一种光刻设备晶圆传控方法及光刻设备与流程
本发明涉及系统控制,尤其涉及一种光刻设备晶圆传控方法及光刻设备。
背景技术:
1、在半导体集成电路制造工艺中,产能是对光刻设备性能评价的核心标准之一,光刻设备中晶圆的传控是影响产能的一个重要因素,晶圆的传控是指晶圆于光刻设备内进行不同工作位之间的传输与控制,因此如何缩短晶圆的传控时间,进而加快晶圆的流转速度是能够实现产能提高的必要条件之一。
2、现有技术中晶圆的传控过程包括:首先机械臂将晶圆从片盒中取出并置于预对准位,接着再将预对准后的晶圆置于工作台上进行曝光,最后将曝光后的晶圆置于片盒中,由此完成晶圆于光刻设备内的整个传控过程。而在整个传控过程中,晶圆按照既定的传控顺序于光刻设备内的不同工作位上接次传输,也即,晶圆于工作位上的传控顺序是固定的,而若传控过程中的某个工作位出现故障或者晶圆自身出现问题等原因需将晶圆召回等操作(即,需将晶圆置于片盒中),则需要由工作人员手动输入指令以停止晶圆的传输并取回晶圆,从而存在操作不便的问题。同时,在晶圆的召回过程中,晶圆按照既定的传控顺序进行传输,若晶圆按照传控顺序的下一个工作位存放有其余晶圆,则需要等到其余晶圆传输后,才能将该晶圆传输至下一个工作位,从而存在不必要的等待时间。举例而言,若需要将位于工作台上的晶圆进行召回,按照既定的传控顺序则需要机械臂将工作台上存放的晶圆传输至片盒内,若此时机械臂上存放有其余晶圆,则需等待机械臂将其所存放的晶圆传输完毕后,才能由机械臂将工作台上存放的晶圆传输至片盒内,从而存在不必要的等待时间,并基于此导致晶圆的传控时间增长,进而影响光刻设备的产能。
3、有鉴于此,有必要对现有技术中的光刻设备传控方法予以改进,以解决上述问题。
技术实现思路
1、本发明的目的在于解决现有技术中由于工作人员手动输入指令以执行相应操作(例如,晶圆召回等操作)所存在的操作不便的问题,同时,还解决由于按照既定的传控顺序取回晶圆而下一个工作位存放有其余晶圆所存在的不必要等待时间,并由此造成的传控时间较长的问题。
2、为实现上述目的,本发明提供了一种光刻设备晶圆传控方法,包括:
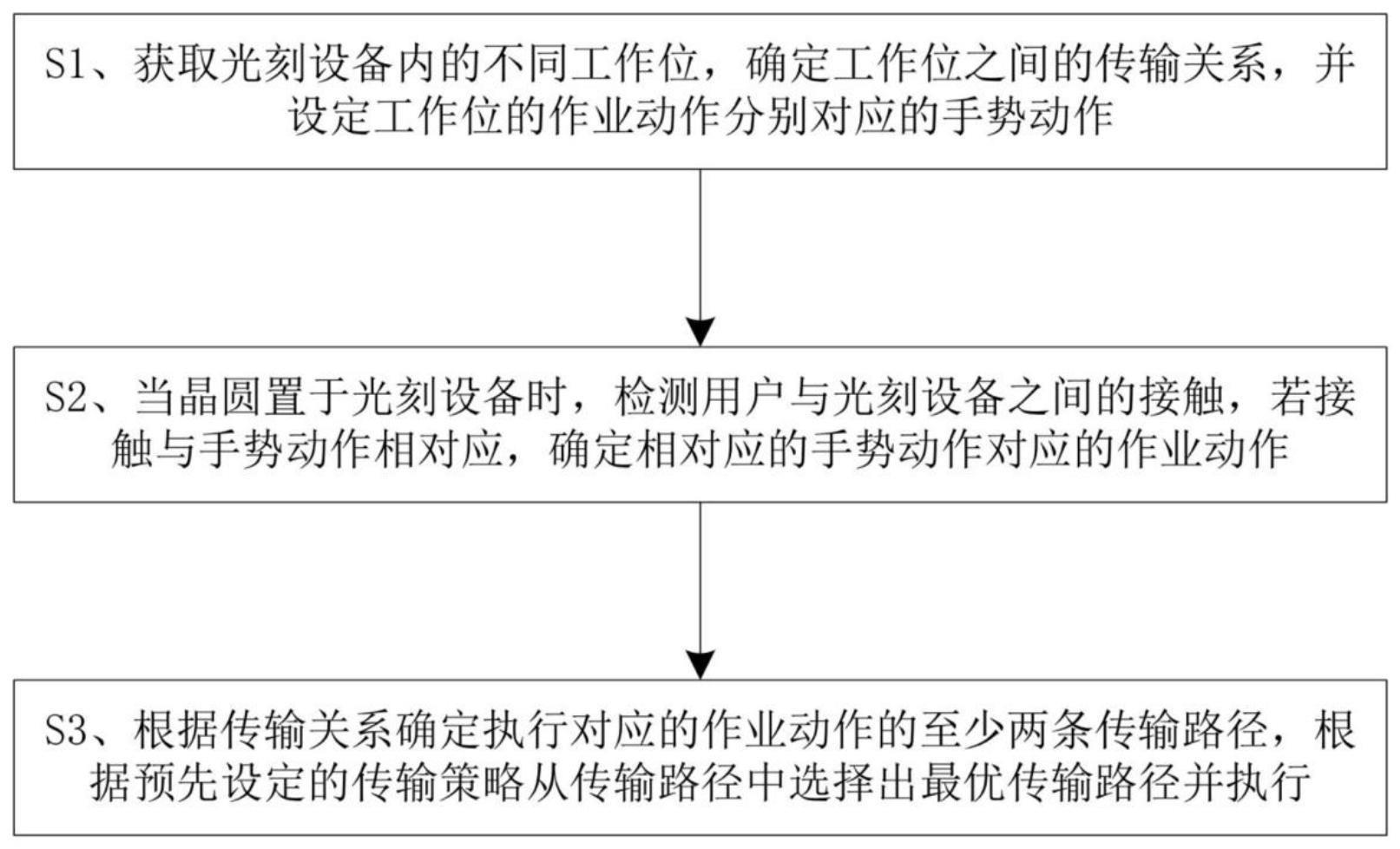
3、获取光刻设备内的不同工作位,确定工作位之间的传输关系,并设定工作位的作业动作分别对应的手势动作;
4、当晶圆置于光刻设备时,检测用户与光刻设备之间的接触,若所述接触与手势动作相对应,确定相对应的手势动作对应的作业动作;
5、根据所述传输关系确定执行对应的作业动作的至少两条传输路径,根据预先设定的传输策略从所述传输路径中选择出最优传输路径并执行。
