一种管型结构件自动定位焊接机器人的制作方法
1.本实用新型涉及母线槽加工的技术领域,尤其涉及一种管型结构件自动定位焊接机器人。
背景技术:
2.母线槽由于输送电能力强,发热少,特别是大功率送电的情况下工作平稳,是目前高层楼宇、大型建筑以及工厂进行送电的不二选择。目前母线槽的壳体大多采用多块管型结构件进行拼接,由于管型结构件的剪切工艺不可能达到准直状态,在对接处设置有基准对接线,所以两段分管材的对接处就不是严格意义上的直线,因此对接处会偏离基准对接线,通常需要在对接处采用焊接的方式进行焊接。
3.目前对接处的焊接是采用人工焊接的方式,利用固定装置将待焊接的两段分管材进行固定,形成对接处,工人需要在焊接过程中,以基准对接线为运动中心,不断调节夹具在垂直于基准对接线延伸方向上的运动,以使夹具夹持的焊枪的焊丝熔池落在对接处,实现两段分管材的焊接。而种方法精度较差,自动化程度低,浪费人力,且定位不牢固,导致产品误差大。
4.鉴于上述问题,本设计人基于从事此类产品工程应用多年丰富的实务经验及专业知识,并配合学理的运用,积极加以研究创新,以期设计管型结构件自动定位焊接机器人,采用定位机构对管型结构件定位固定,再由焊接机构进行焊接,提高了自动化程度,保证了精度。
技术实现要素:
5.本实用新型的目的就是针对现有技术中存在的缺陷提供一种管型结构件自动定位焊接机器人,采用定位机构对管型结构件定位固定,再由焊接机构进行焊接,提高了自动化程度,保证了精度。
6.为了达到上述目的,本实用新型所采用的技术方案是:
7.包括:
8.支撑台,具有一定厚度,为平台结构,顶部设置有放置槽;所述放置槽容纳并支撑管型结构件;
9.定位机构,设置在所述支撑台上,对管型结构件进行固定限位;
10.焊接机构,设置在所述支撑台上,对定位完成的管型结构件进行焊接;
11.其中,所述定位机构包括连接块、锁紧臂和锁槽;所述连接块将所述锁紧臂固定在所述放置槽上;所述锁紧臂为弹性结构,与所述锁槽相配合;所述锁槽设置在所述放置槽内。
12.进一步地,所述放置槽底部垫有抗震垫。
13.进一步地,所述支撑台底部设置有若干万向轮。
14.进一步地,所述锁紧臂的端部设置有若干卡紧棱;所述卡紧棱与设置在所述锁槽
内的卡紧槽相配合,使得所述锁紧臂相对于所述锁槽位移阻力增大。
15.进一步地,所述卡紧棱和所述卡紧槽均为波浪形结构。
16.进一步地,所述焊接机构包括焊枪和位移结构;所述焊枪设置在所述位移结构上;所述位移结构固定在所述支撑台上,控制所述焊枪位移。
17.进一步地,所述位移结构包括垂直摆动臂和水平转动臂;所述垂直摆动臂与所述焊枪连接;所述水平转动臂与所述垂直摆动臂连接。
18.进一步地,所述水平转动臂底部设置有安装座。
19.通过本实用新型的技术方案,可实现以下技术效果:
20.采用定位机构对管型结构件定位固定,再由焊接机构进行焊接,提高了自动化程度,保证了精度。
附图说明
21.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
22.图1为本实用新型实施例中管型结构件自动定位焊接机器人定位机构的结构示意图;
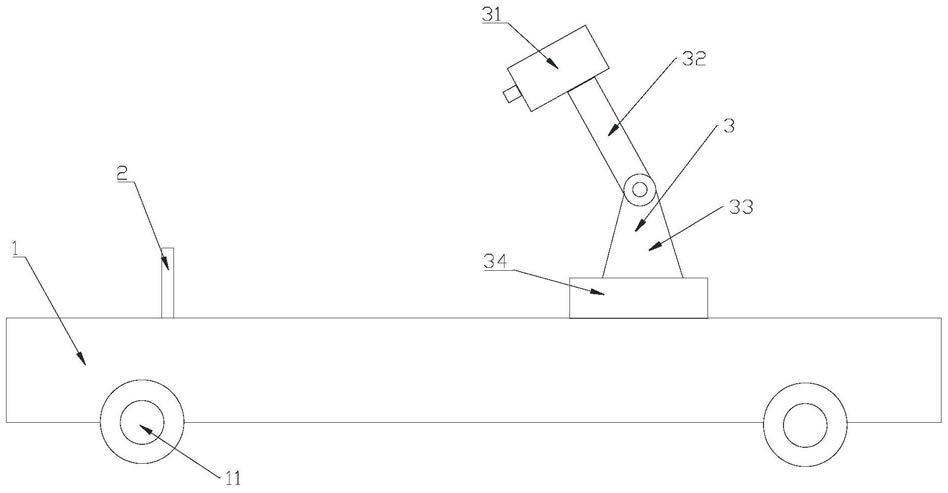
23.图2为本实用新型实施例中管型结构件自动定位焊接机器人的结构示意图;
