一种光缆智能跳纤机械手的制作方法
本技术涉及机械手,具体为一种光缆智能跳纤机械手。
背景技术:
1、现有申请号为cn112388672a的一种智能机械手臂,具体公开了包括底盘座,所述底盘座的上端表面中间位置固设有电动机一,所述电动机一的上端表面中间位置固设有套筒杆柱,所述套筒杆柱的上端表面固设有端连部,所述端连部的上端中间位置固设有衔接插杆,所述衔接插杆的外表面中间位置设置有横齿杆一,所述横齿杆一的外表面两侧均安装有一号辅动件;本发明能够根据具体使用需求对机械手臂进行旋转调节,扩大机械手臂的运作范围,可利用转轴珠与内侧壁的点面式接触方式,减少局部接触面积,降低部件之间的摩擦力,使得端连部与衔接插杆之间的相对滑动更加流畅,避免长期使用致使内部结构发生卡固现象,实现局部的前后倾斜调节,达到对试样的多方位多角度加工。现有用于光缆智能跳纤的机械手,光缆体积较小,手臂为防止其掉落,则手臂的运动幅度预计速度较慢,而由于一些场地较小或者对战的棋局较为较小,则需要编程人员更换手臂的抓取移动幅度,或者更换不同型号手臂长度的机械手臂,其较大的增加了机械手臂的使用成本,且操作效率较差,为此我们提出了一种光缆智能跳纤机械手。
技术实现思路
1、本实用新型的目的在于提供一种光缆智能跳纤机械手,以解决上述背景技术中提出的用于光缆智能跳纤的机械手,光缆体积较小,手臂为防止其掉落,则手臂的运动幅度预计速度较慢,而由于一些场地较小或者对战的棋局较为较小,则需要编程人员更换手臂的抓取移动幅度,或者更换不同型号手臂长度的机械手臂,其较大的增加了机械手臂的使用成本,且操作效率较差的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种光缆智能跳纤机械手,包括底座,所述底座两端均固定安装有滑道,所述滑道内两侧均开设有滑槽,两个所述滑道之间设置有活动架,所述活动架两端均固定安装有滑座,所述滑座滑动设置在滑道内,所述滑座两侧均固定安装有卡块,所述卡块滑动设置在滑槽内。
3、所述底座顶部设置有两个对称分布的夹板,所述夹板设置有两组,每组所述夹板之间为间隔设置,相邻的两个所述夹板之间固定连接有连接板,所述连接板两端与两个夹板相连,所述夹板靠近滑座的一侧设置有调节机构,两侧的所述调节机构镜像分布,所述夹板两端均设置有棉套,两个同侧的所述棉套之间固定安装有横杆,还包括驱动机构,所述驱动机构安装在底座上且与活动架和横杆相连。