6、作为本发明的进一步改进,所述光刻设备内的不同工作位包括:片盒、机械臂、预对准位以及工作台;
7、所述片盒用于放置晶圆,所述机械臂用于晶圆于片盒、预对准位以及工作台之间的传输,所述预对准位用于对晶圆进行预对准,所述工作台用于对晶圆进行曝光。
8、作为本发明的进一步改进,所述工作位的作业动作包括上片动作与下片动作,所述手势动作包括上片手势与下片手势;
9、其中,所述手势动作由语音控制或者机械学习予以实现。
10、作为本发明的进一步改进,不同工作位分别对应的手势动作一致或者不一致。
11、作为本发明的进一步改进,所述传输关系包括:光刻设备内的工作位与相邻的工作位之间的相互传输。
12、作为本发明的进一步改进,所述预先设定的传输策略根据光刻设备内的不同工作位对应的作业时间与作业状态予以确定,并根据所述作业时间与作业状态计算传输路径对应的耗时,将耗时最短的传输路径选择为最优传输路径。
13、作为本发明的进一步改进,所述机械臂包括:第一机械臂与第二机械臂;
14、所述第一机械臂用于晶圆于片盒与预对准位之间以及片盒与工作台之间的传输,所述第二机械臂用于晶圆于预对准位与工作台之间的传输。
15、作为本发明的进一步改进,当晶圆置于第二机械臂时,若用户与光刻设备之间的接触相对应的手势动作为第一机械臂的下片动作,确定执行第一机械臂的下片动作的至少两条传输路径,根据传输策略将传输路径中耗时最短的传输路径选择为最优传输路径,并基于所述最优传输路径执行第一机械臂的下片动作。
16、作为本发明的进一步改进,所述片盒包括:第一片盒与第二片盒;
17、所述第一片盒用于放置未预对准和/或未曝光的晶圆,所述第二片盒用于放置预对准后且曝光后的晶圆。
18、基于相同发明思想,本发明还揭示了一种光刻设备,
19、使用如上述任一项所述的光刻设备晶圆传控方法对晶圆进行传控。
20、与现有技术相比,本发明的有益效果是:
21、获取光刻设备内的不同工作位,确定工作位之间的传输关系,并设定工作位的作业动作分别对应的手势动作,以在后续基于手势动作执行对应的作业动作,从而简化用户对光刻设备的指令输入,以解决现有技术中用户(例如,工作人员)手动输入指令以执行相应操作(例如,晶圆召回等操作)所存在的操作不便的问题;当晶圆置于光刻设备时,检测用户与光刻设备之间的接触,若接触与手势动作相对应,确定相对应的手势动作对应的作业动作,根据传输关系确定执行对应的作业动作的至少两条传输路径,根据预先设定的传输策略从传输路径中选择出最优传输路径并执行,以将耗时最短的传输路径选择为最优传输路径,从而缩短晶圆的传控时间,进而解决现有技术中由于按照既定的传控顺序取回晶圆而下一个工作位存放有其余晶圆所存在的不必要等待时间,并由此造成的传控时间较长的问题。
