一种基于三分法和遗传算法的数字全息自动聚焦成像方法
本发明涉及数字全息,尤其是涉及一种基于三分法和遗传算法的数字全息自动聚焦成像方法。
背景技术:
1、数字全息是一种干涉成像技术,其利用数字图像传感器(ccd或cmos)记录全息图,用计算机模拟光波的衍射传播过程来实现对物体的成像,具有全视场、无损伤、高精度、数字聚焦、可同时获得定量强度像和相位像等独特的优点。数字全息已被广泛用于活细胞定量成像、微观颗粒跟踪、mems检测等领域。特别是,离轴数字全息技术在生物学和生物医学等领域中引起了研究者们广泛的兴趣,这主要归功于该技术仅需一幅全息图便可恢复物体信息,提高了系统的测量效率,也降低了环境对多帧测量的影响,因此更适合对运动物体进行实时成像。
2、对于运动物体的跟踪观测和实时干预中的许多应用需要自动聚焦技术。如公开号为cn116719147a的发明通过以连续步进的方式改变传播距离的大小,重建一系列全息图,然后利用自动聚焦评价函数计算出最佳聚焦距离,该过程通常非常耗时。因此,如何保证不牺牲聚焦精度的条件下快速获取最佳聚焦距离是该技术亟需解决的问题之一。
3、传统自动聚焦方法具有以下共同特征:在寻找聚焦平面的过程中,步长为固定数值且数值较小,这导致聚焦曲线上的波峰或波谷附近的函数值差别不大,灵敏度低,测量精度不高。必须在每个候选聚焦平面处执行重建,因此自动聚焦过程非常耗时,不适用于实时检测。因此传统自动聚焦方法在实际应用中受到很大限制。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的灵敏度差、精度低的缺陷而提供一种基于三分法和遗传算法的数字全息自动聚焦成像方法。
2、本发明的目的可以通过以下技术方案来实现:
3、一种基于三分法和遗传算法的数字全息自动聚焦成像方法,包括以下步骤:
4、s1:获取被测物体的待处理的离轴数字全息图和记录距离,对待处理的离轴数字全息图进行预处理得到复振幅分布;
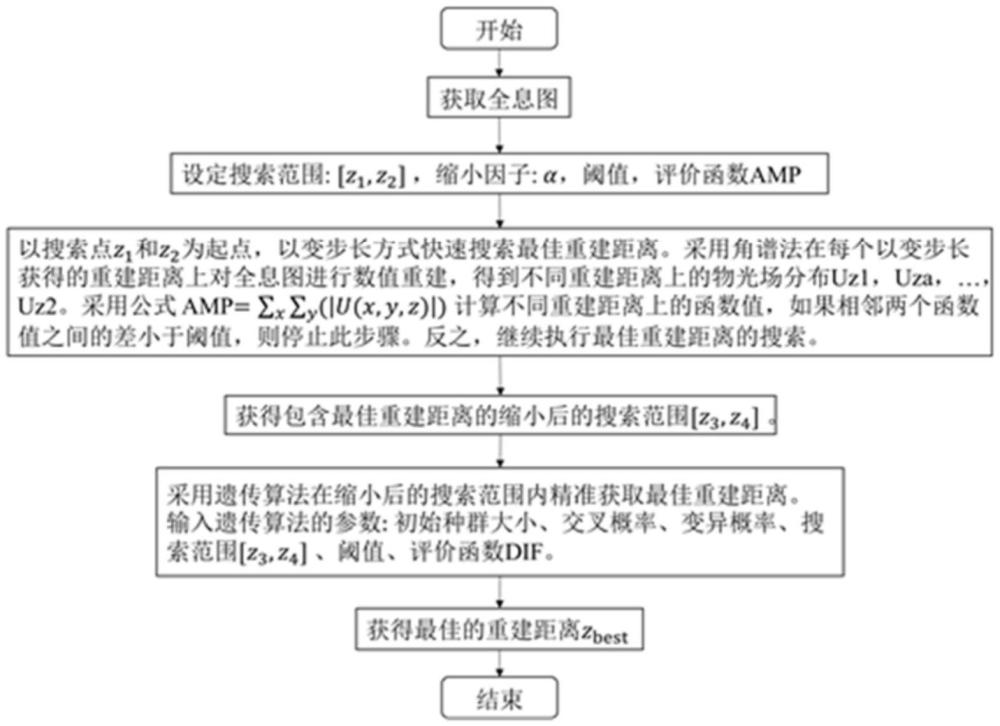
5、s2:设定搜索范围、第一聚焦评价函数、第一重建距离、第二重建距离和阈值,搜索范围的下限小于记录距离、上限大于记录距离;
6、s3:对复振幅分布,基于第一重建距离和第二重建距离,采用角谱法执行重建,并基于第一聚焦评价函数分别计算第一重建距离对应的函数值和第二重建距离的函数值;
7、s4:基于被测物体的类型、第一重建距离对应的函数值和第二重建距离对应的函数值,更新第一重建距离或第二重建距离,迭代缩小搜索范围直到达到阈值,输出包含聚焦平面位置的缩小后的搜索范围;
8、s5:通过遗传算法,根据被测物体的类型,计算并比较第二聚焦函数评价结果,获得最佳重建距离。
9、进一步地,第一聚焦评价函数的表达式为:
10、
11、m1=z1+(zk-z1)/α
12、m2=z1-(zk-z1)/α
13、式中,amp为第一聚焦评价函数,z1为搜索范围下限,zk为搜索范围上限,α为缩小因子,m1为第一重建距离,m2为第二重建距离,u(x,y;z)为复振幅分布。
14、进一步地,复振幅分布通过待处理的离轴数字全息图进行傅里叶变换、角谱传播和逆傅里叶变换处理获得。
15、进一步地,被测物体的类型包括振幅型物体和相位型物体。
16、进一步地,被测物体为振幅型物体时,步骤s4具体为:当第一重建距离对应的函数值大于第二重建距离对应的函数值时,保持第二重建距离不变,更新第一重建距离,并再次计算,直至搜索距离小于阈值;当第一重建距离对应的函数值小于第二重建距离对应的函数值时,保持第一重建距离不变,更新第二重建距离,并再次计算,直至搜索距离小于阈值。
17、进一步地,被测物体为振幅型物体时,步骤s5中,遗传算法选取函数值最小的个体的位置并将其作为最佳个体。
18、进一步地,被测物体为相位型物体时,步骤s4具体为:当第一重建距离对应的函数值大于第二重建距离对应的函数值时,保持第一重建距离不变,更新第二重建距离,并再次计算,直至搜索距离小于阈值;当第一重建距离对应的函数值小于第二重建距离对应的函数值时,保持第二重建距离不变,更新第一重建距离,并再次计算,直至搜索距离小于阈值。
