一种泛半导体光刻机的飞拍寻靶对位装置及方法
本发明涉及半导体,特别是涉及一种泛半导体光刻机的飞拍寻靶对位装置及方法。
背景技术:
1、目前,泛半导体光刻机以uv(ultra violet, 紫外)光源为主,其广泛应用于光伏、led(light emitting diode, 发光二极管)、平板显示和半导体等领域,在进行pcb板对位时,现有技术大都先通过工业相机拍摄pcb(printed circuit board, 印制电路板)板靶标的图像,然后计算靶标的理论坐标和实际坐标之间的差值,最后根据差值调整pcb板的位置来进行对位,目前,获取pcb板靶标图像的方式主要为“静态拍摄”,所谓“静态拍摄”也称“固定拍摄”,是通过伺服电机驱动工业相机到靶标位置,保持相机与靶标之间的相对静止,再进行拍摄和图像处理,在相机拍摄时,对位系统由运动状态到静止状态,拍摄完成后,再由静止状态变为运动状态,在连续拍摄过程中,需要多次“点位启停”,对位效率不高;同时,启停也会造成刚性冲击而产生误差,启停次数越多,误差叠加越大,靶标识别精度越低,从而对位精度不高。
2、现有技术公开一种pcb对位孔加工方法、自动打孔设备、pcb及电子设备,包括获取对位孔加工请求,所述对位孔加工请求包括目标加工参数;控制摄像头对待加工pcb的每一局部靶标区域进行拍摄,获取每一所述局部靶标区域对应的局部靶标图像;基于每一所述局部靶标图像和所述目标加工参数,将所述待加工pcb中的内层芯板靶标和外层芯板靶标进行对准,确定目标对位位置;基于所述目标对位位置,在所述待加工pcb上加工目标对位孔,从而从局部分析内层芯板靶标和外层芯板靶标是否对准,最后基于目标对位位置,在待加工pcb上加工目标对位孔,从而完成pcb对位,现有技术采用静态拍摄获取靶标图像,在需要拍摄多个靶标图像时,必须多次耗费大量时间校准摄像头与靶标位置,效率不高,且多次校准需多次启停,启停会带来一定误差,多次启停会使靶标的识别精度降低,从而对位精度不高。
技术实现思路
1、本发明的目的是克服现有技术存在的缺陷,提供一种泛半导体光刻机的飞拍寻靶对位装置及方法,本发明能够提高pcb板的对位效率和精度。
2、为了实现上述目的,本发明提供了一种泛半导体光刻机的飞拍寻靶对位装置,包括:双相机运动模块、平台运动模块、双压电促动器模块、曝光模块、图像处理模块和控制器,所述双相机运动模块装设在所述平台运动模块上,所述双压电促动器模块与所述双相机运动模块连接,所述曝光拍摄模块装设在所述双相机运动模块上,所述图像处理模块的信号输出端与所述控制器的信号输入端连接,所述控制器的信号输出端与所述双相机运动模块、所述平台运动模块、所述双压电促动器模块和所述曝光模块输入端连接。
3、进一步地,该装置还包括:压电促动器、单自由度柔顺机构和相机支架(9),所述压电促动器与所述单自由度柔顺机构连接,所述相机支架固定在所述单自由度柔顺机构上,所述曝光拍摄模块安装在所述相机支架(9)上。
4、本发明还提供一种泛半导体飞拍寻靶对位方法,包括:
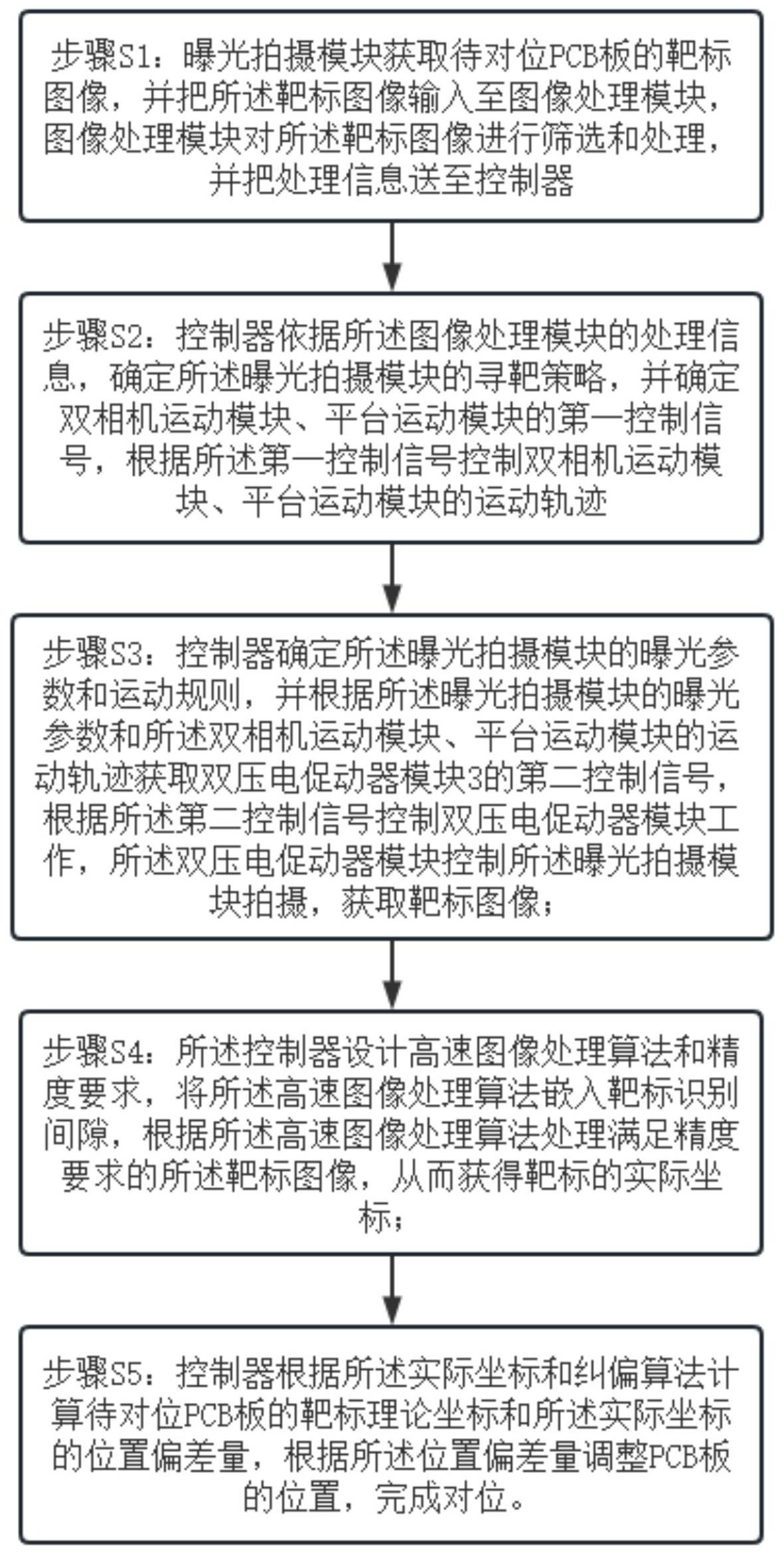
5、步骤s1:曝光拍摄模块获取待对位pcb板的靶标图像,并把所述靶标图像输
6、入至图像处理模块,图像处理模块对所述靶标图像进行筛选和处理,并把处理信息送至控制器;