技术特征:
1.一种光刻设备晶圆传控方法,其特征在于,包括:
2.根据权利要求1所述的光刻设备晶圆传控方法,其特征在于,所述光刻设备内的不同工作位包括:片盒、机械臂、预对准位以及工作台;
3.根据权利要求2所述的光刻设备晶圆传控方法,其特征在于,所述工作位的作业动作包括上片动作与下片动作,所述手势动作包括上片手势与下片手势;
4.根据权利要求3所述的光刻设备晶圆传控方法,其特征在于,不同工作位分别对应的手势动作一致或者不一致。
5.根据权利要求2所述的光刻设备晶圆传控方法,其特征在于,所述传输关系包括:光刻设备内的工作位与相邻的工作位之间的相互传输。
6.根据权利要求3所述的光刻设备晶圆传控方法,其特征在于,所述预先设定的传输策略根据光刻设备内的不同工作位对应的作业时间与作业状态予以确定,并根据所述作业时间与作业状态计算传输路径对应的耗时,将耗时最短的传输路径选择为最优传输路径。
7.根据权利要求6所述的光刻设备晶圆传控方法,其特征在于,所述机械臂包括:第一机械臂与第二机械臂;
8.根据权利要求7所述的光刻设备晶圆传控方法,其特征在于,当晶圆置于第二机械臂时,若用户与光刻设备之间的接触相对应的手势动作为第一机械臂的下片动作,确定执行第一机械臂的下片动作的至少两条传输路径,根据传输策略将传输路径中耗时最短的传输路径选择为最优传输路径,并基于所述最优传输路径执行第一机械臂的下片动作。
9.根据权利要求2所述的光刻设备晶圆传控方法,其特征在于,所述片盒包括:第一片盒与第二片盒;
10.一种光刻设备,其特征在于,
技术总结
本发明提供了一种光刻设备晶圆传控方法及光刻设备,该方法包括:获取光刻设备内的不同工作位,确定工作位之间的传输关系,并设定工作位的作业动作分别对应的手势动作;当晶圆置于光刻设备时,检测用户与光刻设备之间的接触,若接触与手势动作相对应,确定相对应的手势动作对应的作业动作;根据传输关系确定执行对应的作业动作的至少两条传输路径,根据预先设定的传输策略从传输路径中选择出最优传输路径并执行。通过本发明,简化了用户对光刻设备的指令输入,并实现了晶圆耗时最短的传控,以进一步保证光刻设备的产能。
技术研发人员:张琪,符友银
受保护的技术使用者:新毅东(上海)科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!