19、进一步地,被测物体为相位型物体时,步骤s5中,遗传算法选取函数值最大的个体的位置并将其作为最佳个体。
20、进一步地,第二聚焦评价函数的计算表达式为:
21、
22、式中,dif为第二聚焦评价函数,u(x,y;z)为复振幅分布,u(x,y;z+δ)为下一相邻帧的复振幅分布。
23、进一步地,离轴数字全息图的成像光源为氦氖激光器。
24、与现有技术相比,本发明具有以下有益效果:
25、1)本发明将第一聚焦评价函数amp应用于三分法,快速缩小聚焦平面的搜索范围,应用第二聚焦评价函数dif提升遗传算法的极值点附近的灵敏度,避免遗传算法陷入局部最优解,提高计算精度。
26、2)本发明能够对如振幅型物体、相位型物体的不同类型的目标进行自动聚焦,具有广泛的适用性。
27、3)本发明无需在现有装置基础上安装额外硬件即可实现,易于使用。
技术特征:
1.一种基于三分法和遗传算法的数字全息自动聚焦成像方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于三分法和遗传算法的数字全息自动聚焦成像方法,其特征在于,所述第一聚焦评价函数的表达式为:
3.根据权利要求2所述的一种基于三分法和遗传算法的数字全息自动聚焦成像方法,其特征在于,所述复振幅分布通过待处理的离轴数字全息图进行傅里叶变换、角谱传播和逆傅里叶变换处理获得。
4.根据权利要求1所述的一种基于三分法和遗传算法的数字全息自动聚焦成像方法,其特征在于,所述被测物体的类型包括振幅型物体和相位型物体。
5.根据权利要求4所述的一种基于三分法和遗传算法的数字全息自动聚焦成像方法,其特征在于,所述被测物体为振幅型物体时,步骤s4具体为:当第一重建距离对应的函数值大于第二重建距离对应的函数值时,保持第二重建距离不变,更新第一重建距离,并再次计算,直至搜索距离小于阈值;当第一重建距离对应的函数值小于第二重建距离对应的函数值时,保持第一重建距离不变,更新第二重建距离,并再次计算,直至搜索距离小于阈值。
6.根据权利要求4所述的一种基于三分法和遗传算法的数字全息自动聚焦成像方法,其特征在于,所述被测物体为振幅型物体时,步骤s5中,遗传算法选取函数值最小的个体的位置并将其作为最佳个体。
7.根据权利要求4所述的一种基于三分法和遗传算法的数字全息自动聚焦成像方法,其特征在于,所述被测物体为相位型物体时,步骤s4具体为:当第一重建距离对应的函数值大于第二重建距离对应的函数值时,保持第一重建距离不变,更新第二重建距离,并再次计算,直至搜索距离小于阈值;当第一重建距离对应的函数值小于第二重建距离对应的函数值时,保持第二重建距离不变,更新第一重建距离,并再次计算,直至搜索距离小于阈值。
8.根据权利要求4所述的一种基于三分法和遗传算法的数字全息自动聚焦成像方法,其特征在于,所述被测物体为相位型物体时,步骤s5中,遗传算法选取函数值最大的个体的位置并将其作为最佳个体。
9.根据权利要求1所述的一种基于三分法和遗传算法的数字全息自动聚焦成像方法,其特征在于,所述第二聚焦评价函数的计算表达式为:
10.根据权利要求1所述的一种基于三分法和遗传算法的数字全息自动聚焦成像方法,其特征在于,所述离轴数字全息图的成像光源为氦氖激光器。
技术总结
本发明涉及一种基于三分法和遗传算法的数字全息自动聚焦成像方法,包括以下步骤:获取被测物体的待处理的离轴数字全息图和记录距离,预处理得到复振幅分布;设定搜索范围、第一聚焦评价函数、第一重建距离、第二重建距离和阈值;采用三分法和的第一聚焦评价函数AMP以非固定步长的形式迭代缩小聚焦平面的搜索范围,然后采用遗传算法和的第二聚焦评价函数DIF在缩小的搜索范围内精准定位聚焦平面。与现有技术相比,本发明具有灵敏度高、精度高、适用范围广等优点。
技术研发人员:周文静,关赢,崔泽
受保护的技术使用者:上海大学
技术研发日:
技术公布日:2024/10/28
- 还没有人留言评论。精彩留言会获得点赞!