一种机器人焊接用熔池监控支架
1.本发明涉及机器人焊接领域,具体涉及一种机器人焊接用熔池监控支架。
背景技术:
2.在机器人焊接领域中,常常需要研究焊接过程中熔池的形貌来分析焊接质量,进而更好地指导控制参数的选取。而获取熔池需要用电弧监控相机对熔池区域进行实时拍摄跟踪,寻找到最接近实际测量值的熔池图像,对于后续的参数特征提取发挥着积极的意义。设计一种机器人焊接用熔池监控支架,实现从不同方向对熔池进行监控。
技术实现要素:
3.为了解决焊接熔池实时拍摄跟踪问题,提供了一种能从焊枪的正前方和左侧面,右侧面固定拍摄,还可实现旋转拍摄的熔池监控支架。
4.本发明解决其技术问题所采用的技术方案是:一种机器人焊接用熔池监控支架,包括导轨装置,调节机构,传动机构和滑动装置。所述的导轨装置包括导轨及导轨安装板,所述导轨是由包括两个半圆弧形导轨和两个直线导轨拼接组成,导轨与导轨安装板通过过孔铆接;所述滑动装置包括相机安装板,滑块,滑块钉,所述滑块与滑块钉连接成一体,滑块钉与链条间通过插接方式连接,所述导轨与滑块嵌合在一起,相机安装板在滑块正上方通过螺钉连接成一体,滑块可在导轨上自由移动;所述的伸缩机构中的伸缩杆下端与固定夹板连接成一体,固定夹板两端有螺纹孔与导轨安装板通过螺纹连接,其上端与焊枪安装板连接,且其中间开设通孔使焊枪通过;所述传动装置包括张紧轮,链轮,链条,所述导轨槽中放置链条且导轨四个角上分别安装链轮,链条与链轮连接成一体,电机输出轴驱动链轮进而带动链条运动,导轨上放置一个张紧轮,用于调节链条的松紧。
5.本发明所用的电机安装在链轮下方,四个链轮安装在导轨的四个对角上,张紧轮位于其中两个链轮中间,所述电机输出轴与链轮连接,电机轴转动的同时带动链轮运动,扣接在链轮上的链条随链轮传动。张紧轮中间孔穿过固定柱且通过平键连接方式实现固定,其外圈与链条相连并随链条一起转动,内圈固定,当链条太松时可以通过调节张紧轮拧紧链条,防止链条掉落。
6.作为优选的方案,所述的伸缩机构上端固定连接焊枪安装板,安装板设有带螺纹的长孔,可实现对焊枪的微调,通过螺钉固定焊枪。
7.作为优选的方案,所述的安装板表面涂附耐高温耐弧光的涂料防护层。
8.作为优选的方案,所述的相机安装板上有凹陷的相机安装槽。
9.作为优选的方案,所述的伸缩杆为中空并且长度可调节。
10.作为优选的方案,所述的链条为单排链。
11.进一步地,所述的安装板为中空结构。
12.进一步地,所述的链轮下方连接电机,电机由直流电源驱动。
13.进一步地,所述的相机镜头始终低于焊枪最低点,并保持与熔池位置平行。
14.本发明的有益效果是:一种机器人焊接用熔池监控支架,采用链条传动方式实现对熔池的全方位拍摄,也可以通过移动滑块在固定位置拍摄熔池,如位于焊枪的正前方,左面和右面,易于操作,装配方便。轨道安装板支撑起轨道和传动机构,通过调节机构与机器人连接,轨道随机器人一起运动,拍摄出熔池的动态焊接过程。
附图说明
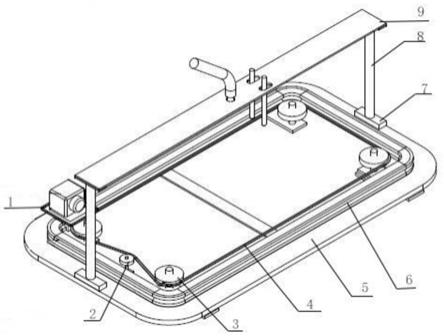
15.图1是本发明所述的一种机器人焊接用熔池监控支架总装配图;
16.图2是本发明所述的一种机器人焊接用熔池监控支架滑动装置装配图;
17.图3是本发明所述的一种机器人焊接用熔池监控支架滑动装置结构图;
18.图4是本发明所述的一种机器人焊接用熔池监控支架俯视图;
19.图5是本发明所述的一种机器人焊接用熔池监控支架俯视图中a-a剖面图;
20.图6是本发明所述的一种机器人焊接用熔池监控支架传动机构结构图;
21.附图中标记分述如下:1、滑动装置,2、张紧轮,3、链轮,4、链条,5、导轨安装板,6、导轨,7、固定夹板,8、伸缩杆,9、焊枪安装板,10、相机安装板,11、滑块,12、滑块钉,13、安装板,14、电机,15、微调长孔,16、紧定螺钉。
具体实施方式
22.现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明发明的基本结构,因此其仅显示与本发明有关的构成。
23.如图1所示的一种机器人焊接用熔池监控支架,包括滑动装置1,由张紧轮2,链轮3,链条4组成的传动机构,由导轨安装板5和导轨6组成的导轨装置,由固定夹板7,伸缩杆8和焊枪安装板9组成的调节机构。所述调节机构中的伸缩杆8下端与固定夹板7焊接成一体并且与横向导轨通过螺钉连接,伸缩杆 8上端与焊枪安装板9通过螺栓方式连接,所述伸缩杆上有若干固定孔且中空,带有伸缩按钮的活动杆伸到拉杆中调整相机支架的高低,所述焊枪安装板中间开有过孔使得焊枪通过,通过中间的长孔固定焊枪;所述导轨6中间有若干通孔,导轨安装板5上的螺钉穿过这些通孔,用螺母拧紧,使得导轨及其安装板固定为一体,横向导轨两端有两个未穿透的螺纹孔,固定夹板7底部的螺钉与螺纹孔配合连接,所述导轨安装板比导轨宽。
