一种适用直升机载光电吊舱的长焦距稳定跟踪系统的制作方法
本技术属于定位跟踪系统,尤其涉及一种适用直升机载光电吊舱的长焦距稳定跟踪系统。
背景技术:
1、机载光电吊舱是空中搜索发现返回式航天器的关键设备,主要承担飞船返回舱乘伞下降阶段目标搜索、实况景象拍摄和着陆坐标测量任务。吊舱可见光最大焦距达到900mm,红外最大焦距达到720mm,在飞行震动环境下采用传统方法长焦距光学系统难以稳定跟踪目标,无法满足空中搜索发现返回式航天器的工程实际需要。
技术实现思路
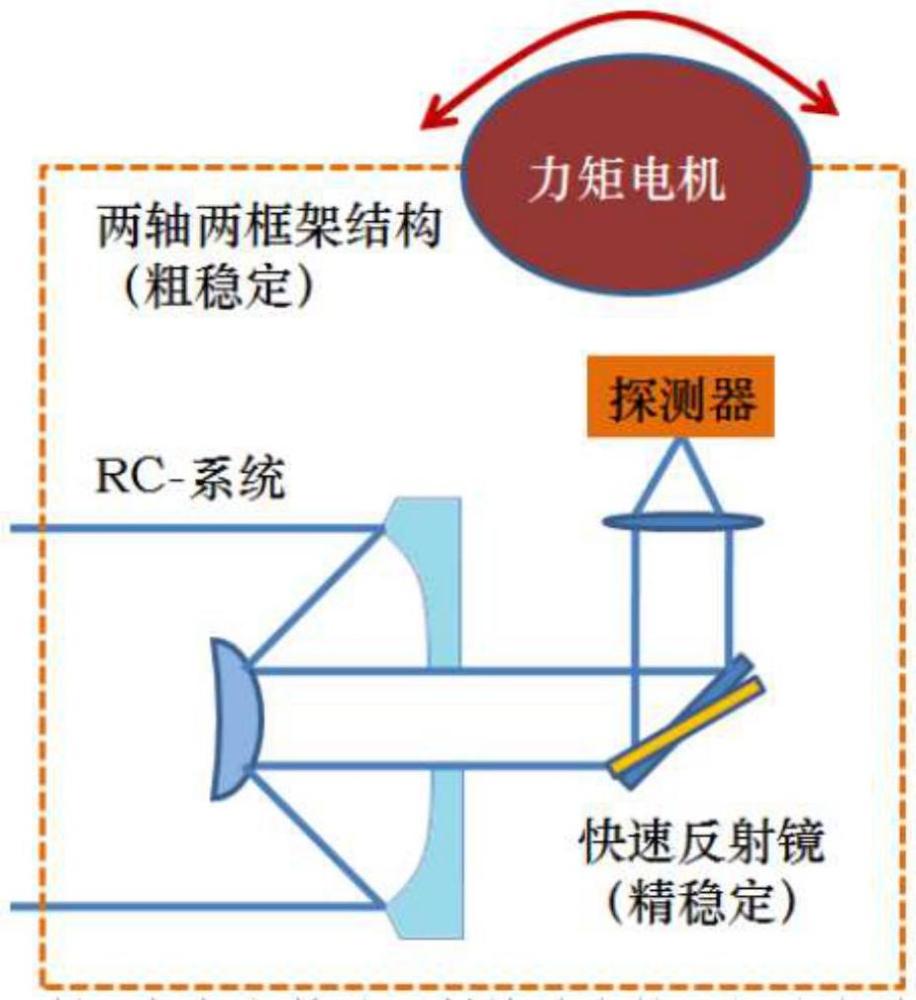
1、本实用新型的目的在于提供一种适用直升机载光电吊舱的长焦距稳定跟踪系统。应用两轴两框架、快速反射镜结构、多轴被动隔振系统的主被动复合稳定策略,解决飞行震动环境下的长焦距稳定跟踪难题。
2、本实用新型提供一种适用直升机载光电吊舱的长焦距稳定跟踪系统。所述长焦距稳定跟踪系统被配置在直升机载光电吊舱上,所述光电吊舱挂载在所述直升机的机头下方,所述长焦距稳定跟踪系统包括多轴被动隔振系统和成像系统;其中:
3、所述光电吊舱采用所述多轴被动隔振系统,其上环面与所述直升机刚性连接,其下支座与光电载荷刚性连接;所述多轴被动隔振系统的构型体积包络为:外径等于450mm、内径为360mm、高度为80mm的环形截面柱体;
4、所述成像系统位于所述多轴被动隔振系统内,包括探测器、快速反射镜组件、rc系统;所述快速反射镜组件包括音圈电机驱动器、平面反射镜、基座、柔性机构、高精度位移传感器。
5、其中,在转塔偏心布局不变的情况下,增加所述多轴被动隔振系统的三向等刚度能力,减小自由度振动耦合引起的视轴误差。
6、其中,所述多轴被动隔振系统的线振动共振频率为5hz~9hz,角振动共振频率为5hz~7.5hz。
7、其中,所述快速反射镜组件在两轴转动运动上输出角位移,运动分辨率为1μrad,双向重复定位精度为2μrad,线性度为0.1%,绝对精度为5μrad,两轴分别具有±1°的机械旋转角度,闭环控制带宽为300hz,具有毫秒级的响应时间。