4、进一步地,所述底座上开设有若干均匀分布的安装孔,所述底座底部设置有减震垫。
5、进一步地,所述驱动机构包括底板,所述底板固定连接在底座上,所述底板上固定安装有支架一,所述支架一与底板之间可转动安装有丝杆,所述丝杆两端分别可转动安装在支架一与底板上,所述丝杆贯穿活动架且与活动架螺纹连接,所述支架一上固定安装有电机,所述电机的输出轴贯穿支架一并与丝杆固定连接。
6、进一步地,所述电机上安装有防尘罩。
7、进一步地,所述驱动机构还包括支架二,所述支架二固定连接在底座上,所述支架二上可转动安装有联动轴,所述联动轴贯穿支架二,所述联动轴下端固定安装有双向丝杆,所述双向丝杆贯穿两个横杆并与横杆螺纹连接,所述联动轴顶部与电机的输出轴之间安装有皮带机构。
8、进一步地,所述调节机构包括导向套、导杆和弹簧,所述导杆滑动设置在导向套内,所述导向套、导杆两端分别固连在夹板和滑座上,所述弹簧套设在导向套、导杆上且两端分别固定连接在夹板和滑座上。
9、与现有技术相比,本实用新型的有益效果是:本实用新型通过设置两个对称分布的夹板将其中的光缆进行固定,通过设置连接板来对多条光缆进行同步操作,通过在夹板靠近滑座的一侧设置调节机构,通过调节机构来对不同粗细的光缆进行固定,再通过驱动机构带动活动架沿着滑道的方向移动,从而通过调节光缆的位置来实现跳纤的动作。
技术特征:
1.一种光缆智能跳纤机械手,其特征在于,包括底座(1),所述底座(1)两端均固定安装有滑道(2),所述滑道(2)内两侧均开设有滑槽(3),两个所述滑道(2)之间设置有活动架(4),所述活动架(4)两端均固定安装有滑座(5),所述滑座(5)滑动设置在滑道(2)内,所述滑座(5)两侧均固定安装有卡块(6),所述卡块(6)滑动设置在滑槽(3)内;
2.根据权利要求1所述的一种光缆智能跳纤机械手,其特征在于:所述底座(1)上开设有若干均匀分布的安装孔,所述底座(1)底部设置有减震垫。
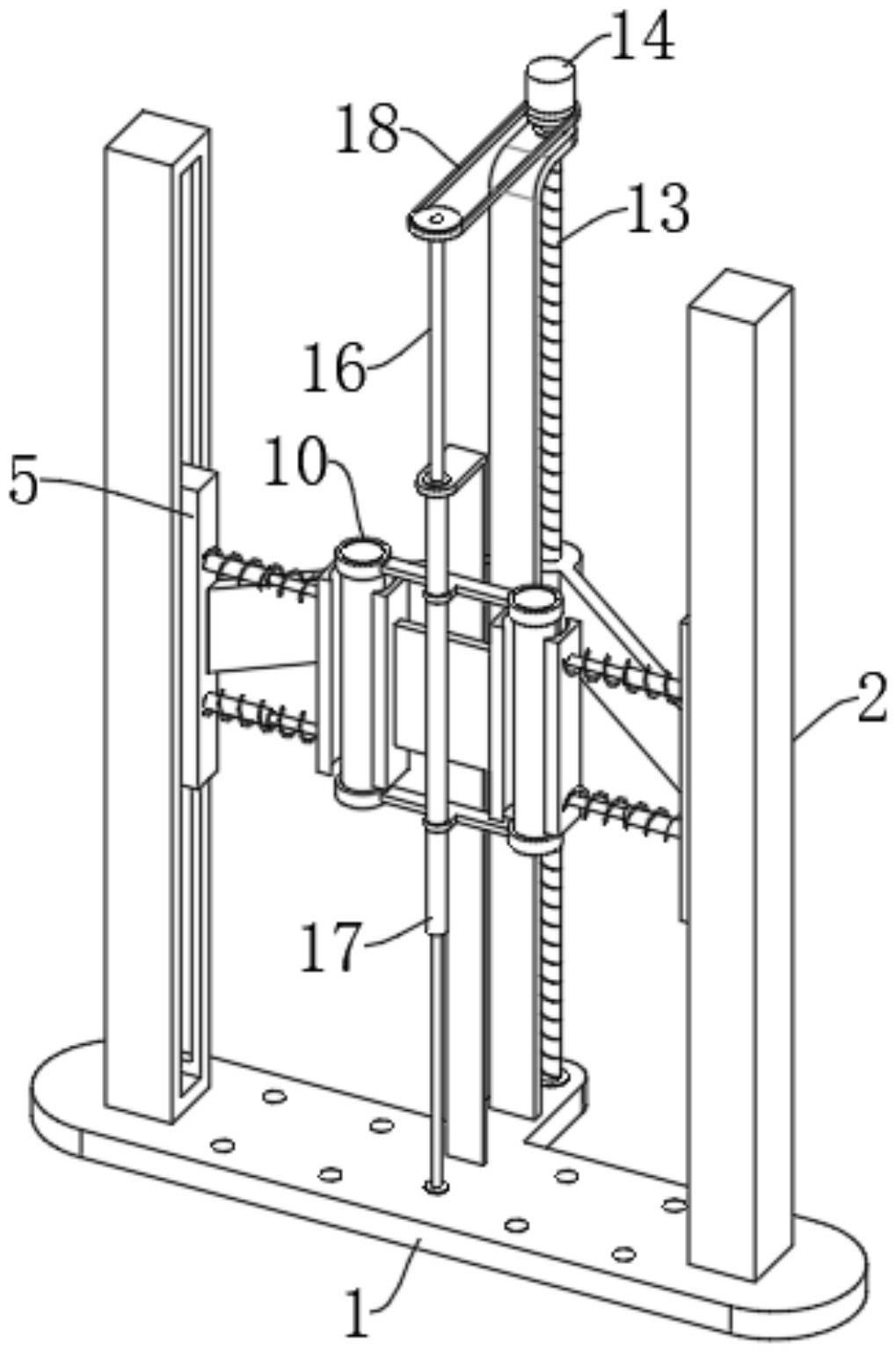
