收发模组耦合工装和耦合操作方法与流程
本申请涉及激光雷达,尤其是涉及一种收发模组耦合工装和耦合操作方法。
背景技术:
1、随着汽车智能辅助驾驶技术和自动驾驶技术发展,激光雷达具有测距远、角度分辨率优、抗干扰能力强等优势,成为高阶辅助驾驶/自动驾驶不可或缺的传感部件。
2、收发模组是激光雷达内部最为核心的部件,其中的发射模组发射出激光对前方物体进行扫描,同时接收模组接收反射回来的信号,形成点云图像。
3、收发模组由多个光学部件组成,光学部件的耦合对精度要求较高,需要对元器件进行有效固定,耦合过程中进行多维姿态调节,同时保证胶水固化后夹具释放时应力较小。
4、为此,亟需一种耦合工装来满足上述需求。
技术实现思路
1、本申请的目的在于提供一种收发模组耦合工装和耦合操作方法,可以实现发射反射镜和接收模块耦合过程中的多维姿态调节,进而实现发射反射镜和接收模块的精准耦合,同时点胶粘接好发射反射镜和接收模块之后释放松开的过程中应力小。
2、本申请的实施例可以这样实现:
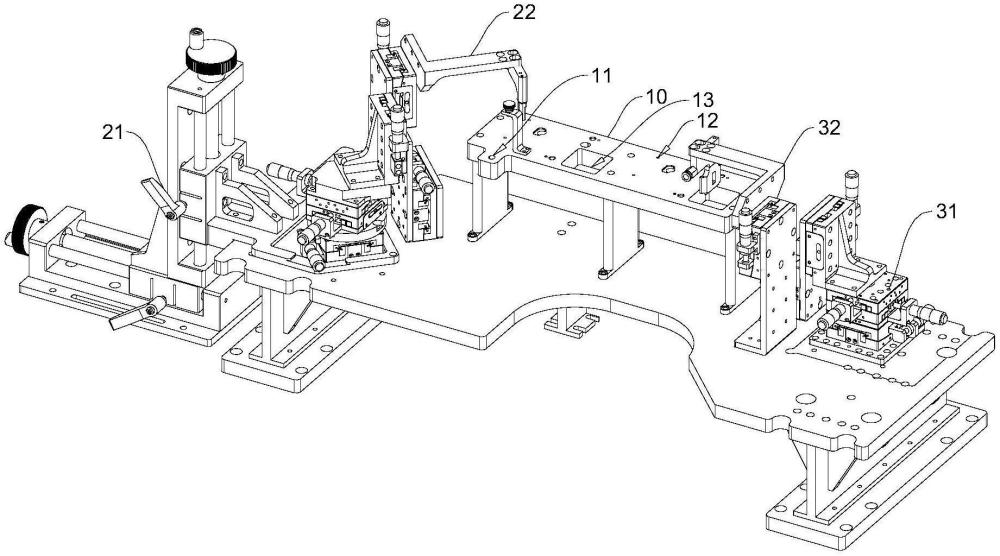
3、第一方面,本发明提供一种收发模组耦合工装,包括:
4、耦合平台,其上表面具有标定金样安装孔、收发模组安装孔和收发模组避让孔;
5、第一调节机构,包括第一位姿调节组件以及连接于所述第一位姿调节组件的第一真空抓取件,所述第一真空抓取件用于抓取发射反射镜,所述第一位姿调节组件用于带动所述第一真空抓取件进行x轴、y轴和z轴方向的平移以及绕x轴、y轴和z轴的转动;
6、第二调节机构,包括第二位姿调节组件以及连接于所述第二位姿调节组件的第二真空抓取件,所述第二真空抓取件用于抓取接收模块,所述第二位姿调节组件用于带动所述第二真空抓取件进行x轴、y轴和z轴方向的平移以及绕x轴、y轴和z轴的转动。
7、在可选的实施方式中,所述第一位姿调节组件包括粗位移组件以及连接于所述粗位移组件的精位姿调节组件,所述粗位移组件用于带动所述精位姿调节组件进行x轴和z轴方向的大行程位移,所述第一真空抓取件设置于所述精位姿调节组件,所述精位姿调节组件用于带动所述第一真空抓取件进行x轴、y轴和z轴方向的行程平移以及绕x轴、y轴和z轴的小角度转动。
8、在可选的实施方式中,所述粗位移组件包括燕尾槽x轴调节台以及连接于所述燕尾槽x轴调节台的燕尾槽z轴调节台,所述精位姿调节组件连接于所述燕尾槽z轴调节台。
9、在可选的实施方式中,所述精位姿调节组件包括依次连接的第一精密x轴偏摆调节台、第一精密y轴调节台、第一精密x轴调节台、第一精密z轴调节台、第一精密z轴旋转调节台和第一精密y轴俯仰调节台,所述第一真空抓取件连接于所述第一精密y轴俯仰调节台。
10、在可选的实施方式中,所述精密z轴调节台相对于所述精密x轴调节台呈绕z轴旋转45°摆放。
11、在可选的实施方式中,所述第一真空抓取件包括第一连接架和第一真空吸嘴,所述第一真空吸嘴通过所述第一连接架连接于所述第一位姿调节组件,所述第一真空吸嘴具有第一限位槽,所述第一限位槽的槽底具有第一条形吸附孔以及第一避让凹陷。
12、在可选的实施方式中,所述第二位姿调节组件包括依次连接的第二精密x轴偏摆调节台、第二精密x轴调节台、第二精密y轴调节台、第二精密z轴调节台、第二精密z轴旋转调节台和第二精密y轴俯仰调节台,所述第二真空抓取件连接于所述第二精密y轴俯仰调节台。
13、在可选的实施方式中,所述第二真空抓取件包括第二连接架和第二真空吸嘴,所述第二真空吸嘴通过所述第二连接架连接于所述第二位姿调节组件,所述第二真空吸嘴具有第二限位槽,所述第二限位槽的槽底具有第二条形吸附孔以及第二避让凹陷。