8、综上,本实用新型实现了直升机载光电吊舱长焦距稳定跟踪,解决了长焦距与抗飞行环境震动的矛盾,同时利用两轴两框架+快速反射镜结构满足直升机挂载要求,为航天搜救分队提供了高性能稳定跟踪的直升机载光电吊舱,可精准捕获返回式航天器空中位置,大大提高了空中搜索能力,可广泛应用于航天搜救、民用搜救等领域。
技术特征:
1.一种适用直升机载光电吊舱的长焦距稳定跟踪系统,其特征在于,所述长焦距稳定跟踪系统被配置在直升机载光电吊舱上,所述光电吊舱挂载在所述直升机的机头下方,所述长焦距稳定跟踪系统包括多轴被动隔振系统和成像系统;其中:
2.根据权利要求1所述的一种适用直升机载光电吊舱的长焦距稳定跟踪系统,其特征在于,所述多轴被动隔振系统的线振动共振频率为5hz~9hz,角振动共振频率为5hz~7.5hz。
3.根据权利要求2所述的一种适用直升机载光电吊舱的长焦距稳定跟踪系统,其特征在于,所述快速反射镜组件在两轴转动运动上输出角位移,运动分辨率为1μrad,双向重复定位精度为2μrad,线性度为0.1%,绝对精度为5μrad,两轴分别具有±1°的机械旋转角度,闭环控制带宽为300hz,具有毫秒级的响应时间。
技术总结
本技术提供一种适用直升机载光电吊舱的长焦距稳定跟踪系统,属于定位跟踪系统技术领域。所述长焦距稳定跟踪系统被配置在直升机载光电吊舱上,所述光电吊舱挂载在所述直升机的机头下方,所述长焦距稳定跟踪系统包括多轴被动隔振系统和成像系统;其中:所述光电吊舱采用所述多轴被动隔振系统,其上环面与所述直升机刚性连接,其下支座与光电载荷刚性连接;所述多轴被动隔振系统的构型体积包络为:外径等于450mm、内径为360mm、高度为80mm的环形截面柱体。本技术将两轴两框架、快速反射镜结构、多轴被动隔振系统相结合,形成主被动复合稳定策略,实现光电吊舱在直升机震动环境下的长焦距稳定跟踪目标。
技术研发人员:郑永煌,卞韩城,于镓源,陈建军,吴建霖,高雅,朱明明,崔振,王正军,张丹,王欣欣
受保护的技术使用者:中国人民解放军63620部队
技术研发日:20240118
技术公布日:2024/9/19
- 还没有人留言评论。精彩留言会获得点赞!