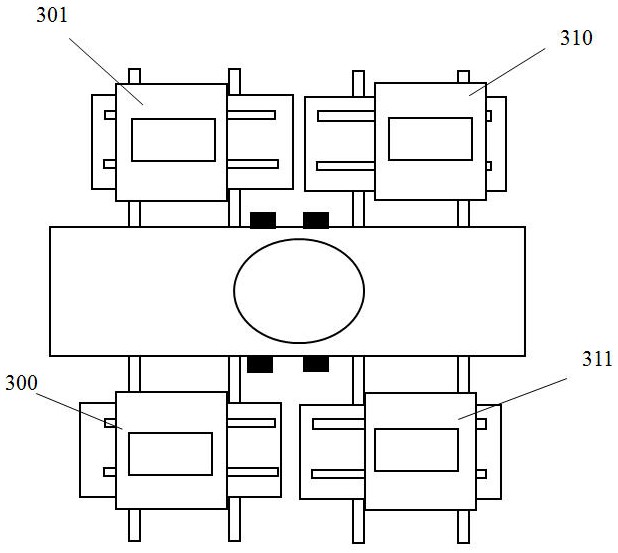
2、为了解决上述问题,本发明提供了一种所述多工位曝光设备,包括基座和支撑架,其还包括多工位运动平台、曝光系统和对位系统,所述多工位运动平台设置于基座,所述支撑架位于所述基座中间位置,设置有曝光系统,所述多工位运动平台包括至少两组导轨及沿所述导轨滑动设置的工作台,所述至少两组导轨平行设置或者垂直设置,其中一组导轨设置两个工作台,另一组导轨至少设置一个工作台,所述曝光系统包括光源和掩膜装置,工件经对位系统对位后,至曝光系统进行掩膜曝光。
3、进一步的,所述两组导轨平行设置时,所述工作台包括x向运动机构和承载平台,所述x向运动机构设置于所述导轨,所述承载平台设置于所述x向运动机构。
4、进一步的,所述承载平台和所述x向运动机构设置有纠偏机构,调整工件的姿态。
5、进一步的,其中一组导轨工作台处于x向最大行程处和另一组导轨工作台处于x向最小行程处时,两工作台之间具有间隙,所述工作台x向最大形程和x向最小行程根据所述工作台的重心位于相对设置的对应导轨之间设定。
6、进一步的,所述两组导轨均设置两个工作台 。
7、进一步的,所述对位系统包括至少两组对位相机,两组对位相机分别设置于支撑架y向的两端,所述对位相机固定设置于中间位置,对应于相同侧的工作台;或者对位相机固定设置于x向两端,分别对应于相同侧的工作台;或者所述对位相机滑动设置。
8、进一步的,所述对位系统在工件运动过程中获取工件的位置信息,并根据对位系统抓取的图像时的位置和预设位置之间的误差对获取的位置信息进行校正。
9、进一步的,所述多工位曝光设备还设置有移栽装置,所述移栽装置包括工件对位装置、工件抓取装置、工件暂存装置和所述对位系统,所述工件对位装置设置有纠偏平台,所述工件置于所述纠偏平台,所述对位系统对纠偏平台上的工件进行对位,所述纠偏平台依据对位结果对工件进行精定位,所述工件抓取装置将精定位的工件转移至工件暂存装置,待工作台回到上下料工位时,将工件转移至工作台相应位置。
10、上述多工位曝光设备的曝光方法,所述两组导轨平行设置时,工作台依次通过y方向和x方向运动移动至固定的曝光系统下方进行曝光操作,其中一个导轨的工作台退回至x方向最大行程处时,另一导轨的工作台移动至x方向最小行程处进行对位曝光操作;所述至少两组导轨垂直设置时,工作台依次通过y方向或x方向运动移动至固定的曝光系统下方进行曝光操作。
11、上述工位曝光设备的另一曝光方法,其特征在于:所述两组导轨平行设置时,工作台依次通过y方向和x方向运动移动至固定的曝光系统下方进行曝光操作,其中一个导轨的工作台退回至x方向最大行程处时,另一导轨的工作台移动至x方向最小行程处进行曝光操作,所述工作台在进行y向运动过程中进行对位到达曝光等待位置或者在移栽装置中进行对位。
12、与现有技术相比,所述多工位曝光设备采用固定曝光镜头掩膜曝光的方式,缩短了曝光所需时间,增加了镜头的稳定性。其中一个导轨的工作台退回至x方向最大行程处时,另一导轨的工作台移动至x方向最小行程处进行对位曝光操作,或者其中一个导轨的工作台退回至x方向最大行程处时,另一导轨的工作台移动至x方向最小行程处进行曝光操作,多个工作台有序交替运动,互不干扰,各工序有序配合,缩短交互等待时间,充分利用曝光时间短的特性,最大化发挥曝光系统的产能。
技术特征:
1.一种所述多工位曝光设备,包括基座和支撑架,其特征在于:其还包括多工位运动平台、曝光系统和对位系统,所述多工位运动平台设置于基座,所述支撑架位于所述基座中间位置,设置有曝光系统,所述多工位运动平台包括至少两组导轨及沿所述导轨滑动设置的工作台,所述至少两组导轨平行设置或者垂直设置,其中一组导轨设置两个工作台,另一组导轨至少设置一个工作台,所述曝光系统包括光源和掩膜装置,工件经对位系统对位后,至曝光系统进行掩膜曝光。