3.根据权利要求1所述的一种光缆智能跳纤机械手,其特征在于:所述驱动机构包括底板(11),所述底板(11)固定连接在底座(1)上,所述底板(11)上固定安装有支架一(12),所述支架一(12)与底板(11)之间可转动安装有丝杆(13),所述丝杆(13)两端分别可转动安装在支架一(12)与底板(11)上,所述丝杆(13)贯穿活动架(4)且与活动架(4)螺纹连接,所述支架一(12)上固定安装有电机(14),所述电机(14)的输出轴贯穿支架一(12)并与丝杆(13)固定连接。
4.根据权利要求3所述的一种光缆智能跳纤机械手,其特征在于:所述电机(14)上安装有防尘罩。
5.根据权利要求3所述的一种光缆智能跳纤机械手,其特征在于:所述驱动机构还包括支架二(15),所述支架二(15)固定连接在底座(1)上,所述支架二(15)上可转动安装有联动轴(16),所述联动轴(16)贯穿支架二(15),所述联动轴(16)下端固定安装有双向丝杆(17),所述双向丝杆(17)贯穿两个横杆(10)并与横杆(10)螺纹连接,所述联动轴(16)顶部与电机(14)的输出轴之间安装有皮带机构(18)。
6.根据权利要求1所述的一种光缆智能跳纤机械手,其特征在于:所述调节机构包括导向套(19)、导杆(20)和弹簧(21),所述导杆(20)滑动设置在导向套(19)内,所述导向套(19)、导杆(20)两端分别固连在夹板(7)和滑座(5)上,所述弹簧(21)套设在导向套(19)、导杆(20)上且两端分别固定连接在夹板(7)和滑座(5)上。
技术总结
本技术公开了机械手技术领域的一种光缆智能跳纤机械手,一种光缆智能跳纤机械手,包括底座,底座两端均固定安装有滑道,滑道内两侧均开设有滑槽,两个滑道之间设置有活动架,活动架两端均固定安装有滑座,滑座滑动设置在滑道内,相邻的两个夹板之间固定连接有连接板,连接板两端与两个夹板相连,夹板靠近滑座的一侧设置有调节机构,两侧的调节机构镜像分布,本技术通过设置两个对称分布的夹板将其中的光缆进行固定,通过设置连接板来对多条光缆进行同步操作,通过在夹板靠近滑座的一侧设置调节机构,通过调节机构来对不同粗细的光缆进行固定,再通过驱动机构带动活动架沿着滑道的方向移动,从而通过调节光缆的位置来实现跳纤的动作。
技术研发人员:黄育飞,冯晓磊
受保护的技术使用者:南通陆季智能制造科技有限公司
技术研发日:20230201
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!