空间遥感器反射镜准静定支撑结构的制作方法
本发明属于空间遥感器反射镜支撑领域,涉及空间遥感器反射镜准静定支撑结构。
背景技术:
1、反射式光学系统在空间遥感器中具有广泛的应用,其中反射镜的支撑对系统性能非常关键。反射镜的支撑需要保证反射镜的面型精度和位置精度,同时需要考虑承受发射阶段的力学环境,在轨的温度环境波动。基于静定约束理论的运动学支撑是一种理想的反射镜支撑结构形式。运动学支撑恰好约束反射镜的6个自由度,当环境温度发生变化时,反射镜发生微小的刚体运动而不是变形,因此可以保证反射镜的面形精度。但是理想的静定约束往往较难实现或者力学环境承受能力较差。
技术实现思路
1、本发明解决的技术问题是:克服现有技术的不足,提出空间遥感器反射镜准静定支撑结构,通过板弹簧组与关节轴承释放特定方向自由度约束实现了反射镜准静定支撑。
2、本发明解决技术的方案是:
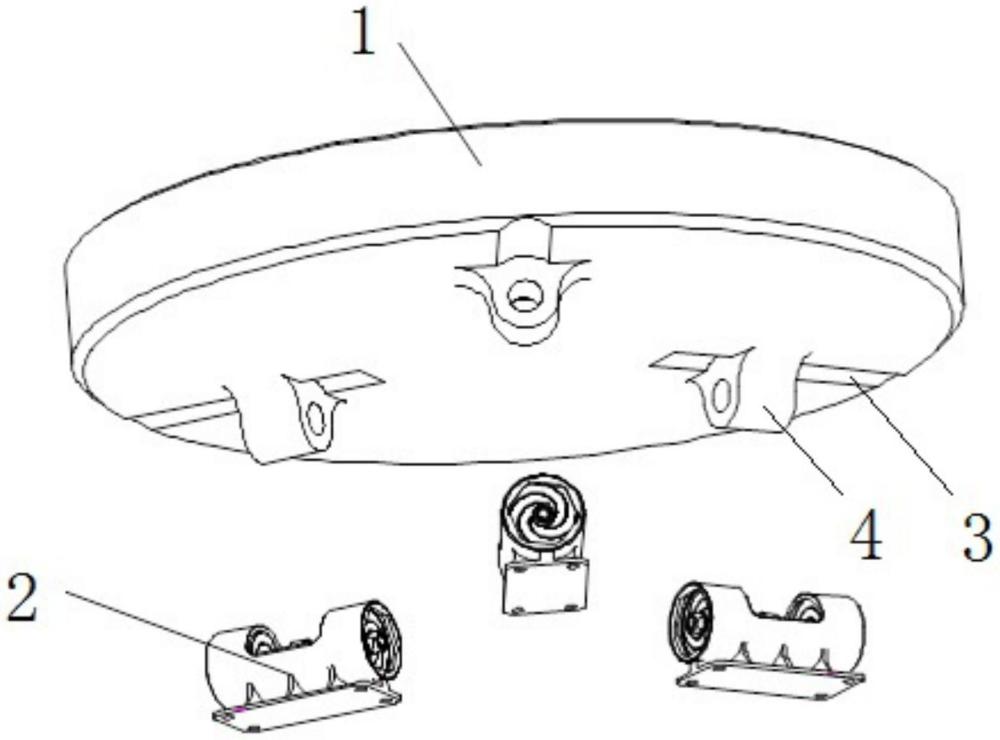
3、空间遥感器反射镜准静定支撑结构,包括反射镜和3个板弹簧阵列支撑组件;
4、其中,反射镜为水平放置的板状结构;3个板弹簧阵列支撑组件设置在反射镜的下表面,且3个板弹簧阵列支撑组件以反射镜的中心为中心,沿周向均匀分布。
5、在上述的空间遥感器反射镜准静定支撑结构,所述板弹簧阵列支撑组件为顶部设置有凹槽的筒状结构;板弹簧阵列支撑组件的轴线沿反射镜的径向设置;
6、或3个板弹簧阵列支撑组件的轴线与反射镜的径向垂直,3个板弹簧阵列支撑组件的轴线围成等边三角形。
7、在上述的空间遥感器反射镜准静定支撑结构,所述反射镜下表面在对应每个板弹簧阵列支撑组件的位置,沿对应板弹簧阵列支撑组件轴向设置有长槽;长槽的弧度与板弹簧阵列支撑组件筒状外壁弧度一致,实现板弹簧阵列支撑组件通过嵌入长槽中安装在反射镜下表面。
8、在上述的空间遥感器反射镜准静定支撑结构,所述反射镜在对应长槽中部设置有圆柱形凸起;板弹簧阵列支撑组件安装在长槽位置时,圆柱形凸起嵌入板弹簧阵列支撑组件顶部凹槽中。
9、在上述的空间遥感器反射镜准静定支撑结构,所述板弹簧阵列支撑组件沿轴向设置有通孔;圆柱形凸起设置有对应通孔;圆柱形凸起嵌入板弹簧阵列支撑组件顶部凹槽后,通孔同轴对接。
10、在上述的空间遥感器反射镜准静定支撑结构,所述板弹簧阵列支撑组件包括支撑座、支撑轴、关节轴承、内环锁定螺母、外环锁定螺母和2个板弹簧阵列;