24.附图标记:支撑台1、定位机构2、焊接机构3、万向轮11、抗震垫12、放置槽13、连接块21、锁紧臂22、锁槽23、焊枪31、垂直摆动臂32、水平转动臂33、安装座34、卡紧棱221和卡紧槽231。
具体实施方式
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
26.在本实用新型的描述中,需要说明的是,属于“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或者位置关系为基于附图所示的方位或者位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
27.一种管型结构件自动定位焊接机器人,如图1所示,
28.包括:
29.支撑台1,具有一定厚度,为平台结构,顶部设置有放置槽13;所述放置槽13容纳并支撑管型结构件;
30.定位机构2,设置在所述支撑台1上,对管型结构件进行固定限位;
31.焊接机构3,设置在所述支撑台1上,对定位完成的管型结构件进行焊接;
32.其中,所述定位机构2包括连接块21、锁紧臂22和锁槽23;所述连接块21将所述锁紧臂22固定在所述放置槽13上;所述锁紧臂22为弹性结构,与所述锁槽23相配合;所述锁槽
23设置在所述放置槽13内。
33.具体的,先将管型结构件放置在支撑台1上的放置槽13内,再压动具有弹性的锁紧臂22,使得管型结构件固定在放置槽13内,位置调节完毕后,将锁紧臂22的端部插入锁槽23内,两者配合实现卡紧,完成定位。最后由焊接机构3对定位完成的管型结构件进行焊接。
34.作为上述实施例的优选,如图1和2所示,所述放置槽13底部垫有抗震垫12。
35.具体的,为了防止放置槽13在焊接过程中突然损坏,导致焊接失败,在放置槽13底部垫有抗震垫12,降低焊接振动带来的影响,提高安全性。
36.作为上述实施例的优选,如图1和2所示,所述支撑台1底部设置有若干万向轮11。
37.具体的,在支撑台1底部设置有若干万向轮11便于移动。
38.作为上述实施例的优选,如图1和2所示,所述锁紧臂22的端部设置有若干卡紧棱221;所述卡紧棱221与设置在所述锁槽23内的卡紧槽231相配合,使得所述锁紧臂22相对于所述锁槽23位移阻力增大。
39.作为上述实施例的优选,如图1和2所示,所述卡紧棱221和所述卡紧槽231均为波浪形结构。
40.具体的,锁紧臂22的端部设置的卡紧棱221与设置在锁槽23内的卡紧槽231相配合,使得锁紧臂22相对于锁槽23的位移阻力增大,保证对管型结构件的锁紧。
41.作为上述实施例的优选,如图1和2所示,所述焊接机构3包括焊枪31和位移结构;所述焊枪31设置在所述位移结构上;所述位移结构固定在所述支撑台1上,控制所述焊枪31位移。
42.作为上述实施例的优选,如图1和2所示,所述位移结构包括垂直摆动臂32和水平转动臂33;所述垂直摆动臂32与所述焊枪31连接;所述水平转动臂33与所述垂直摆动臂32连接。
43.作为上述实施例的优选,如图1和2所示,所述水平转动臂33底部设置有安装座34。
44.以上显示和描述了本实用新型的基本原理、主要特征及优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1