全电动注塑机自适应降噪系统的制作方法
本发明涉及全电动注塑机领域,更具体地,涉及一种全电动注塑机自适应降噪系统。
背景技术:
1、全电动注塑机是一种全部动力都由电力供给的加工注塑机。可以将热塑性塑料注射成型并加工成各种模具。是化工材料合成加工过程中常用的一种机器。其中,注射系统是全电动注塑机最主要的组成部分之一,一般有柱塞式、螺杆式、螺杆预塑柱塞注射式三种主要形式,应用最广泛的是螺杆式,其作用是,在全电动注塑机的一个循环中,能在规定的时间内将一定数量的塑料加热塑化后,在一定的压力和速度下,通过螺杆将熔融塑料注入模具型腔中,注射结束后,对注射到模腔中的熔料保持定型。
2、全电动注塑机产生不正常的噪声可能是油箱内的油量不足。全电动注塑机的油箱内是液压油,在液压油不足时,液压泵吸入空气或滤油器污染阻塞造成液压泵缺油,导致油液中的气泡排出撞击叶片产生噪声。此时全电动注塑机处于产生噪声的高危场景,需要执行降噪处理,然而,即使即时如此,如果周围不存在人体对象时,一直处于高精度的降噪处理,会浪费大量的降噪设备的功耗和电力。
3、因此,需要基于全电动注塑机是否处于噪声发生的高危环境以及全电动注塑机周围是否存在较近的人体目标提供丰富、多层次的自适应降噪处理机制,显然,现有技术中缺乏这样的自适应降噪处理机制,也缺乏执行自适应降噪处理机制的软硬件设施。
4、在其他技术领域公开了一些关于自适应降噪的技术方案,例如申请公布号为cn115165081a的发明提供了一种矿山机械振动信号采集及工况识别的系统和方法,系统包括:用于采集各种矿山机械振动信号数据的振动加速度传感器;用于将振动加速度传感器采集的振动信号通过信号连接线上传至控制器的动态信号采集卡;用于根据不同矿山机械设备对采集到的振动信号进行自适应降噪处理,完成振动信号采集工作的控制器;用于针对所采集的振动信号完成频谱分析,自适应识别不同振动信号下的矿山机械设备运行工况,完成对系统采集的振动信号的工况识别工作的上位机。该发明技术方案产生的技术效果主要是提高对各种矿山机械设备的振动信号检测和工况识别的准确性。以及申请公布号为cn114386460a的发明提供了一种基于自适应降噪卷积神经网络的故障诊断方法,方法包括以下步骤:检测机械设备振动信号,组成一维的振动数据集,对振动数据集做灰度图化处理,获得灰度图数据库;将灰度图数据库输入自适应降噪卷积神经网络进行训练,训练得到其自适应降噪神经网络模型;利用训练好的自适应降噪神经网络模型进行故障诊断。该发明技术方案利用其含有自适应滤波器使得卷积神经网络能自适应高噪声下的故障诊断,具有抗噪能力强和准确性高的优点。