11、其中,支撑座为水平放置的板状结构;支撑轴轴向水平设置在支撑座的上方;支撑轴的轴向两端分别套装1个板弹簧阵列;关节轴承套装在支撑轴的中部;内环锁定螺母套装在支撑轴两端的外壁,且内环锁定螺母的轴向与2个板弹簧阵列的轴端侧壁接触,实现对2个板弹簧阵列外侧内径的轴向限位;外环锁定螺母安装在2个板弹簧阵列两侧外壁处,且外环锁定螺母轴向与2个板弹簧阵列轴向外径端接触,实现对2个板弹簧阵列轴向外径端限位。
12、在上述的空间遥感器反射镜准静定支撑结构,所述支撑轴的轴向两端均为台阶结构;每端的台阶均实现对板弹簧阵列内侧壁的限位。
13、在上述的空间遥感器反射镜准静定支撑结构,所述板弹簧阵列支撑组件的运动过程为:
14、支撑轴带动2个板弹簧阵列的内径和内环锁定螺母沿轴向移动;外环锁定螺母固定在支撑座上不动,实现对2个板弹簧阵列外径的限位。
15、在上述的空间遥感器反射镜准静定支撑结构,所述板弹簧阵列包括n个板弹簧;n个板弹簧同轴堆叠;n为不小于4的正整数。
16、在上述的空间遥感器反射镜准静定支撑结构,所述板弹簧的侧壁上设置有不少于3个切槽;切槽的形状为阿基米德螺线;阿基米德螺线的极坐标方程为:
17、ρ=rmin+k·θ
18、式中,ρ为螺线在极坐标方程下的极径;
19、rmin为螺线起始点与极坐标中心的距离;
20、k为螺线之间的螺距;
21、θ为螺线在极坐标方程下的的极角。
22、本发明与现有技术相比的有益效果是:
23、(1)本发明的每个关节轴承约束3个平动自由度,3个关节轴承约束9个自由度,然后再通过板弹簧阵列近似释放3个自由度,从而实现6个自由的准静定约束;
24、(2)本发明通过板弹簧阵列的设计,实现当环境温度发生变化时,反射镜发生微小的刚体运动而不是变形,因此可以保证反射镜的面形精度;多片板弹簧叠加可进一步提高径向刚度和抗弯与抗扭刚度,同时保证板弹簧的轴向刚度较小,该情况可近似视为弹簧组件三个轴向的自由度被释放;
25、(3)本发明的板弹簧的侧壁上设置有不少于3个切槽,切槽的形状为阿基米德螺线,通过设计螺旋线的形状即可以改变板弹簧轴向刚度以及变形时的应力分布。
技术特征:
1.空间遥感器反射镜准静定支撑结构,其特征在于:包括反射镜(1)和3个板弹簧阵列支撑组件(2);
2.根据权利要求1所述的空间遥感器反射镜准静定支撑结构,其特征在于:所述板弹簧阵列支撑组件(2)为顶部设置有凹槽的筒状结构;板弹簧阵列支撑组件(2)的轴线沿反射镜(1)的径向设置;