24.如图2、3所示的一种机器人焊接用熔池监控支架,所述滑动装置1包括相机安装板10,滑块11,滑块钉12,所述滑块钉为圆柱形,插入至链条空隙处,实现了滑动装置与传动机构的连接;所述滑块11上方固定设置有相机安装板10,两者焊接成一体,所述相机安装板为正方形,所述安装板内部设置有向内凹陷的相机卡槽,用于固定相机,当相机需要固定在焊枪的左面,右面或正前面拍摄时,滑块可在导轨上移动到固定位置,即可拍摄,操作简单方便,所述相机始终低于焊枪最低点,保证镜头能对准熔池处。
25.图4、5所示的一种机器人焊接用熔池监控支架,所述焊枪安装板9中部开设有带螺纹的微调长孔15,用于调节焊枪的偏角,以找到最好的拍摄角度,所述紧定螺钉16可穿过该通孔来固定焊枪。
26.图6所示的一种机器人焊接用熔池监控支架,本发明设有一个张紧轮和四个链轮且均有安装板13与之连接配合安装,所述传动机构中的张紧轮2安装于导轨中部,导轨6的
四个角设有链轮,将链条4连接成一圈,所述张紧轮的外圈与链条连接随链条转动,内圈固定,所述电机14安装在链轮下面,通过螺钉固定在轨道上,电机输出轴连接链轮,电机使用直流供电,电机通电时,其输出轴运动,带动链轮旋转,所述链条由单排链组成,采用链条传动方式运动,所述链条平放在导轨槽内,其侧面与滑块钉插接,上方与链轮齿合。
27.本发明所述的一种机器人焊接用熔池监控支架,导轨6为环形导轨,滑动装置1位于导轨6上方并与链条4连接,通过电机14的驱动作用,可以实现相机围绕熔池旋转拍摄,对于采集复杂焊接过程熔池动态图像提供了新思路,此外,在没有电机驱动作用下,可以手动移动滑块,带动相机在不同的角度下拍摄熔池,获得多种多样的熔池形态,有利于提高研究的质量和实验数据的准确性。
28.以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
技术特征:
1.一种机器人焊接用熔池监控支架,包括由导轨安装板(5)和导轨(6)组成的导轨装置,由伸缩杆(8)和焊枪安装板(9)组成的调节机构,由相机安装板(10),滑块(11),滑块钉(12)组成的滑动装置(1),由张紧轮(2),链轮(3),链条(4)组成的传动机构,其特征在于:所述伸缩杆(8)下端与固定夹板(7)连成一体,固定夹板两端有螺纹孔与导轨安装板(5)通过螺纹连接,其上端与所述焊枪安装板(9)连接,且其中间开设通孔使焊枪通过,所述导轨(6)由两个半圆弧形和两个直线轨道拼接而成,导轨槽中放置链条(4),所述链轮(3)分别安装在导轨的四个角,链条(4)中的小孔卡接在链轮上,电机(14)输出轴驱动链轮(3)进而带动链条运动,实现了滑动装置(1)在导轨上旋转,导轨(6)上放置一个张紧轮(2),用于调节链条的松紧,所述滑动装置(1)中滑块(11)的一端与所述滑块钉(12)接合成一体,相机安装板(10)与滑块(11)固定成一体,滑块可在导轨上自由移动。2.根据权利要求1所述的一种机器人焊接用熔池监控支架,其特征在于:所述导轨(6)置于轨道安装板(5)上,两者通过过孔铆接,滑块(11)卡接在导轨内,其上方放置相机安装板(10)并用螺钉连接。3.根据权利要求1所述的一种机器人焊接用熔池监控支架,其特征在于:所述焊枪安装板(9)中间开设带有螺纹的长孔(15),实现对焊枪位置进行微调,用紧定螺钉(16)固定焊枪,此结构可以改善拍摄熔池的质量。4.根据权利要求1所述的一种机器人焊接用熔池监控支架,其特征在于:张紧轮(2)中间孔穿过导轨(6)上的固定柱,通过平键固定,其外圈与链条(4)相连并随之一起转动,内圈固定。5.根据权利要求1所述的一种机器人焊接用熔池监控支架,其特征在于:所述张紧轮(2),链轮(3)都固设有安装板(13),安装板表面涂附耐高温耐弧光的涂料防护层。6.根据权利要求1所述的一种机器人焊接用熔池监控支架,其特征在于:所述相机安装板(10)上有凹陷的相机安装槽,相机镜头始终低于焊枪最低点,并保持与熔池位置平行。
技术总结
本发明涉及机器人焊接领域,具体涉及一种机器人焊接用熔池监控支架,可实现对熔池监控相机的拍摄角度进行调整及旋转拍摄,本发明采用链条传动方式实现对熔池的全方位拍摄,也可以通过移动滑块在固定位置拍摄熔池,如位于焊枪的正前方,左面和右面,易于操作,装配方便。轨道安装板支撑起轨道和传动机构,通过调节机构与机器人连接,轨道随机器人一起运动,拍摄出熔池的动态焊接过程。出熔池的动态焊接过程。出熔池的动态焊接过程。
技术研发人员:姚屏 徐梓惠 唐贺清
受保护的技术使用者:广东技术师范大学
技术研发日:2020.09.03
技术公布日:2022/3/3
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1