5、由于技术领域的不同,上述技术方案显然不能应用到全电动注塑机的降噪处理中。
技术实现思路
1、为了解决现有技术中的技术问题,本发明提供了一种全电动注塑机自适应降噪系统,能够分别采用高精度的检测机制检测全电动注塑机是否处于噪声发生的高危环境以及全电动注塑机周围是否存在较近的人体目标,并基于上述两种检测结果的组合,提供丰富、多层次的自适应降噪处理机制,尤为关键的是,提供了执行自适应降噪处理机制的软硬件设施,从而实现降噪资源节省以及降噪处理效果的动态均衡。
2、根据本发明的一方面,提供了一种全电动注塑机自适应降噪系统,所述系统包括:
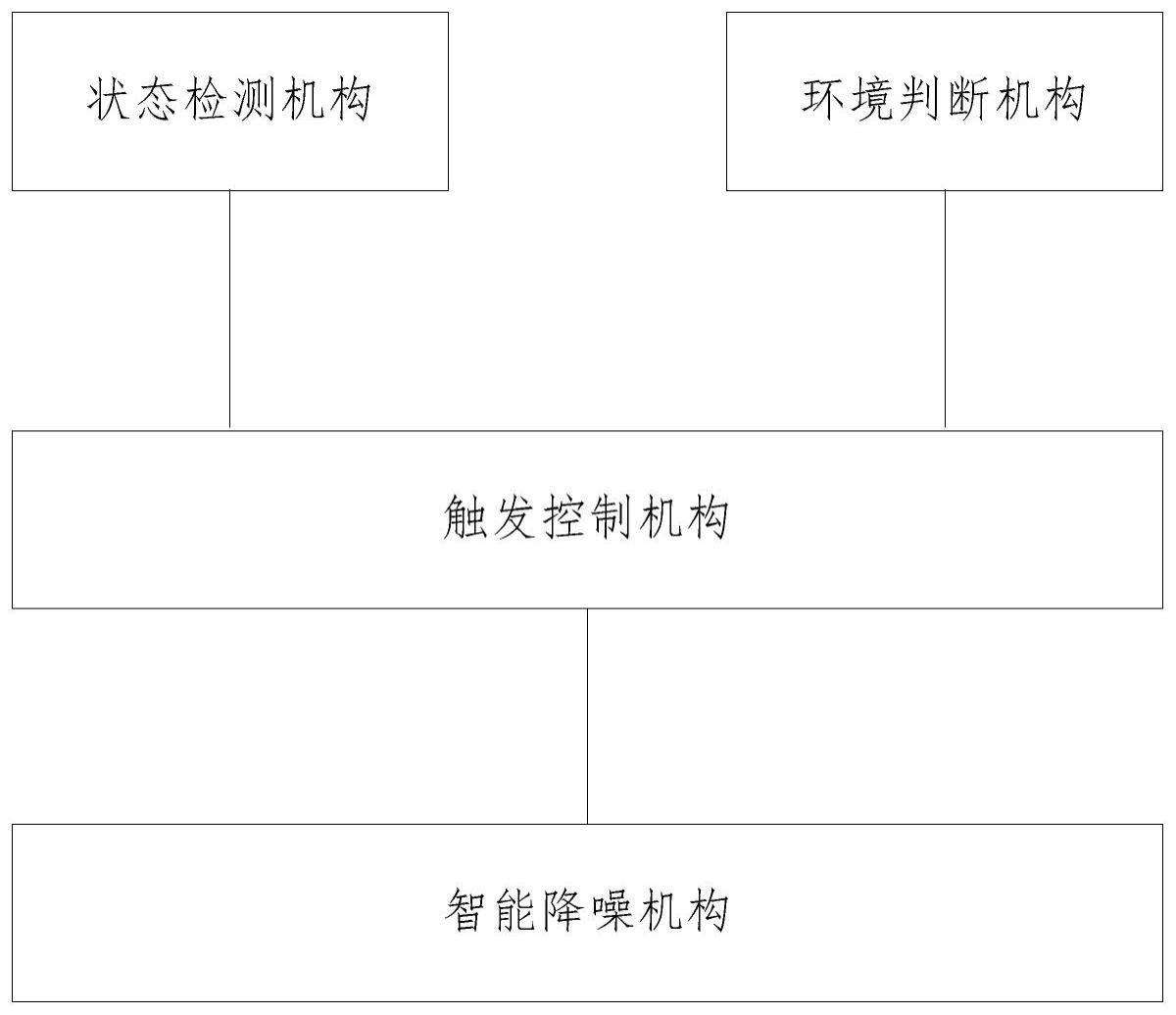
3、状态检测机构,包括微型摄像单元、辅助照明单元、内容分析单元和状态解析单元,所述微型摄像单元设置在全电动注塑机的油箱顶部封盖的中央位置,用于朝向油箱内部执行摄像操作以获得实时采集帧,所述内容分析单元与所述微型摄像单元连接,用于检测所述实时采集帧中的各个油体像素点和各个非油体像素点,并获得所述各个油体像素点分别在所述实时采集帧的中的各个成像景深值,所述状态解析单元与所述内容分析单元连接,用于在所述实时采集帧的中的各个成像景深值的代表景深值深于或者等于设定景深阈值时,发出噪声高危信号;
4、环境判断机构,用于在判断全电动注塑机周围环境的捕获画面中面积最大的人体目标占据捕获画面的像素点数量大于等于设定数量阈值时,发出人体靠近信号,否则,发出人体远离信号;
5、触发控制机构,分别与状态检测机构、环境判断机构以及智能降噪机构连接,用于在接收到噪声高危信号且接收到人体远离信号,启动智能降噪机构的单重反相降噪处理,还用于在接收到噪声高危信号且接收到人体靠近信号,启动智能降噪机构的多重反相降噪处理;
6、智能降噪机构,采用反相等幅模式执行对全电动注塑机发生噪声的现场降噪处理,所述智能降噪机构具有单重反相降噪处理和多重反相降噪处理两种处理设置,在多重反相降噪处理中,采用时间上连续的多次反相降噪处理,后一次的反相降噪处理基于前一次反相降噪处理后现场噪声的测量结果以继续执行反相等幅模式的降噪处理;