3.根据权利要求2所述的空间遥感器反射镜准静定支撑结构,其特征在于:所述反射镜(1)下表面在对应每个板弹簧阵列支撑组件(2)的位置,沿对应板弹簧阵列支撑组件(2)轴向设置有长槽;长槽的弧度与板弹簧阵列支撑组件(2)筒状外壁弧度一致,实现板弹簧阵列支撑组件(2)通过嵌入长槽中安装在反射镜(1)下表面。
4.根据权利要求3所述的空间遥感器反射镜准静定支撑结构,其特征在于:所述反射镜(1)在对应长槽中部设置有圆柱形凸起;板弹簧阵列支撑组件(2)安装在长槽位置时,圆柱形凸起嵌入板弹簧阵列支撑组件(2)顶部凹槽中。
5.根据权利要求4所述的空间遥感器反射镜准静定支撑结构,其特征在于:所述板弹簧阵列支撑组件(2)沿轴向设置有通孔;圆柱形凸起设置有对应通孔;圆柱形凸起嵌入板弹簧阵列支撑组件(2)顶部凹槽后,通孔同轴对接。
6.根据权利要求4所述的空间遥感器反射镜准静定支撑结构,其特征在于:所述板弹簧阵列支撑组件(2)包括支撑座(21)、支撑轴(22)、关节轴承(23)、内环锁定螺母(24)、外环锁定螺母(25)和2个板弹簧阵列(26);
7.根据权利要求6所述的空间遥感器反射镜准静定支撑结构,其特征在于:所述支撑轴(22)的轴向两端均为台阶结构;每端的台阶均实现对板弹簧阵列(26)内侧壁的限位。
8.根据权利要求6所述的空间遥感器反射镜准静定支撑结构,其特征在于:所述板弹簧阵列支撑组件(2)的运动过程为:
9.根据权利要求6所述的空间遥感器反射镜准静定支撑结构,其特征在于:所述板弹簧阵列(26)包括n个板弹簧;n个板弹簧同轴堆叠;n为不小于4的正整数。
10.根据权利要求9所述的空间遥感器反射镜准静定支撑结构,其特征在于:所述板弹簧的侧壁上设置有不少于3个切槽;切槽的形状为阿基米德螺线;阿基米德螺线的极坐标方程为:
技术总结
本发明涉及空间遥感器反射镜准静定支撑结构,属于空间遥感器反射镜支撑领域;包括反射镜和3个板弹簧阵列支撑组件;其中,反射镜为水平放置的板状结构;3个板弹簧阵列支撑组件设置在反射镜的下表面,且3个板弹簧阵列支撑组件以反射镜的中心为中心,沿周向均匀分布;板弹簧阵列支撑组件为顶部设置有凹槽的筒状结构;板弹簧阵列支撑组件的轴线沿反射镜的径向设置;或3个板弹簧阵列支撑组件的轴线与反射镜的径向垂直,3个板弹簧阵列支撑组件的轴线围成等边三角形;本发明通过板弹簧组与关节轴承释放特定方向自由度约束实现了反射镜准静定支撑。
技术研发人员:安书兵,郭丁,温中凯,刘慧,傅祥博,白绍竣,祁晶晶,成明辉,杨帆,陈敏
受保护的技术使用者:中国空间技术研究院
技术研发日:
技术公布日:2024/12/30
- 还没有人留言评论。精彩留言会获得点赞!