14、在可选的实施方式中,所述耦合平台的底部连接有多个支撑块。
15、在可选的实施方式中,所述收发模组耦合工装还包括支撑底架,所述支撑底架包括支撑底板以及连接在所述支撑底板下侧的多个底板支撑块,所述耦合平台和所述第二位姿调节组件均安装于所述支撑底板的上侧,所述第一位姿调节组件的底部与所述支撑底架并列布置。
16、在可选的实施方式中,所述耦合平台的上表面还有固定块安装孔,所述固定块安装孔用于安装固定块,所述固定块用于固定所述标定金样。
17、第二方面,本发明提供一种耦合操作方法,基于前述实施方式任一项所述的收发模组耦合工装实现,包括如下步骤:
18、s1,将标定金样安装到耦合平台;
19、s2,基于标定金样标定平行光管,标定完成后拆卸标定金样;
20、s3,将收发模组安装到耦合平台上,第一真空抓取件抓取发射反射镜,第二真空抓取件抓取接收模块,调节第一位姿调节组件以使发射反射镜移动至收发模组的第一初步耦合位置,调节第二位姿调节组件以使接收模块移动至收发模组的第二初步耦合位置;
21、s4,调节第一位姿调节组件使发射反射镜绕x轴、y轴转动,直至收发模组发出的光斑经发射反射镜反射后位于平行光管的相机视野中心;
22、s5,将光功率计移动到发射反射镜到平行光管的光路上,调节第一位姿调节组件使发射反射镜y轴平移,直至光功率计读取到的光斑功率参数达到最大值;
23、s6,通过位于收发模组上方的相机拍摄到的发射反射镜所在x轴位置调节第一位姿调节组件,以使发射反射镜x轴平移,直至发射反射镜移至第一预设x轴位置;
24、s7,基于千分尺调节第二位姿调节组件使接收模块绕x轴、y轴和z轴转动,以使接收模块相对于收发模组的接收镜头的光轴垂直;
25、s8,通过位于收发模组上方的相机拍摄到的接收模块所在x轴位置调节第二位姿调节组件,以使接收模块x轴平移,直至接收模块移至第二预设x轴位置。
26、与现有技术中相比,本申请实施例的有益效果包括,例如:
27、一方面通过耦合平台可以供标定金样和收发模组先后安装,以便于根据标定金样标定平行光管,从而后续方便通过标定后的平行光管以及外部的相机、光功率计等部件来调节第一位姿调节组件,从而改变被第一真空抓取件所抓取的发射反射镜的位置和角度姿态,实现发射反射镜耦合过程中的多维姿态调节,进而实现发射反射镜的精准耦合,另一方面基于外部的千分尺、相机等部件来调节第二位姿调节组件,从而改变被第二真空抓取件所抓取接收模块的位置和角度姿态,实现接收模块耦合过程中的多维姿态调节,进而实现接收模块的精准耦合,因此可以保证收发模组较高的耦合精度,同时通用性也较高。此外,通过真空吸附来分别抓取发射反射镜和接收模块,以在点胶粘接好发射反射镜和接收模块之后释放松开的过程中应力小。
技术特征:
1.一种收发模组(50)耦合工装,其特征在于,包括:
2.根据权利要求1所述的收发模组(50)耦合工装,其特征在于,所述第一位姿调节组件(21)包括粗位移组件以及连接于所述粗位移组件的精位姿调节组件,所述粗位移组件用于带动所述精位姿调节组件进行x轴和z轴方向的大行程位移,所述第一真空抓取件(22)设置于所述精位姿调节组件,所述精位姿调节组件用于带动所述第一真空抓取件(22)进行x轴、y轴和z轴方向的行程平移以及绕x轴、y轴和z轴的小角度转动。
3.根据权利要求2所述的收发模组(50)耦合工装,其特征在于,所述粗位移组件包括燕尾槽x轴调节台(210)以及连接于所述燕尾槽x轴调节台(210)的燕尾槽z轴调节台(211),所述精位姿调节组件连接于所述燕尾槽z轴调节台(211)。