7、其中,在接收到噪声高危信号且接收到人体靠近信号,启动智能降噪机构的多重反相降噪处理包括:全电动注塑机周围环境的捕获画面中面积最大的人体目标占据捕获画面的像素点数量越多,多重反相降噪处理中执行的重数越多。
8、本发明的全电动注塑机自适应降噪系统设计智能、运行稳定。由于能够采用自适应降噪处理机制的软硬件设施,基于全电动注塑机是否处于噪声发生的高危环境以及周围是否存在较近的人体目标两种检测结果的组合,提供丰富、多层次的自适应降噪处理机制。
技术特征:
1.一种全电动注塑机自适应降噪系统,其特征在于,所述系统包括:
2.如权利要求1所述的全电动注塑机自适应降噪系统,其特征在于:
3.如权利要求2所述的全电动注塑机自适应降噪系统,其特征在于,所述系统进一步包括:
4.如权利要求2所述的全电动注塑机自适应降噪系统,其特征在于,所述系统进一步包括:
5.如权利要求2-4任一所述的全电动注塑机自适应降噪系统,其特征在于:
6.如权利要求2-4任一所述的全电动注塑机自适应降噪系统,其特征在于:
7.如权利要求2-4任一所述的全电动注塑机自适应降噪系统,其特征在于:
8.如权利要求7所述的全电动注塑机自适应降噪系统,其特征在于:
9.如权利要求8所述的全电动注塑机自适应降噪系统,其特征在于:
10.如权利要求2-4任一所述的全电动注塑机自适应降噪系统,其特征在于:
技术总结
本发明涉及一种全电动注塑机自适应降噪系统。所述系统包括:触发控制机构,用于在接收到噪声高危信号以及人体远离信号,启动智能降噪机构的单重反相降噪处理,在接收到噪声高危信号以及人体靠近信号,启动智能降噪机构的多重反相降噪处理;智能降噪机构,采用反相等幅模式执行对全电动注塑机现场的降噪处理,在其多重反相降噪处理中,采用时间上连续的多次反相降噪处理,后一次的反相降噪处理基于前一次反相降噪处理后现场噪声的测量结果。通过本系统,能够采用自适应降噪处理机制的软硬件设施,基于全电动注塑机是否处于噪声发生的高危环境以及周围是否存在较近的人体目标两种检测结果的组合,提供丰富、多层次的自适应降噪处理机制。
技术研发人员:徐丰,汪军建
受保护的技术使用者:宁波力松注塑科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!