2.根据权利要求1所述的多工位曝光设备,其特征在于:所述两组导轨平行设置时,所述工作台包括x向运动机构和承载平台,所述x向运动机构设置于所述导轨,所述承载平台设置于所述x向运动机构。
3.根据权利要求2所述的多工位曝光设备,其特征在于:所述承载平台和所述x向运动机构设置有纠偏机构,调整工件的姿态。
4.根据权利要求2所述的多工位曝光设备,其特征在于:其中一组导轨工作台处于x向最大行程处和另一组导轨工作台处于x向最小行程处时,两工作台之间具有间隙,所述工作台x向最大形程和x向最小行程根据所述工作台的重心位于相对设置的对应导轨之间设定。
5.根据权利要求2所述的多工位曝光设备,其特征在于:所述两组导轨均设置两个工作台 。
6.根据权利要求2所述的多工位曝光设备,其特征在于:所述对位系统包括至少两组对位相机,两组对位相机分别设置于支撑架y向的两端,所述对位相机固定设置于中间位置,对应于相同侧的工作台;或者对位相机固定设置于x向两端,分别对应于相同侧的工作台;或者所述对位相机滑动设置。
7.根据权利要求1所述的多工位曝光设备,其特征在于:所述对位系统在工件运动过程中获取工件的位置信息,并根据对位系统抓取的图像时的位置和预设位置之间的误差对获取的位置信息进行校正。
8.根据权利要求1所述的多工位曝光设备,其特征在于:所述多工位曝光设备还设置有移栽装置,所述移栽装置包括工件对位装置、工件抓取装置、工件暂存装置和所述对位系统,所述工件对位装置设置有纠偏平台,所述工件置于所述纠偏平台,所述对位系统对纠偏平台上的工件进行对位,所述纠偏平台依据对位结果对工件进行精定位,所述工件抓取装置将精定位的工件转移至工件暂存装置,待工作台回到上下料工位时,将工件转移至工作台相应位置。
9.根据权利要求1-7的任一多工位曝光设备的曝光方法,其特征在于:所述两组导轨平行设置时,工作台依次通过y方向和x方向运动移动至固定的曝光系统下方进行曝光操作,其中一个导轨的工作台退回至x方向最大行程处时,另一导轨的工作台移动至x方向最小行程处进行对位曝光操作;所述至少两组导轨垂直设置时,工作台依次通过y方向或x方向运动移动至固定的曝光系统下方进行曝光操作。
10.根据权利要求1-7的任一多工位曝光设备的曝光方法,其特征在于:所述两组导轨平行设置时,工作台依次通过y方向和x方向运动移动至固定的曝光系统下方进行曝光操作,其中一个导轨的工作台退回至x方向最大行程处时,另一导轨的工作台移动至x方向最小行程处进行曝光操作,所述工作台在进行y向运动过程中进行对位到达曝光等待位置或者在移栽装置中进行对位。
技术总结
本发明涉及一种所述多工位曝光设备及曝光方法,包括基座和支撑架,其特征在于:其还包括多工位运动平台、曝光系统和对位系统,所述多工位运动平台设置于基座,所述支撑架位于所述基座中间位置,设置有曝光系统,所述多工位运动平台包括至少两组导轨及沿所述导轨滑动设置的工作台,所述至少两组导轨平行设置或者垂直设置,其中一组导轨设置两个工作台,另一组导轨至少设置一个工作台,所述曝光系统包括光源和掩膜装置,工件经对位系统对位后,至曝光系统进行掩膜曝光。通过多个工作台有序交替运动,互不干扰,各工序有序配合,缩短交互等待时间,充分利用曝光时间短的特性,最大化发挥曝光系统的产能。
技术研发人员:胥涛棚,马运军,蔡志兵,张雷
受保护的技术使用者:源卓微纳科技(苏州)股份有限公司
技术研发日:
技术公布日:2024/10/24
- 还没有人留言评论。精彩留言会获得点赞!