4.根据权利要求2所述的收发模组(50)耦合工装,其特征在于,所述精位姿调节组件包括依次连接的第一精密x轴偏摆调节台(212)、第一精密y轴调节台(213)、第一精密x轴调节台(214)、第一精密z轴调节台(215)、第一精密z轴旋转调节台(216)和第一精密y轴俯仰调节台(217),所述第一真空抓取件(22)连接于所述第一精密y轴俯仰调节台(217)。
5.根据权利要求4所述的收发模组(50)耦合工装,其特征在于,所述精密z轴调节台相对于所述精密x轴调节台呈绕z轴旋转45°摆放。
6.根据权利要求1所述的收发模组(50)耦合工装,其特征在于,所述第一真空抓取件(22)包括第一连接架(220)和第一真空吸嘴(221),所述第一真空吸嘴(221)通过所述第一连接架(220)连接于所述第一位姿调节组件(21),所述第一真空吸嘴(221)具有第一限位槽(222),所述第一限位槽(222)的槽底具有第一条形吸附孔(223)以及第一避让凹陷(224)。
7.根据权利要求1所述的收发模组(50)耦合工装,其特征在于,所述第二位姿调节组件(31)包括依次连接的第二精密x轴偏摆调节台(310)、第二精密x轴调节台(311)、第二精密y轴调节台(312)、第二精密z轴调节台(313)、第二精密z轴旋转调节台(314)和第二精密y轴俯仰调节台(315),所述第二真空抓取件(32)连接于所述第二精密y轴俯仰调节台(315)。
8.根据权利要求1所述的收发模组(50)耦合工装,其特征在于,所述第二真空抓取件(32)包括第二连接架(320)和第二真空吸嘴(321),所述第二真空吸嘴(321)通过所述第二连接架(320)连接于所述第二位姿调节组件(31),所述第二真空吸嘴(321)具有第二限位槽(322),所述第二限位槽(322)的槽底具有第二条形吸附孔(323)以及第二避让凹陷(324)。
9.根据权利要求1所述的收发模组(50)耦合工装,其特征在于,所述耦合平台(10)的底部连接有多个支撑块(70)。
10.根据权利要求9所述的收发模组(50)耦合工装,其特征在于,所述收发模组(50)耦合工装还包括支撑底架(80),所述支撑底架(80)包括支撑底板(81)以及连接在所述支撑底板(81)下侧的多个底板支撑块(82),所述耦合平台(10)和所述第二位姿调节组件(31)均安装于所述支撑底板(81)的上侧,所述第一位姿调节组件(21)的底部与所述支撑底架(80)并列布置。
11.根据权利要求1所述的收发模组(50)耦合工装,其特征在于,所述耦合平台(10)的上表面还有固定块安装孔(14),所述固定块安装孔(14)用于安装固定块(60),所述固定块(60)用于固定所述标定金样(40)。
12.一种耦合操作方法,基于权利要求1-11任一项所述的收发模组(50)耦合工装实现,其特征在于,包括如下步骤:
技术总结
本申请公开一种收发模组耦合工装和耦合操作方法,一方面通过耦合平台可以供标定金样和收发模组先后安装,以便于根据标定金样标定平行光管,从而后续方便调节第一位姿调节组件,从而改变被第一真空抓取件所抓取的发射反射镜的位置和角度姿态,实现发射反射镜耦合过程中的多维姿态调节,进而实现发射反射镜的精准耦合,另一方面可以改变被第二真空抓取件所抓取接收模块的位置和角度姿态,实现接收模块耦合过程中的多维姿态调节,进而实现接收模块的精准耦合,因此可以保证收发模组较高的耦合精度,同时通用性也较高。此外,通过真空吸附来分别抓取发射反射镜和接收模块,以在点胶粘接好发射反射镜和接收模块之后释放松开的过程中应力小。
技术研发人员:尹涛,尹延博,李远,张莹
受保护的技术使用者:苏州北醒科技有限公司
技术研发日:
技术公布日:2024/11/14
- 还没有人留言评论。精彩留言会获得点赞!