7、步骤s2:控制器依据所述图像处理模块的处理信息,确定所述曝光拍摄模块
8、的寻靶策略,并确定双相机运动模块、平台运动模块的第一控制信号,根据所述第一控制信号控制双相机运动模块、平台运动模块的运动轨迹;
9、步骤s3:控制器确定所述曝光拍摄模块的曝光参数和运动规则,并根据所述
10、曝光拍摄模块的曝光参数和所述双相机运动模块、平台运动模块的运动轨迹获取双压电促动器模块3的第二控制信号,根据所述第二控制信号控制双压电促动器模块工作,所述双压电促动器模块控制所述曝光拍摄模块拍摄,获取靶标图像;
11、步骤s4:所述控制器设计高速图像处理算法和精度要求,将所述高速图像处
12、理算法嵌入靶标识别间隙,根据所述高速图像处理算法处理满足精度要求的所述靶标图像,从而获得靶标的实际坐标;
13、步骤s5:控制器根据所述实际坐标和纠偏算法计算待对位pcb板的靶标
14、理论坐标和所述实际坐标的位置偏差量,根据所述位置偏差量调整pcb板的位置,完成对位。
15、进一步地,步骤s1中所述处理信息包括获取待对位pcb板的靶标数量和每个所述靶标的理论坐标,所述靶标数量由所述待对位的pcb板提供。
16、进一步地,步骤s2中所述运动轨迹包括单相机工作模式和双相机工作模式,所述单相机工作模式的工作轨迹为蛇形轨迹,所述双相机工作模式为往返轨迹,
17、所述单相机工作模式满足:>;所述双相机工作模式不满足:>,
18、其中表示相邻靶标的距离,l表示安全距离。
19、进一步地,所述曝光规则包括曝光时间t。
20、进一步地,所述运动规则包括相机从原点到达第一个靶标坐标位置之前的稳定速度和从零加速至所述稳定速度的切换加速度、相机到达指定位置之后的稳定拍摄速度和从所述稳定速度切换为所述稳定拍摄速度的切换加速度、相机从一个靶标坐标位置到达与所述靶标相邻的下一个靶标坐标位置的稳定间隙速度和从稳定拍摄速度切换为所述稳定间隙速度的切换加速度、相机从靶标坐标位置回到原点的速度。
21、进一步地,所述稳定速度>所述稳定间隙速度>所述稳定拍摄速度。
22、进一步地,所述稳定速度=所述速度,所述切换加速度=所述切换加速度=所述切换加速度。
23、进一步地,步骤s4中所述精度要求为:<,
24、其中,由下式确定:
25、;
26、由下式确定:
27、;
28、表示伺服电机在曝光时间t内移动的距离;表示符合精度要求的最大图像拖影距离;表示相机拍摄靶标时的稳定速度;t表示曝光时间;表示相机坐标与实际坐标的转换系数;表示精度要求像素。
29、本发明与现有技术相比,其有益效果在于:
30、本发明通过设计曝光拍摄模块的曝光参数和运动规则,保证了相机能够在曝光时间内匀速运动并对靶标位置进行拍摄,还保证了相机在寻靶完成之后能够迅速返回原点,避免了因静态拍摄而需要多次启停对位系统而造成的耗费大量时间和误差的问题,提高了对位效率和精度;本发明还通过增加精度要求,将满足精度要求的靶标位置图像才进行处理,进一步提高了对位精度。
技术特征:
1.一种泛半导体光刻机的飞拍寻靶对位装置,其特征在于,包括:双相机运动模块(1)、平台运动模块(2)、双压电促动器模块(3)、曝光模块(4)、图像处理模块(5)和控制器(6),所述双相机运动模块(1)装设在所述平台运动模块(2)上,所述双压电促动器模块(3)与所述双相机运动模块(1)连接,所述曝光拍摄模块(4)装设在所述双相机运动模块(1)上,所述图像处理模块(5)的信号输出端与所述控制器(6)的信号输入端连接,所述控制器(6)的信号输出端与所述双相机运动模块(1)、所述平台运动模块(2)、所述双压电促动器模块(3)和所述曝光模块(4)输入端连接。
2.根据权利要求1所述的一种泛半导体光刻机的飞拍寻靶对位装置,其特征在于,还包括:压电促动器(7)、单自由度柔顺机构(8)和相机支架(9),所述压电促动器(7)与所述单自由度柔顺机构(8)连接,所述相机支架(9)固定在所述单自由度柔顺机构(8)上,所述曝光拍摄模块(4)安装在所述相机支架(9)上。
3.一种泛半导体光刻机的飞拍寻靶对位方法,其特征在于,包括:
4.根据权利要求3所述的一种泛半导体光刻机的飞拍寻靶对位方法,其特征在于,步骤s1中所述处理信息包括获取待对位pcb板的靶标数量和每个所述靶标的理论坐标,所述靶标数量由所述待对位的pcb板提供。
5.根据权利要求3所述的一种泛半导体光刻机的飞拍寻靶对位方法,其特征在于,步骤s2中所述运动轨迹包括单相机工作模式和双相机工作模式,所述单相机工作模式的工作轨迹为蛇形轨迹,所述双相机工作模式为往返轨迹,
6.根据权利要求3所述的一种泛半导体光刻机的飞拍寻靶对位方法,其特征在于,步骤s3中所述曝光规则包括曝光时间t。
7.根据权利要求3所述的一种泛半导体光刻机的飞拍寻靶对位方法,其特征在于,所述运动规则包括相机从原点到达第一个靶标坐标位置之前的稳定速度和从零加速至所述稳定速度的切换加速度、相机到达指定位置之后的稳定拍摄速度和从所述稳定速度切换为所述稳定拍摄速度的切换加速度、相机从一个靶标坐标位置到达与所述靶标相邻的下一个靶标坐标位置的稳定间隙速度和从稳定拍摄速度切换为所述稳定间隙速度的切换加速度、相机从靶标坐标位置回到原点的速度。
8.根据权利要求5所述的一种泛半导体光刻机的飞拍寻靶对位方法,其特征在于,所述稳定速度>所述稳定间隙速度>所述稳定拍摄速度。
9.根据权利要求6所述的一种泛半导体光刻机的飞拍寻靶对位方法,其特征在于,所述稳定速度=所述速度,所述切换加速度=所述切换加速度=所述切换加速度。
10.根据权利要求6所述的一种泛半导体光刻机的飞拍寻靶对位方法,其特征在于,步骤s4中所述精度要求为:<,
技术总结
本发明涉及半导体技术领域,公开了一种泛半导体光刻机的飞拍寻靶对位装置及方法,包括:获取PCB板的靶标数量和每个靶标的理论坐标,根据靶标数量和每个靶标的理论坐标确定相机的寻靶策略;根据每个靶标的理论坐标和寻靶策略确定伺服电机的第一控制信号,第一控制信号控制相机和平台的运动轨迹;根据曝光参数和运动规则获取压电促动器的第二控制信号,压电控制器用于控制相机拍摄,获取靶标图像;将高速图像处理算法嵌入靶标识别间隙,根据高速图像处理算法处理满足精度要求的靶标图像,从而获得靶标的实际坐标;计算靶标理论坐标和所述实际坐标的位置偏差量,根据位置偏差量调整PCB板的位置,完成对位,本发明提高了PCB板的对位精度和效率。
技术研发人员:王瑞洲,许定贤
受保护的技术使用者:广东工业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!